
Technical Background and Objectives
Background
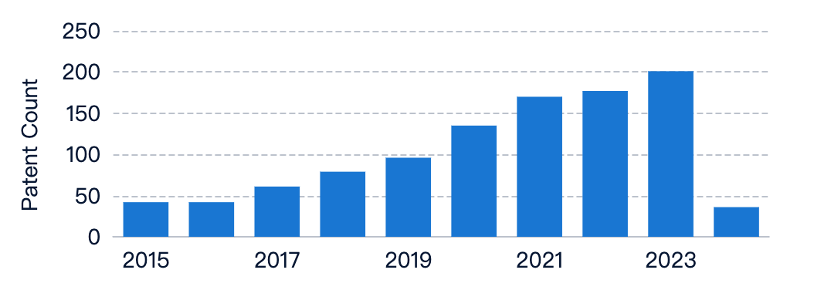
The field of inverse kinematics, with a focus on accurate pose estimation, has seen steady growth in patent applications, indicating sustained interest and active research efforts. However, the number of related literature publications has been relatively low and inconsistent, suggesting that the research in this field is driven more by industrial and commercial interests, leading to higher emphasis on patenting innovations rather than academic publications.
Objectives
The primary objective is to develop advanced inverse kinematics algorithms and techniques for accurate pose estimation. This research aims to address challenges such as redundancy, singularities, constraints, computational efficiency, and accuracy in pose estimation.
To get a detailed scientific explanations of Inverse Kinematics, try Eureka.
Technical Current Status Analysis
Inverse Kinematics Overview
Inverse kinematics is crucial in robotics and computer animation for determining joint configurations to achieve a desired end-effector pose. Accurate pose estimation is essential in various applications:
- Robotics: Precision in manipulation, assembly, and material handling.
- Computer Animation: Realistic and natural motions for virtual characters.
- AR and VR: Accurate tracking and alignment of virtual objects.
- HCI: Gesture recognition and motion tracking for intuitive interactions.
- Biomechanics and Rehabilitation: Motion analysis and assistive device control.
Technical Challenges:
- Redundancy: Multiple solutions due to more degrees of freedom.
- Singularities: Configurations leading to numerical instabilities.
- Constraints and Limits: Joint limits and obstacle avoidance.
- Computational Efficiency: Real-time performance requirements.
- Accuracy and Stability: Precision in manipulation and motion tracking.
Technological Paths:
- Analytical Methods: Efficient solutions for specific configurations.
- Numerical Optimization: Iterative algorithms considering constraints.
- Hybrid Approaches: Combining analytical and numerical methods.
- Constraint Handling: Advanced techniques for resolving redundancies.
- Parallel and Distributed Computing: Accelerating computations.
- Machine Learning and Data-Driven Approaches: Leveraging datasets for accurate mappings.
Research Content
Research Objectives
Develop advanced inverse kinematics algorithms and techniques for accurate pose estimation.
Research Direction and Focus
Analytical and Numerical Approaches
- Explore analytical and numerical methods, including closed-form solutions, iterative methods, and optimization-based approaches.
- Improve accuracy, convergence, and computational efficiency while addressing singularities and joint limits.
Machine Learning and Data-Driven Techniques
- Leverage machine learning models such as neural networks to approximate inverse kinematics mappings.
- Focus on data generation, model training, and generalization for accurate and real-time pose estimation.
Hybrid and Integrated Approaches
- Combine analytical, numerical, and machine learning techniques to create synergistic solutions.
- Integrate domain knowledge and constraints into hybrid frameworks.
Practical Applications and Case Studies
- Validate proposed algorithms through practical applications in robotics, computer animation, and AR/VR.
- Utilize real-world datasets and scenarios to assess performance and generalization capabilities.
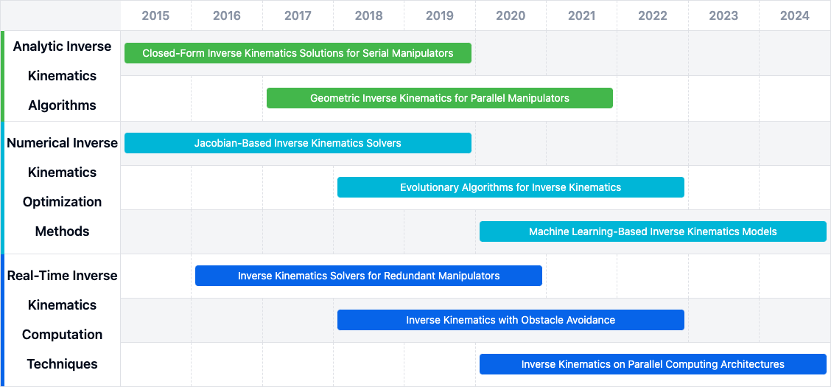
Technical Development Roadmap
Key Areas of Advancement
- Analytic Inverse Kinematics Algorithms: Closed-form solutions for serial and parallel manipulators, and singularity-robust solvers.
- Numerical Optimization Methods: Jacobian-based solvers, evolutionary algorithms, and machine learning models.
- Real-Time Computation Techniques: Solvers for redundant manipulators, obstacle avoidance, and parallel computing architectures.
Main Player Analysis
Key Players and Focus
- NVIDIA Corp.: Real-time inverse kinematics calculations and pose tracking using advanced computational capabilities.
- Intuitive Surgical Operations Inc.: Precise control of surgical instruments through advanced algorithms and control systems.
- University of California San Diego: Advanced algorithms and deep learning techniques for solving inverse problems.
- Lucomm Technologies Inc.: Accurate pose estimation and inverse kinematics for robotics, computer vision, and VR/AR.
- Technion-Israel Institute of Technology: Efficient solutions for pose estimation and shape registration in various domains.
Current Technical Solution Overview
Inverse Kinematics for Pose Estimation
- Techniques: Accurate pose estimation using kinematic constraints and joint relationships.
- Neural Network Approaches: Training models on large datasets for improved accuracy and robustness.
- Multi-Modal Methods: Combining different modalities for enhanced pose estimation.
- Application-Specific Techniques: Tailoring solutions for specific applications like motion capture and robot motion planning.
Machine Learning for Pose Estimation
- Models: Neural networks and machine learning models trained on large datasets.
- Inverse Kinematics: Solving kinematic equations for articulated systems.
- Camera Pose Estimation: Analyzing images and tracking features for accurate pose estimation.
- Refinement Techniques: Iterative processes to improve initial estimates.
Camera Pose Estimation
- Visual Features: Extracting and matching features for pose estimation.
- Optimization-Based Methods: Minimizing reprojection errors.
- Deep Learning: Neural networks for direct pose prediction from images.
- Sensor Fusion: Combining visual data with other sensors for robust estimation.
Object Pose Estimation
- Neural Networks: Estimating 3D pose from images or data.
- Instance Segmentation: Identifying and segmenting objects for pose estimation.
- Collaborative Estimation: Jointly estimating pose and attributes.
- Inverse Kinematics: Solving for joint angles in articulated systems.
- Image Reconstruction: Estimating pose for 3D reconstruction.
Human Pose Estimation
- Deep Learning: Techniques like CNNs and RNNs for human pose estimation.
- 3D Estimation from 2D Data: Lifting 2D information to 3D space.
- Inverse Kinematics: Fitting kinematic models to observed data.
- HCI Applications: Gesture recognition and augmented reality.
- Action Recognition: Using pose information for action classification.
Key Patent Interpretation
Patent Highlights
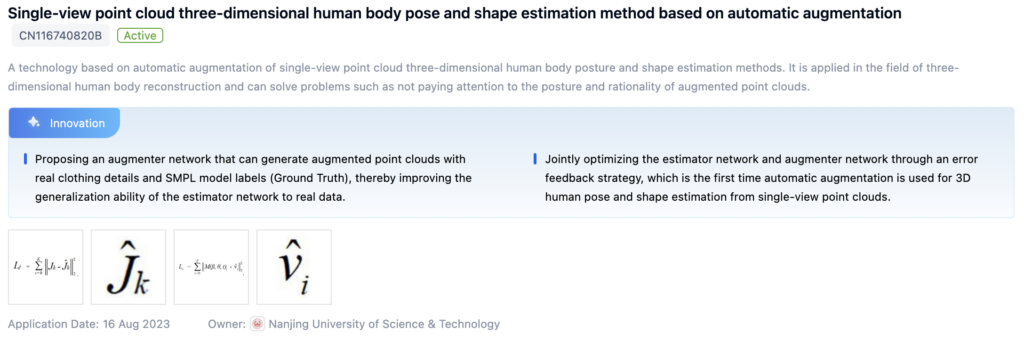
Patent 1: Single-View Point Cloud 3D Human Pose and Shape Estimation
- Core Invention Points:
- Augmenter network for generating augmented point clouds with real clothing details.
- Joint optimization of augmenter and estimator networks through error feedback.
Patent 2: Methods for Refining Original Robot Command Signals
- Core Invention Points:
- Correcting pose errors caused by nominal parameters.
- Providing solutions for complex robot linkages.
- Enabling periodic recalibration in factory environments.
Patent 3: Robot Control with Bootstrapping Inverse Kinematics
- Core Invention Points:
- Method for effector control with redundant degrees of freedom.
- Learning inverse kinematics function through supervised learning.
Possible Research Directions
- Inverse Kinematics Techniques for Accurate Pose Estimation: Solving the inverse kinematics problem to estimate the pose of articulated objects.
- Machine Learning Approaches: Leveraging deep neural networks for accurate pose estimation from input data.
- Camera Pose Estimation: Techniques for determining camera pose relative to scenes or objects.
- Multi-Modal and Sensor Fusion: Combining data from various sources for robust pose estimation.
- Incremental and Refinement Techniques: Iterative processes for improving pose estimates.
If you want an in-depth research or a technical report, you can always get what you want in Eureka Technical Research. Try now!
