
Technical Background and Objectives
Background
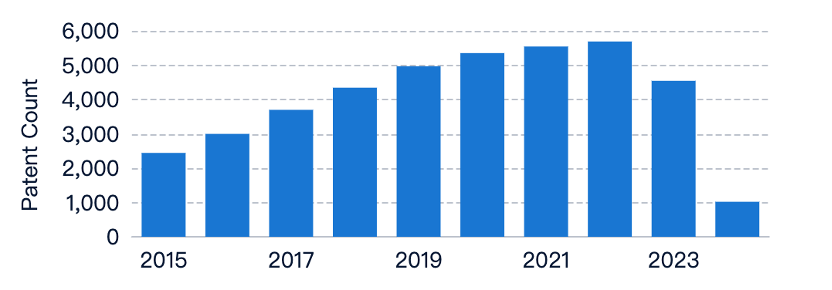
The technical field of industrial robots suitable for industrial production has shown an upward trend in patent applications over the years. The number of patent applications has been steadily increasing, indicating growing interest and investment. However, related literature publications show fluctuations, suggesting that academic research and theoretical studies may not receive as much attention as industrial and commercial interests. The continuous upward trend in patent applications highlights the priority of developing industrial robots suitable for production, driven by technological innovation and commercial investment.
Objectives
The primary objective is to develop industrial robots specifically designed and optimized for industrial production environments. These robots should possess the necessary capabilities, durability, and adaptability to seamlessly integrate into various manufacturing processes, enhancing productivity, efficiency, and cost-effectiveness. The research will focus on addressing the unique challenges and requirements of industrial production settings, ensuring that the developed robots can operate reliably and safely in such environments.
To get a detailed scientific explanations of Industrial Robots, try Eureka.
Technical Current Status Analysis
Industrial Robots Overview
Industrial robots have become indispensable in modern manufacturing, improving production efficiency, product quality, and worker safety. They are widely adopted in industries such as automotive, electronics, food processing, and pharmaceuticals.
Applications and Impact:
- Automotive Industry: Welding, painting, and material handling for high-volume production with consistent quality.
- Electronics Industry: Precise assembly, testing, and packaging of delicate components.
- Food Processing and Packaging: Pick-and-place operations, palletizing, and packaging for hygiene and efficiency.
- Pharmaceutical Industry: Drug formulation, vial filling, and packaging, requiring accuracy and sterile conditions.
Technical Characteristics and Challenges:
- Flexibility and Adaptability: Developing robots with versatility and the ability to quickly reconfigure for different applications.
- Precision and Accuracy: Ensuring consistent precision across various operating conditions and over extended periods.
- Collaborative Operation: Enhanced safety features and intuitive interfaces for seamless human-robot collaboration.
- Connectivity and Integration: Seamless integration with other systems for real-time monitoring, data exchange, and remote control.
- Autonomous Operation: Advanced autonomy capabilities like self-calibration, fault detection, and autonomous decision-making.
- Environmental Resilience: Reliable operation in harsh environments with high temperatures, humidity, dust, or chemicals.
- Energy Efficiency: Improving energy efficiency to reduce operational costs and environmental impact.
Technological Paths:
- Modular and Reconfigurable Robot Design: Easy adaptation to different tasks and production requirements.
- Advanced Sensor Integration and Control Systems: Vision systems, force/torque sensors, and tactile sensors with intelligent control algorithms.
- Collaborative Robot Technologies: Advanced safety features, intuitive human-machine interfaces, and intelligent control systems.
- Industrial Internet of Things (IIoT) and Cloud Integration: Robust communication protocols and interfaces for real-time monitoring and control.
- Artificial Intelligence and Machine Learning: Enabling autonomous operation, self-calibration, fault detection, and adaptive behavior.
- Robust and Resilient Design: Ruggedized components and environmental protection features for reliable operation.
- Energy-Efficient Systems: Optimized motion planning algorithms and intelligent power management systems.
Research Content
Research Objectives
Develop industrial robots specifically designed and optimized for industrial production environments, enhancing productivity, efficiency, and cost-effectiveness, to make industrial robots more suitable for industrial production.
Research Direction and Focus
Robotic System Design and Engineering
- Focus on mechanical design, control systems, and software architecture.
- Develop modular and scalable designs adaptable to different production processes.
- Consider factors like robotic arm kinematics, payload capacity, reach, and precision.
Sensor Integration and Perception
- Explore advanced sensor technologies such as vision systems, force/torque sensors, and proximity sensors.
- Develop perception algorithms for object recognition, pose estimation, and environmental mapping.
Human-Robot Collaboration and Safety
- Investigate methods for safe and intuitive interaction, including gesture recognition, voice commands, and augmented reality interfaces.
- Develop robust safety protocols, collision avoidance mechanisms, and fault-tolerant systems.
Robotic Process Integration and Optimization
- Develop standardized communication protocols, data exchange formats, and interfaces for seamless integration with other automation systems.
- Optimize robotic task planning, scheduling, and coordination for improved production efficiency.
Robotic System Maintenance and Reliability
- Develop predictive maintenance strategies, fault diagnosis techniques, and remote monitoring and diagnostics capabilities.
- Explore modular and reconfigurable robotic designs for easy repair, component replacement, and system upgrades.
Technical Development Roadmap
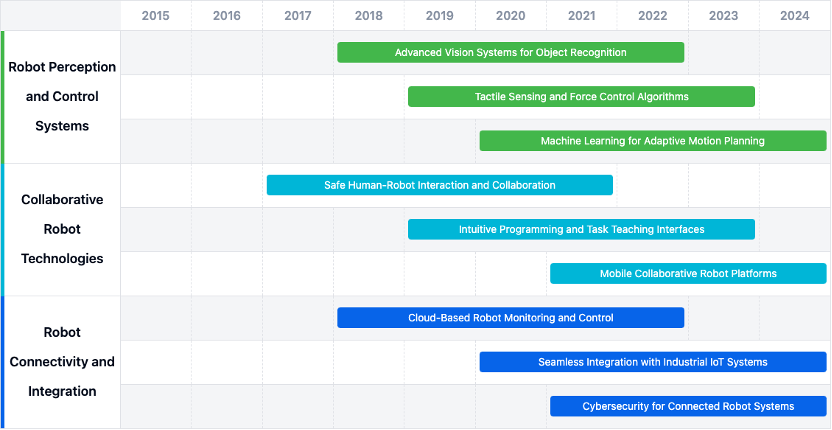
Key Areas of Advancement
- Robot Perception and Control Systems: Advanced vision systems, tactile sensing, force control algorithms, and adaptive motion planning.
- Collaborative Robot Technologies: Safe and intuitive human-robot interaction, user-friendly programming interfaces, and mobile collaborative robot platforms.
- Robot Connectivity and Integration: Cloud-based monitoring and control, seamless integration with IIoT systems, and cybersecurity for connected robot systems.
Main Player Analysis
Key Players and Focus
- Technische Universität München: Research on AI, computer vision, kinematics, and control systems for industrial robots.
- Siemens AG: Extensive patent portfolio covering robotic manipulators, vision systems, motion control, and industrial communication protocols.
- Toray Industries Inc.: Advanced materials, components, and subsystems for industrial robots, focusing on durability, precision, and performance.
- LG Electronics Inc.: Advanced electronics, control systems, and software solutions for industrial robots.
- RWTH Aachen University: Research on autonomous tool trolleys, reconfigurable production systems, and self-optimizing assembly systems.
Current Technical Solution Overview
Industrial Robots Designed for Production Workshops
- Industrial Robots for Production Lines: Designed for high precision and speed in various production processes.
- Modular and Reconfigurable Systems: Easily adaptable to different production requirements.
- Specialized Tools and End-Effectors: Equipped with tools for specific tasks like welding, painting, or material handling.
- Control Systems and Programming Methods: Efficient control and programming for production environments.
- Parallel Kinematics for Production Lines: High stiffness, precision, and payload capacity for accurate positioning.
Industrial Robots for Production Lines
- Automated Production Lines: Performing tasks like assembly, material handling, welding, and inspection.
- Modular and Reconfigurable Robots: Customizable for different tasks or product lines.
- Safety and Control Mechanisms: Ensuring safe operation and preventing accidents.
General-Purpose Industrial Robots
- Versatile Applications: Suitable for various tasks in production environments.
- Production Control Systems: Enabling intelligent control and data management.
- General-Purpose Production Cells: Modular and reconfigurable for efficient production.
- Engines and Power Sources: Adaptable for different power requirements.
- Inspection and Testing Equipment: Ensuring quality and compliance.
Industrial Robot Systems and Control Methods
- Control Systems: Efficient and precise control of robot movements.
- Programming and Operation Methods: Facilitating accurate programming and operation.
- Safety Features: Ensuring safe collaboration with human workers.
- Communication and Networking: Enabling remote monitoring and data exchange.
Industrial Robots for Specific Applications
- Wiring Board Assembly and Material Handling: Tailored features for specific tasks.
- Advanced Control and Programming Capabilities: Efficient operation and task coordination.
- Specialized Kinematics or Configurations: Increased dexterity and flexibility.
- Material Processing and Manipulation: Equipped with tools for processing operations.
Key Patent Interpretation
Patent Highlights
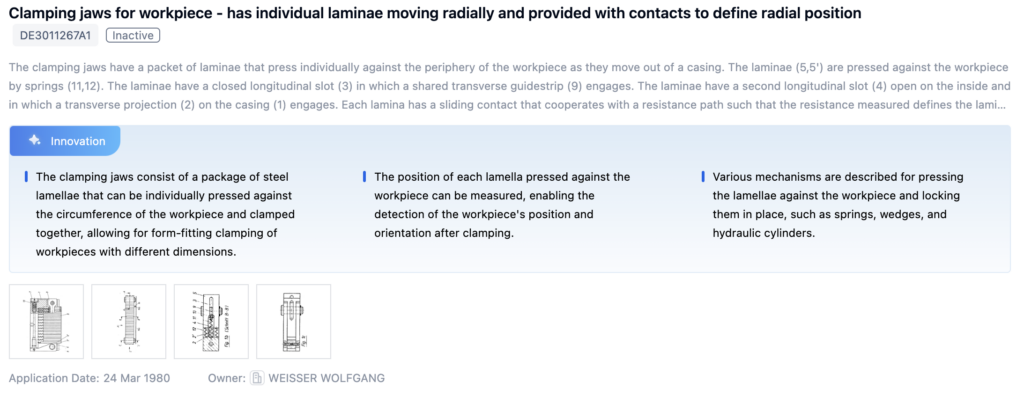
Patent 1: Clamping Jaws for Workpiece
- Core Invention Points:
- Steel lamellae clamping workpieces with form-fitting accuracy.
- Position measurement for detecting workpiece orientation.
- Mechanisms for pressing and locking lamellae in place.
Patent 2: IIoT Platform for Intelligence Development
- Core Invention Points:
- Data collection, learning, and streaming for analytics and maintenance.
- Integration of sensors, edge devices, cloud computing, and data analytics.
Patent 3: Image Analysis Method for Object Classification
- Core Invention Points:
- Circular dissection of binary images for rotational position calculation.
- Evaluating features like centroids, areas, and mutual positions.
Possible Research Directions
- Improving Energy Efficiency: Reducing energy consumption through optimized motion trajectories and energy-saving algorithms.
- Enhancing Control and Coordination: Advanced methods to improve robot coordination and efficiency.
- Developing Specialized Tools and End-Effectors: Designing tools for specific applications to enhance efficiency.
- Integrating Robots into Efficient Work Cells: Coordinated systems for optimized workflow and productivity.
If you want an in-depth research or a technical report, you can always get what you want in Eureka Technical Research. Try now!

