
Technical Background and Objectives
Background
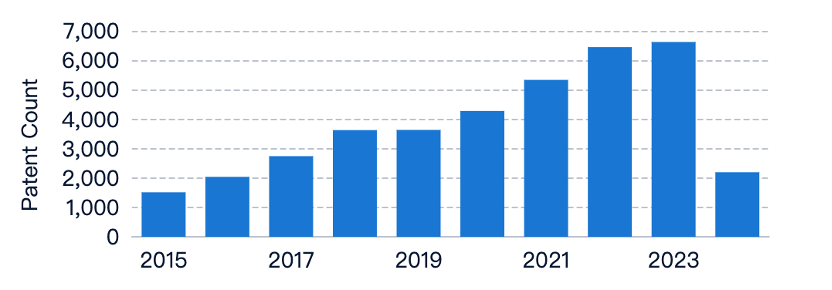
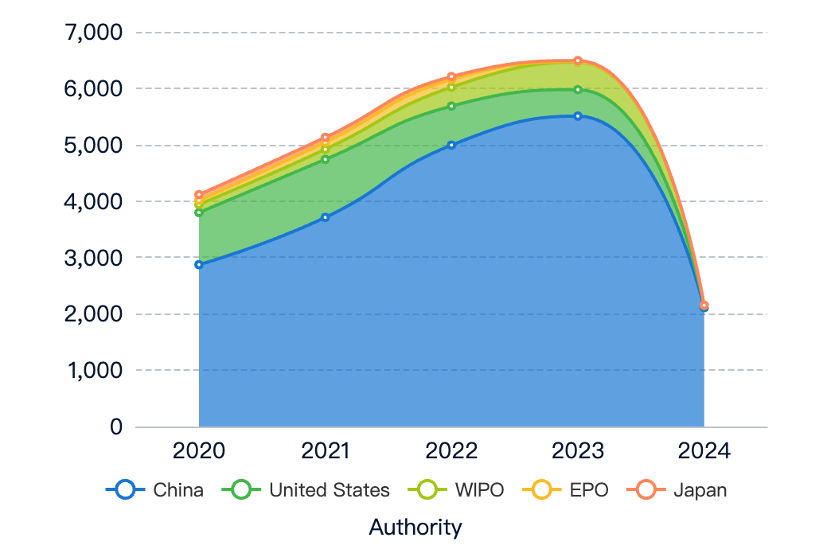
The field of improving the stability of robotic arms has seen significant attention recently. Patent applications related to enhancing robotic arm stability have consistently increased, suggesting growing interest and investment in this area. The trend indicates a shift from theoretical research to practical implementation and commercialization, as evidenced by the divergence between patent applications and literature publications. Overall, improving robotic arm stability is crucial for their performance and reliability across various industries.
Objectives
The primary objective is to enhance the stability of robotic arms, improving their performance and expanding their application scope. The research aims to address challenges related to payload variations, environmental disturbances, and dynamic motions, leading to more reliable and precise robotic arm operations.
To get a detailed scientific explanations of improving the stability of robotic arms, try Eureka.
Technical Current Status Analysis
Industry Overview
Robotic arms are used in industries such as manufacturing, assembly, handling, and inspection. Stability is critical for their performance and reliability in these applications.
Applications and Impact:
- Manufacturing: Welding, painting, and material handling.
- Assembly: Component placement, part handling, and product assembly.
- Inspection: Visual inspection, dimensional measurement, and non-destructive testing.
- Healthcare: Assisting in surgical procedures.
Technical Characteristics and Challenges:
- Mechanical Design and Structural Rigidity: Material selection, joint design, and overall arm geometry impact stability.
- Control Systems and Motion Planning: Trajectory planning, feedback control loops, and compensation for external disturbances.
- Sensor Integration and Feedback: Using sensors like encoders, force/torque sensors, and vision systems.
- Payload and Dynamic Effects: Considering payload weight, inertia, and acceleration/deceleration forces.
- Environmental Factors: Adapting to vibrations, uneven floors, and temperature variations.
- Calibration and Maintenance: Regular calibration and maintenance to ensure stability.
Technological Paths:
- Advanced Mechanical Design and Materials: Using finite element analysis and lightweight materials like carbon fiber composites.
- Adaptive and Intelligent Control Systems: Model-based control, adaptive control, and machine learning-based approaches.
- Multi-Sensor Fusion and State Estimation: Integrating vision systems, force/torque sensors, and inertial measurement units.
- Active Vibration Control and Damping: Implementing active structural control and vibration isolation systems.
- Predictive Maintenance and Condition Monitoring: Using vibration analysis and machine learning-based anomaly detection.
- Collaborative Robotics and Human-Robot Interaction: Force/torque control, collision avoidance, and compliant motion control.
Research Content
Research Objectives
Enhance robotic arm stability to improve performance and expand application scope.
Research Direction and Focus
Advanced Control Algorithms
- Develop adaptive, robust, and intelligent control strategies.
- Explore machine learning and AI approaches for real-time adaptation and optimization.
Mechanical Design Optimization
- Investigate structural components, joint configurations, and material selection.
- Use CAD tools and FEA to simulate and evaluate design alternatives.
Sensor Integration and Feedback Control
- Integrate advanced sensors for real-time feedback.
- Develop closed-loop control systems for precise trajectory tracking and disturbance rejection.
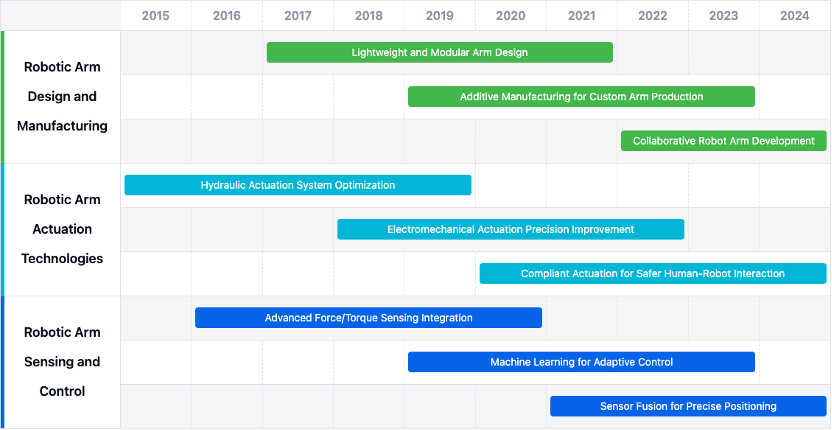
Technical Development Roadmap
Key Areas of Advancement
- Robotic Arm Actuation Technologies: Hydraulic actuation, electromechanical precision, and compliant mechanisms.
- Sensing and Control: Force/torque sensing, machine learning for adaptive control, and sensor fusion technologies.
- Design and Manufacturing: Lightweight and modular designs, additive manufacturing, and collaborative robot arms.
Main Player Analysis
Key Players and Focus
- Cilag GmbH International: Focus on advanced control systems, sensor integration, and mechanical design optimizations.
- Beijing Institute of Technology: Research on bio-inspired control strategies, deep reinforcement learning, and stiffness adjustment.
- Harbin Institute of Technology: Focus on adaptive neural network control, attitude control, and optimization methods.
- Applied Materials Inc.: Emphasis on control systems, sensor integration, and mechanical design for industrial applications.
- Incyte Corp.: Focus on advanced control algorithms, sensor integration, and novel actuator designs.
Current Technical Solution Overview
Robotic Arm Control Systems and Methods
- Improved Stability: Advanced control algorithms, sensor feedback, and real-time adjustments.
- Calibration and Parameter Adjustment: Techniques for joint angles and link lengths.
- Collision Avoidance and Workspace Monitoring: Systems to prevent collisions and ensure safe operation.
- Redundant and Dexterous Control: Methods for resolving redundancy and optimizing joint configurations.
Robotic Arm Collision Avoidance
- Detection and Avoidance Systems: Sensors and algorithms for detecting and avoiding collisions.
- Motion Planning and Control: Trajectory generation and real-time control for collision-free paths.
- Stability and Balance Control: Techniques for maintaining stability and preventing tipping.
Robotic Arm Calibration and Alignment
- Calibration Devices: Specialized fixtures and sensors for accurate measurement and adjustment.
- Kinematics Calibration: Optimization algorithms for joint angles and link lengths.
- Hand-Eye Calibration: Determining relative position between end-effector and vision system.
- Stability and Alignment Calibration: Techniques for compensating for gravity and external forces.
Robotic Arm Design and Components
- Joint Braking Mechanisms: Enhancing stability and control during movement.
- Structural Analysis: Optimizing geometry, materials, and component configurations.
- Motion Control and Trajectory Optimization: Algorithms for stable and precise movements.
- Collision Avoidance and Safety Mechanisms: Systems to prevent collisions and ensure safe operation.
- Alignment and Docking Systems: Ensuring precise positioning and stable connections.
Robotic Arm Applications and Accessories
- Stability Monitoring and Adjustment: Systems for real-time stability monitoring and adjustments.
- Braking and Damping Mechanisms: Reducing oscillations and improving stability.
- Alignment and Positioning Techniques: Ensuring precise orientation and positioning.
- Control and Stabilization Algorithms: Advanced algorithms for stabilizing movements.
- Design for Improved Stability: Features like counterbalance mechanisms and lightweight materials.
Key Patent Interpretation
Patent Highlights
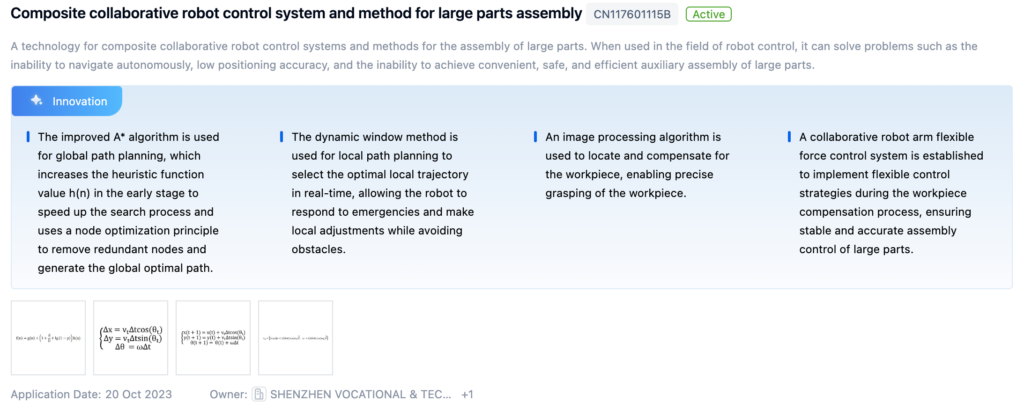
Patent 1: Composite Collaborative Robot Control System and Method for Large Parts Assembly
- Core Invention Points:
- Improved A* algorithm for global path planning.
- Dynamic window method for real-time local path planning.
- Image processing algorithm for precise workpiece grasping.
Patent 2: Robotic Arms
- Core Invention Points:
- First and second arm sections with multiple degrees of freedom.
- Rotation of instrument driver about roll and pitch axes.
- Coupling rollers and links for non-parallel positioning.
Patent 3: Robotic Hybrid System Application Framework Based on Multi-Core Processor Architecture
- Core Invention Points:
- Framework for ARM/X86 multi-core architecture.
- Robotic Operating System (ROS) for non-real-time tasks.
- Real-time operating system and hybrid framework for coordination.
Possible Research Directions
- Robotic Arm Control Systems for Improved Stability: Adaptive control algorithms and real-time adjustments.
- Robotic Arm Design for Increased Stability: Counterbalance mechanisms, optimized geometries, and damping materials.
- Robotic Arm Calibration and Alignment Techniques: Joint angle and link length calibration.
- Robotic Arm Collision Avoidance and Safety Measures: Sensors and algorithms for detecting and avoiding collisions.
- Robotic Arm End-Effector and Payload Management: Managing end-effector configurations and dynamic load adjustments.
If you want an in-depth research or a technical report, you can always get what you want in Eureka Technical Research. Try now!

