
Technical Background and Objectives
Background
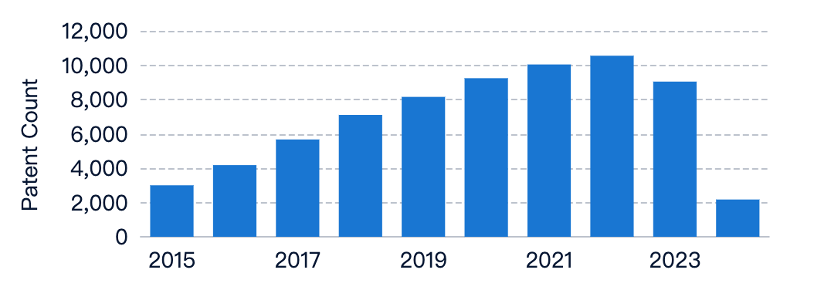
The data shows a clear upward trend in patent applications related to improving the work efficiency of industrial robots in recent years. This indicates a surge of innovation and technological breakthroughs, with companies and researchers actively seeking to protect their intellectual property. However, related academic literature publications have been relatively low and fluctuating, suggesting that while commercialization and practical applications are emphasized, academic research and theoretical studies may need more attention. Collaboration between industry and academia could bridge this gap and foster more balanced and sustainable development.
Objectives
The primary objective is to enhance the work efficiency of industrial robots through innovative technologies and methodologies. By leveraging advancements in robotics, automation, and artificial intelligence, the goal is to improve operational efficiency, reduce costs, increase safety, and promote sustainability in various industrial sectors.
To get a detailed scientific explanations of improving the work efficiency of industrial robots, try Eureka.
Technical Current Status Analysis
Industrial Robots Overview
Industrial robots are integral to modern manufacturing, improving production efficiency, reducing labor costs, and ensuring consistent quality. However, as manufacturing processes become more complex and demand for customization grows, the need for more efficient and flexible industrial robots has increased.
Applications and Impact:
- Automotive Industry: Tasks like welding, painting, and assembly, requiring cycle time reduction and adaptability.
- Electronics Industry: Tasks such as pick-and-place operations, soldering, and inspection, demanding higher precision and faster speeds.
- Food and Beverage Industry: Packaging, palletizing, and material handling, requiring stringent hygiene and frequent changeovers.
- Logistics and Warehousing: Sorting, picking, and palletizing, necessitating efficiency and intelligence for faster delivery times.
Technical Characteristics and Challenges:
- Precision and Accuracy: High levels of precision and accuracy are required, which can be challenging due to mechanical tolerances and environmental conditions.
- Speed and Cycle Time: Faster operation speeds and shorter cycle times are crucial but can compromise precision, requiring advanced control systems and motion planning algorithms.
- Flexibility and Adaptability: Modern manufacturing needs frequent changeovers and handling a wide range of products, necessitating modular designs and advanced programming techniques.
- Integration and Connectivity: Seamless integration with other automation systems and robust connectivity for data exchange.
- Intelligent Control and Decision-Making: Traditional robots rely on pre-programmed routines, limiting their adaptability. Incorporating AI and machine learning can optimize performance and enable real-time decision-making.
Technological Paths:
- Advanced Control Systems: Model-predictive control, adaptive control, and intelligent motion planning to improve precision, speed, and efficiency.
- Sensor Integration and Feedback Systems: Vision systems, force/torque sensors, and tactile sensors for real-time feedback and performance optimization.
- Modular and Reconfigurable Designs: Easily adaptable robots for different tasks and production requirements.
- Collaborative Robot Systems: Integrating cobots for safe and efficient human-robot collaboration.
- Artificial Intelligence and Machine Learning: Enabling robots to learn from data, optimize performance, and make intelligent decisions.
- Cloud Robotics and Digital Twin Technologies: Remote monitoring, data analysis, and predictive maintenance to reduce downtime and improve efficiency.
Research Content
Research Objectives
Enhance the work efficiency of industrial robots through innovative technologies and methodologies, leveraging advancements in robotics, automation, and AI.
Research Direction and Focus
Advanced Motion Planning and Control Algorithms
- Develop motion planning and control algorithms for navigating complex environments with agility and adaptability.
- Integrate machine learning techniques for real-time path planning, obstacle avoidance, and trajectory optimization.
- Implement advanced control strategies like model predictive control and adaptive control to enhance responsiveness and accuracy.
Intelligent Sensor Integration and Data Fusion
- Develop intelligent sensor systems integrating vision, tactile, and force/torque sensors.
- Use advanced data fusion techniques like Kalman filters and deep learning-based sensor fusion for comprehensive environmental understanding.
Human-Robot Collaboration and Intuitive Interfaces
- Develop natural language processing and gesture recognition systems for intuitive communication between humans and robots.
- Investigate augmented reality and virtual reality technologies for enhanced situational awareness and remote control.
Technical Development Roadmap
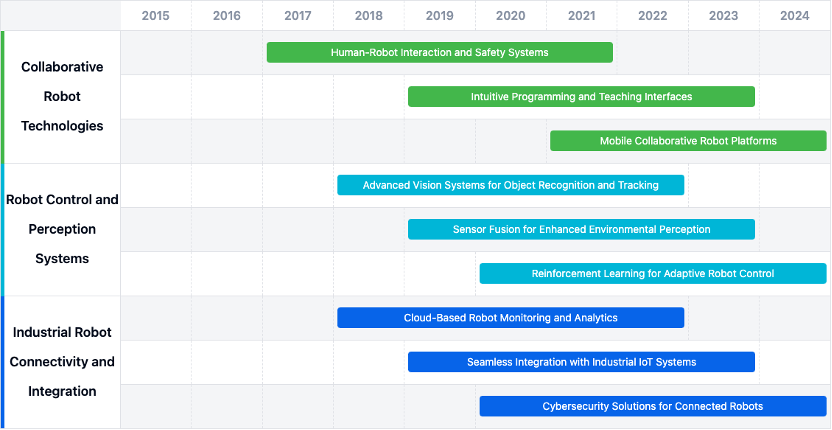
Key Areas of Advancement
- Robot Control Systems: Advanced motion control algorithms, machine learning, and cloud-based platforms.
- Robot Perception and Sensing: 3D vision, depth sensing, tactile sensing, force control, and multi-modal sensor fusion.
- Robot Mobility and Navigation: Autonomous navigation, legged and hybrid locomotion, and swarm robotics.
Main Player Analysis
Key Players and Focus
- Samsung Electronics Co., Ltd.: AI-powered control systems, advanced sensors, and collaborative robotics for high-precision and efficient operations.
- QUALCOMM Inc.: 5G connectivity, edge computing, and AI-powered robotics control for real-time data processing and remote monitoring.
- LG Electronics Inc.: Advanced control algorithms, human-robot collaboration, and intelligent sensing technologies for flexible robotic solutions.
- Huazhong University of Science & Technology: Optimal tracking control, trajectory planning, and force synchronization for precise and efficient robotics.
- Hangzhou Dianzi University: Intelligent scheduling systems, automated assembly lines, and machine vision-based quality control solutions.
Current Technical Solution Overview
Optimizing Robot Motion and Trajectory
- Motion Trajectories Using Distance Fields: Utilize distance fields for faster and more efficient path planning.
- Energy-Efficient Motion Optimization: Adjust velocity, acceleration, and deceleration profiles to minimize energy consumption.
- Dynamic Motion Planning and Control: Adapt trajectories in real-time based on sensor data.
- Collaborative Motion and Force-Torque Control: Enable robots to work safely alongside humans, adjusting movements based on sensor feedback.
- Motion Transfer and Mapping: Replicate complex movements by capturing and translating motion data.
Improving Robot Control Systems
- Enhanced Control Systems: Advanced control algorithms, sensor integration, and communication interfaces for optimized performance.
- Calibration and Teaching Methods: Accurate calibration and intuitive teaching methods for efficient task execution.
- Mechanical Design Optimization: Improved joint configurations, optimized kinematics, and specialized end-effectors for specific tasks.
- Monitoring and Supervision Systems: Real-time feedback and adjustments to ensure safe and efficient operations.
- Machine Learning for Work Efficiency: Intelligent systems that learn and adapt to optimize processes and predict maintenance needs.
Energy-Efficient Robot Designs
- Optimized Trajectory Planning: Reduce energy consumption by minimizing acceleration, deceleration, and unnecessary movements.
- Lightweight and Efficient Components: Use lightweight materials and efficient structural components to reduce energy requirements.
- Intelligent Energy Management: Monitor and optimize energy consumption with intelligent systems.
- Efficient Actuator and Drive Systems: Energy-efficient motors and control algorithms to minimize energy losses.
- Optimized Task Allocation and Scheduling: Efficiently distribute tasks among multiple robots to reduce overall energy consumption.
Collaborative and Flexible Robot Systems
- Modular Design: Flexible and modular joints for increased dexterity and adaptability.
- Multi-Robot Collaboration: Optimize task allocation and coordination among multiple robots.
- Flexible Workstations: Reconfigurable workstations for different tasks and production requirements.
- Control and Motion Planning: Safe and efficient operation in dynamic environments.
- Sensor Integration: Force sensors and other sensing capabilities for safe and precise interactions.
Specialized Robot Tools and End-Effectors
- End-Effectors for Specialized Tasks: Grippers, tools, and end-effectors tailored for specific operations.
- Work Evaluation and Monitoring: Track performance and ensure accurate task execution.
- Tool Changing and Storage Systems: Enable robots to switch tools quickly for different tasks.
- Machine Tool Integration: Automate loading, unloading, and processing of workpieces.
- Mobile and Specialized Robots: Design robots for specific tasks and hard-to-reach areas.
Key Patent Interpretation
Patent Highlights
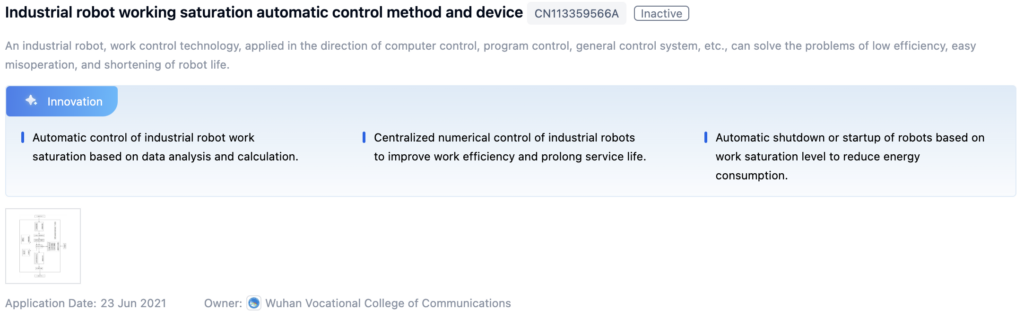
Patent 1: Industrial Robot Working Saturation Automatic Control Method and Device
- Core Invention Points:
- Automatic control of robot work saturation based on data analysis.
- Centralized numerical control to improve efficiency and prolong service life.
- Automatic shutdown or startup based on work saturation to reduce energy consumption.
Patent 2: Automatic Control Method and Device for Work Saturation of an Industrial Robot
- Core Invention Points:
- Data mining to analyze work saturation and efficiency.
- Automatic control of robot number in working state based on saturation.
- Significant difference judgment method to analyze data correlation.
Patent 3: Industrial Robot with High Working Efficiency
- Core Invention Points:
- Maintenance-friendly design to improve service life and efficiency.
- High-efficiency mechanism with multi-directional adjustment and precise control.
- Refrigeration and ventilation systems to dissipate heat and protect internal components.
Possible Research Directions
- Improving Energy Efficiency of Industrial Robots: Techniques to reduce energy consumption through optimized motion trajectories, energy-saving control algorithms, and intelligent power management.
- Enhancing Control and Coordination: Advanced control methods to improve robot coordination and efficiency.
- Developing Specialized Tools and End-Effectors: Design tools for specific applications to enhance efficiency.
- Integrating Robots into Efficient Work Cells: Coordinated systems for optimized workflow and productivity.
If you want an in-depth research or a technical report, you can always get what you want in Eureka Technical Research. Try now!

