
Technical Background and Objectives
Background
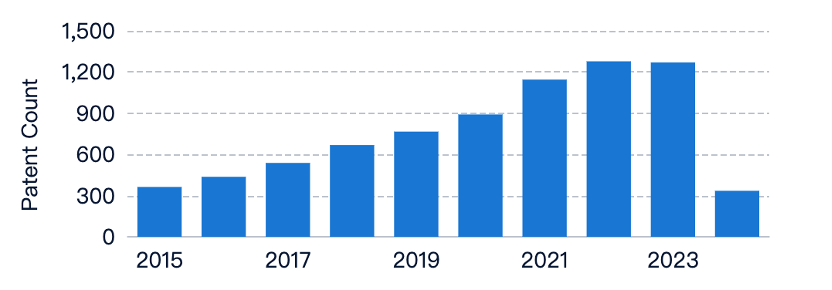
Inverse kinematics techniques, aiming for high positioning accuracy, has seen a steady increase in patent applications over the years, indicating growing interest and continuous advancements. However, related literature publications have fluctuated, suggesting that while there is active research and development in the industry, academic exploration remains relatively stable. The divergence between patent applications and literature publications indicates a stronger focus on practical applications and commercialization in the industry.
Objectives
The primary objective is to develop advanced inverse kinematics algorithms and techniques to achieve high positioning accuracy across various applications. This research aims to overcome challenges such as redundancy, singularities, constraints, computational efficiency, and accuracy, thereby enhancing the precision and reliability of inverse kinematics solutions.
To get a detailed scientific explanations of Inverse Kinematics, try Eureka.
Technical Current Status Analysis
Inverse Kinematics Overview
Inverse kinematics is essential in robotics and computer animation for determining joint configurations to achieve a desired end-effector pose. Accurate pose estimation is crucial in:
- Industrial Robotics: Precision in tasks like assembly, welding, and material handling.
- Medical Robotics: High positioning accuracy during delicate surgical procedures and rehabilitation.
- Computer Animation and VR: Realistic character animations and motion capture.
- Aerospace Engineering: Precise positioning of robotic manipulators in spacecraft operations.
- Augmented Reality: Accurate overlays of virtual objects in real-world environments.
Technical Challenges:
- Multiple Solutions: Selecting the most appropriate solution among many.
- Singularities: Avoiding configurations where equations become ill-conditioned.
- Redundancy: Resolving redundancy while optimizing additional criteria.
- Real-Time Performance: Achieving computational efficiency for real-time applications.
- Accuracy and Precision: Ensuring high positioning accuracy and precision.
- Modeling and Calibration: Accurate modeling and calibration of the kinematic chain.
Technological Paths:
- Advanced Numerical Methods: Iterative methods, optimization techniques, and machine learning approaches.
- Analytical Solutions: Closed-form solutions for specific kinematic chains.
- Parallel Computing and Hardware Acceleration: Using GPUs and FPGAs for real-time execution.
- Sensor Fusion and Calibration Techniques: Integrating vision systems and motion capture.
- Hybrid Approaches: Combining analytical, numerical, and machine learning methods.
- Optimization and Constraint Handling: Incorporating advanced algorithms for redundancy resolution and constraint handling.
Research Content
Research Objectives
Develop advanced inverse kinematics algorithms and techniques to achieve high positioning accuracy.
Research Direction and Focus
Advanced Numerical Methods
- Explore efficient iterative solvers and global optimization algorithms.
- Handle redundancies and singularities in kinematic chains.
Analytical and Geometric Approaches
- Develop closed-form solutions for specific mechanisms.
- Use geometric reasoning and constraint-based techniques.
Machine Learning and Data-Driven Methods
- Develop neural networks for accurate inverse kinematics mappings.
- Incorporate domain knowledge and physical constraints into learning processes.
Hybrid and Integrated Approaches
- Combine analytical, numerical, and machine learning techniques.
- Develop hierarchical frameworks for different problem aspects.
Application-Specific Optimizations
- Tailor techniques for specific domains like robotics and animation.
- Consider domain-specific constraints and performance requirements.
Evaluation and Benchmarking
- Create frameworks for assessing accuracy, robustness, and performance.
- Design standardized test cases and real-world experiments.
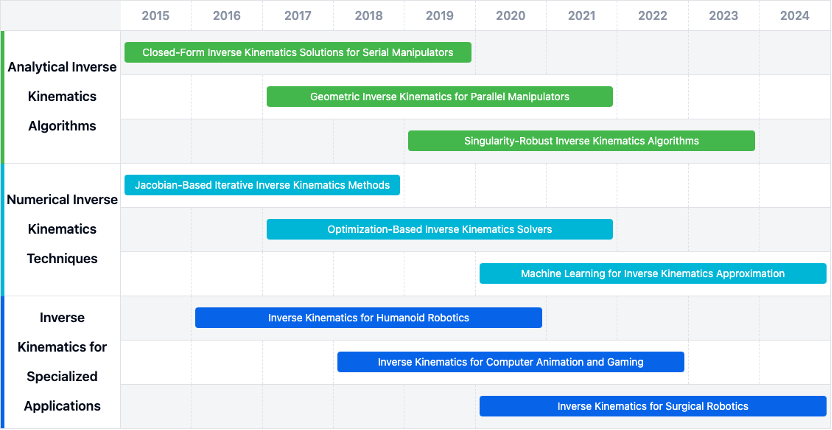
Technical Development Roadmap
Key Areas of Advancement
- Analytic Inverse Kinematics Algorithms: Closed-form solutions and singularity-robust solvers.
- Numerical Optimization Methods: Jacobian-based solvers, evolutionary algorithms, and machine learning models.
- Real-Time Computation Techniques: Efficient algorithms for low latency applications.
Main Player Analysis
Key Players and Focus
- Chinese Academy of Sciences: Hybrid kinematic mechanisms, sun-tracking algorithms, adaptive control strategies, beam pointing analysis, and kinematics analysis of parallel platforms.
- QUALCOMM Inc.: Advanced algorithms, sensor fusion techniques, and hardware solutions for motion tracking, gesture recognition, and spatial positioning.
- Intuitive Surgical Operations Inc.: Advanced control systems, kinematic models, and algorithms for precise positioning in surgical robotics.
- Zhejiang University: Motion planning for tomato harvesting manipulators, stiffness analysis for large aircraft components, and real-time inverse kinematics algorithms.
- Harbin Institute of Technology: Control algorithms, kinematic models, and hardware solutions for accurate motion control in various applications.
Current Technical Solution Overview
High Accuracy Positioning Techniques
- Inverse Kinematics Algorithms: Techniques for precise control of multi-link mechanisms.
- Sensor Fusion and Filtering: Combining data from multiple sensors for improved accuracy.
- Carrier-Phase Differential Techniques: RTK and PPP for centimeter-level positioning accuracy.
- Machine Learning and AI: Learning patterns and relationships from data to improve positioning accuracy.
- Cooperative and Collaborative Techniques: Sharing position information among multiple devices.
Inverse Kinematics for Positioning Accuracy
- Algorithms for Accurate Positioning: Solving inverse kinematics problems with high precision.
- Kinematic Modeling and Calibration: Accurate modeling and compensation for errors.
- Real-Time Kinematic Systems: Using GNSS for real-time, high-precision positioning.
- Machine Learning for Inverse Kinematics: Neural networks for solving kinematic problems.
- Positioning Accuracy Evaluation: Methods for evaluating and analyzing positioning accuracy.
Real-Time Kinematic Positioning Systems
- RTK Systems for High Accuracy: Centimeter-level positioning accuracy in real-time.
- Inverse Kinematics for Robotic Positioning: Determining joint angles for precise end-effector positioning.
- Integration of GNSS and Inertial Navigation: Continuous positioning during GNSS signal outages.
- Ambiguity Resolution Techniques: Efficiently resolving carrier phase ambiguities.
- Network RTK and Atmospheric Modeling: Enhancing positioning accuracy over large areas.
Low Power High Accuracy Positioning (LPHAP)
- Low-Power Techniques: Optimizing configurations and algorithms for energy efficiency.
- Inverse Kinematics for High Accuracy: Enhancing positioning accuracy in robotic systems.
- Accuracy Evaluation and Compensation: Measuring and compensating for positioning errors.
Kinematic Accuracy Measurement and Compensation
- Measurement Methods for Robotic Systems: Techniques for measuring kinematic accuracy.
- Compensation for Machine Tools: Improving accuracy in machine tools.
- Kinematic Positioning Systems: Using RTK, INS, and image-based positioning.
- State Estimation and Error Compensation: Improving accuracy in navigation and tracking.
Key Patent Interpretation
Patent Highlights
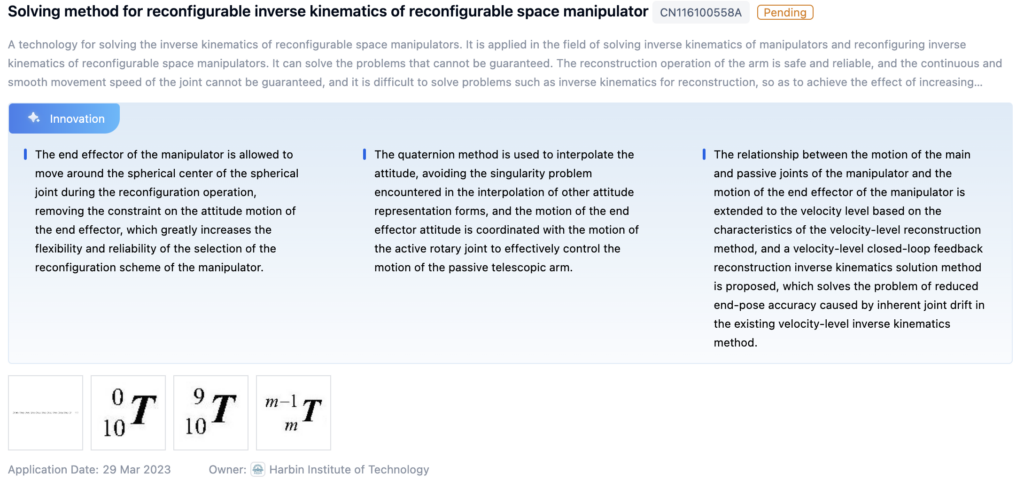
Patent 1: Solving Method for Reconfigurable Inverse Kinematics of Reconfigurable Space Manipulator
- Core Invention Points:
- Spherical joint flexibility for end-effector motion.
- Quaternion interpolation to avoid singularities.
- Velocity-level closed-loop feedback for accuracy.
Patent 2: Motion Cover Method for Linking Animation Data
- Core Invention Points:
- Extracting skeletal model data and converting to IK/FK.
- Determining parent and child joints for motion retargeting.
- Real-time motion transfer between characters.
Patent 3: Analytical Solution of Inverse Kinematics of Jointed Manipulator
- Core Invention Points:
- Establishing linkage coordinate system using D-H parameters.
- Calculating homogeneous coordinate transformation matrix.
- Solving rotation angle expressions for manipulator joints.
Possible Research Directions
- Inverse Kinematics Calculation Methods: Developing methods for high positioning accuracy.
- High Accuracy Positioning Systems: Designing systems for precise control in various applications.
- Integration of Kinematic Models and Positioning: Combining kinematic models with RTK or PPP.
- Low Power and Energy-Efficient Techniques: Achieving high accuracy with minimal power consumption.
If you want an in-depth research or a technical report, you can always get what you want in Eureka Technical Research. Try now!
