
Technical Background and Objectives
Background
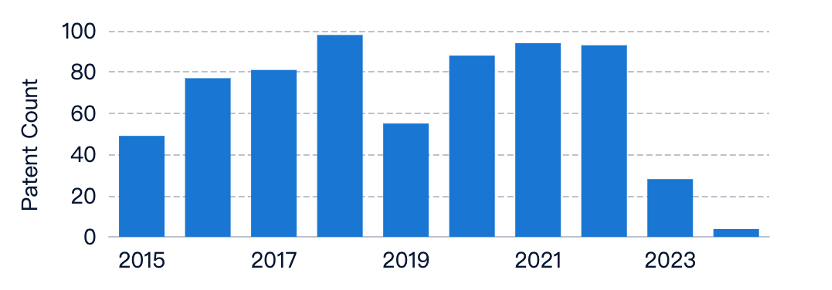
The field of ‘Robotic arm increase flexibility has shown an overall increasing trend in patent applications over the years. Initially, patent applications were at a low level, gradually increasing year by year and reaching a peak in a certain year. After the peak, the number of patent applications remained stable for a few years before showing a slight decline in the most recent year. This trend suggests growing interest and research efforts in improving the flexibility of robotic arms. The initial increase indicates that researchers and companies identified potential opportunities and actively explored and developed new solutions in this field. The peak year likely represents a period of significant technological breakthroughs or innovations. The subsequent stabilization and slight decline in patent applications could be attributed to the maturation of certain technologies, consolidation of research efforts, or a shift in focus towards other aspects of robotic arm development.
Objectives
The primary objective is to explore the potential of robotic arm technology, in order to enhance flexibility and efficiency in various industrial and commercial applications. By leveraging the capabilities of robotic arms, the goal is to develop innovative solutions that streamline processes, improve productivity, and reduce operational costs.
To get a detailed scientific explanations of Robotic arm increase flexibility, try Eureka.
Technical Current Status Analysis
Applications and Impact:
- Power Generation: Analysis and optimization of steam turbines, boilers, and condensers.
- Chemical Processing: Managing temperature and pressure for reactions.
- HVAC Systems: Designing and optimizing steam-based heating systems.
- Robotic Arm Applications: Ensuring high precision and flexibility in operations.
Technical Characteristics and Challenges:
- Accurate Thermodynamic Property Data: Essential for precise control of pneumatic or hydraulic actuators and thermal management systems.
- Real-Time Data Processing: Necessary for responsive and precise movements.
- Integration with Control Algorithms: Requires deep understanding of thermodynamics, control theory, and robotics.
- Sensor Integration and Calibration: Accurate measurement and calibration of relevant parameters.
- Environmental Adaptability: Specialized designs and materials for extreme environments.
- Computational Resources: Optimizing computational efficiency while maintaining accuracy.
Technological Paths:
- Advanced Data Processing and Interpolation Algorithms: Real-time retrieval and processing of thermodynamic property data.
- Integrated Control Algorithms: Seamlessly integrate steam table data with robotic arm control strategies.
- Sensor Fusion and Calibration Techniques: Accurate measurement and monitoring of parameters.
- High-Performance Computing and Embedded Systems: Real-time processing of steam table data.
- Adaptive and Self-Learning Algorithms: Continuously optimize the utilization of steam table data.
- Simulation and Virtual Commissioning: Model and validate the integration of steam table data with robotic arm control systems.
Research Content
Research Objectives
The primary objective is to explore the potential of robotic arm technology, in order to enhance flexibility and efficiency in various industrial and commercial applications.
Research Direction and Focus
Design and Integration of Robotic Arm Systems
- Extensive research to design and develop robotic arm systems tailored for integration with steam tables.
- Study the mechanical, electrical, and software components required for seamless integration.
- Evaluate factors such as payload capacity, reach, precision, and control systems to meet the unique requirements of steam table operations.
Automation and Process Optimization
- Focus on leveraging robotic arm technology to automate and optimize various processes associated with steam tables.
- Tasks may include loading and unloading materials, material handling, inspection, and quality control.
- Aim to improve efficiency, reduce human error, and enhance overall productivity by automating repetitive and labor-intensive tasks.
Flexibility and Adaptability
- Explore methods for enhancing the flexibility and adaptability of robotic arm systems.
- Develop modular designs, implement advanced control algorithms, and explore machine learning techniques for intelligent task planning and execution.
Safety and Reliability
- Develop robust safety protocols, fault detection mechanisms, and redundancy measures to minimize risks and ensure consistent and reliable operation.
- Ensure compliance with relevant industry standards and regulations.
Cost-Benefit Analysis and Feasibility Studies
- Undertake comprehensive cost-benefit analyses and feasibility studies to assess the viability and potential return on investment.
- Evaluate initial investment costs, operational expenses, potential productivity gains, and long-term cost savings associated with the implementation of robotic arm technology in steam table operations.
Technical Development Roadmap
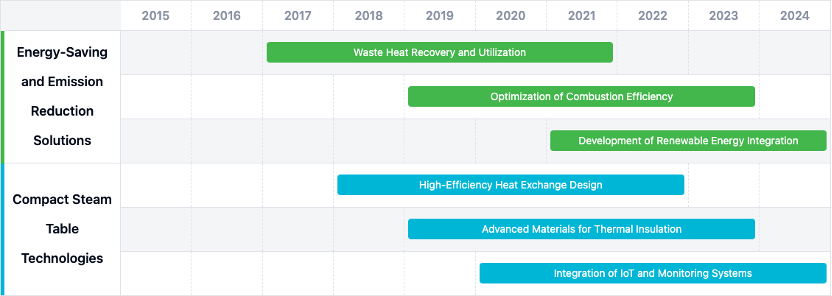
Key Areas of Advancement
- Compact Steam Table Technologies: High-efficiency heat exchange design, advanced materials for thermal insulation, and IoT integration for enhanced performance and efficiency.
- Energy-Saving and Emission Reduction Solutions: Waste heat recovery, combustion efficiency optimization, and renewable energy integration to reduce energy consumption and minimize environmental impact.
Main Player Analysis
Key Players and Focus
- Dow Global Technologies LLC: Focus on advanced materials and coatings to improve the durability and range of motion of robotic arms in high-temperature and corrosive environments.
- Cilag GmbH International: Research on advanced materials, coatings, joint designs, and actuation mechanisms to enable greater range of motion and precision in robotic arms.
- Ethicon LLC: Development of advanced control systems and algorithms for adaptive and responsive robotic arms, with a focus on high-temperature and high-pressure environments.
Current Technical Solution Overview
Robotic Arm for Surgical Applications
- Improved Flexibility and Dexterity: Specialized designs with articulated joints and spherical linkages for enhanced maneuverability.
- Precise and Intuitive Control Systems: Admittance control, force feedback, and user-friendly interfaces for accurate operation.
- Integration with Surgical Tables and Instruments: Docking mechanisms and registration techniques for seamless integration.
- Minimally Invasive and Specialized Procedures: Arm configurations and instrument channels for laparoscopic or dental surgeries.
- Multi-Arm Systems: Multiple arms for greater flexibility and complex task execution.
Extendable and Adjustable Robotic Arms
- Extendable Reach: Telescopic mechanisms and articulated segments for adaptable working environments.
- Adjustable Wrist and End-Effector Mechanisms: Increased flexibility and dexterity in handling objects.
- Mobile and Portable Systems: Wheeled bases and robotic carts for easy relocation.
- Advanced Control and Alignment Systems: Improved precision and ease of use.
- Specialized Applications and Configurations: Tailored for surgical, industrial, and training purposes.
Robotic Arms for Specific Industrial Applications
- Modular and Reconfigurable Designs: Easy modification for different tasks.
- Advanced Motion Control and Kinematics: Precise control for complex tasks.
- Collaborative and Human-Robot Interaction: Safe operation alongside human operators.
- Advanced Sensing and Perception: Real-time adjustments and decision-making.
Robotic Arm Control and Positioning Systems
- Positioning and Movement Control: Accurate guidance for precise operation.
- Collision Avoidance and Safety Systems: Preventing accidents and ensuring safe operation.
- Mobile and Flexible Systems: Adaptable for various environments.
- Alignment and Docking Systems: Accurate positioning and seamless integration.
- Advanced Designs and Configurations: Innovative solutions for specific applications.
Robotic Arm Designs for Specific Applications
- Medical and Surgical Applications: Enhanced precision and safety.
- Enhanced Flexibility and Adaptability: Modular designs and extendable segments.
- Advanced Control and Motion Planning: Improved efficiency and safety.
- Industrial and Automation Tasks: Task-specific end-effectors and control systems.
Key Patent Interpretation
Patent Highlights
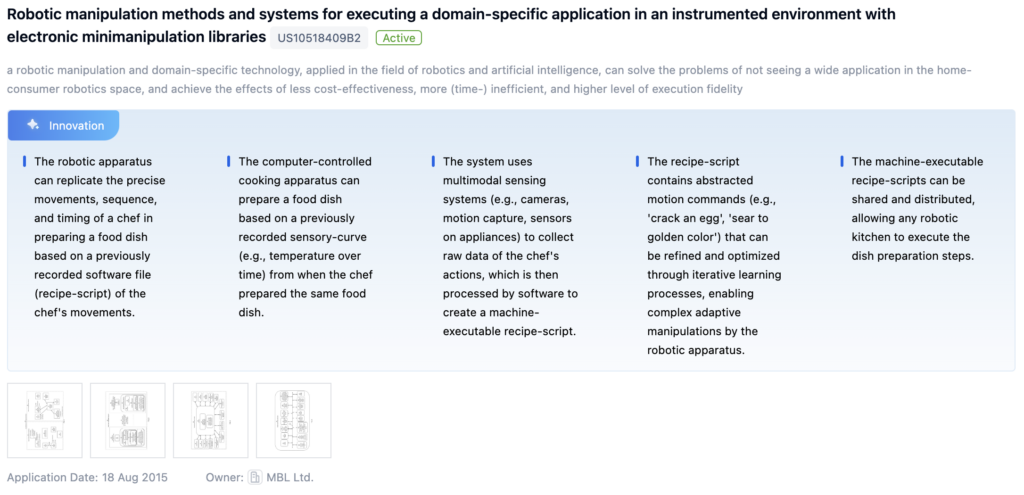
Patent 1: Robotic Manipulation Methods and Systems for Executing a Domain-Specific Application in an Instrumented Environment with Electronic Minimanipulation Libraries
- Core Invention Points:
- Replicates precise movements and timing of a chef in preparing food.
- Uses multimodal sensing systems to collect data and create machine-executable recipe scripts.
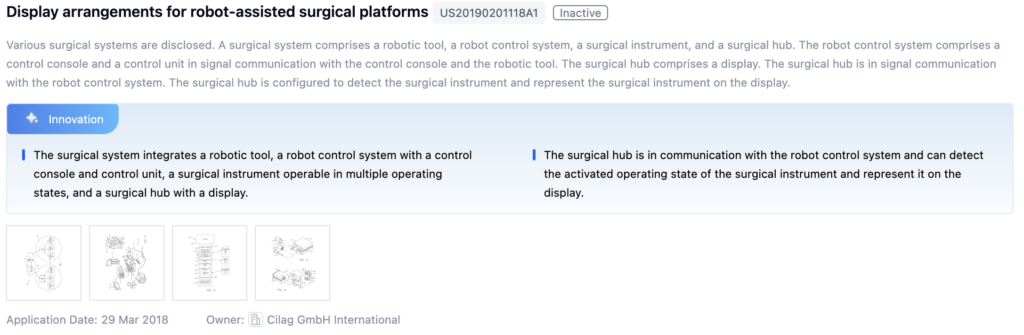
Patent 2: Display Arrangements for Robot-Assisted Surgical Platforms
- Core Invention Points:
- Integrates robotic tools, control systems, and surgical hubs with displays.
- Detects and represents surgical instrument states on the display.
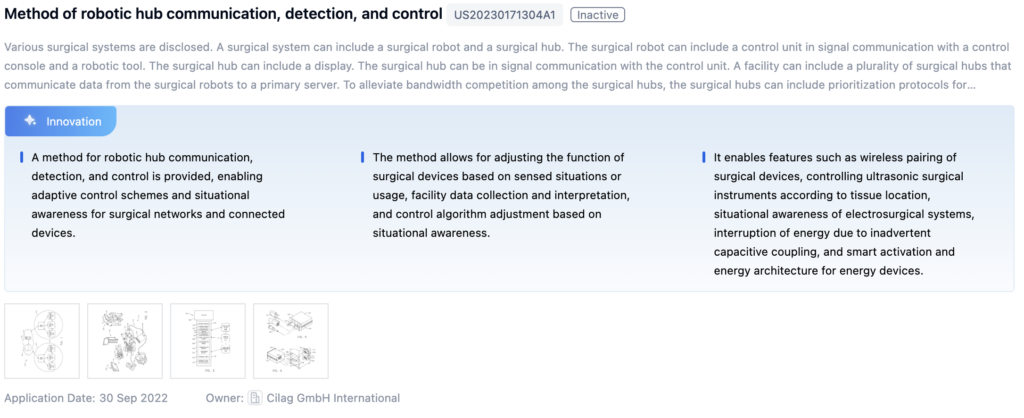
Patent 3: Method of Robotic Hub Communication Detection and Control
- Core Invention Points:
- Enables adaptive control schemes and situational awareness.
- Wireless pairing of surgical devices and situational control adjustments.
Possible Research Directions
- Robotic Arm with Adjustable Joints for Increased Flexibility: Mechanisms for pivoting, rotating, or telescoping joints.
- Robotic Arm with Counterbalancing or Anti-Sway Mechanisms: Stabilization mechanisms for precise positioning.
- Robotic Arm with Modular or Detachable End-Effectors: Quick tool changes for versatile tasks.
- Mobile or Portable Robotic Arm Systems: Mounted on carts or wheeled bases for easy repositioning.
- Robotic Arm with Advanced Control and Programming Capabilities: Adaptive grasping, gesture control, and learning complex movements.
If you want an in-depth research or a technical report, you can always get what you want in Eureka Technical Research. Try now!

