
Technical Background and Objectives
Background
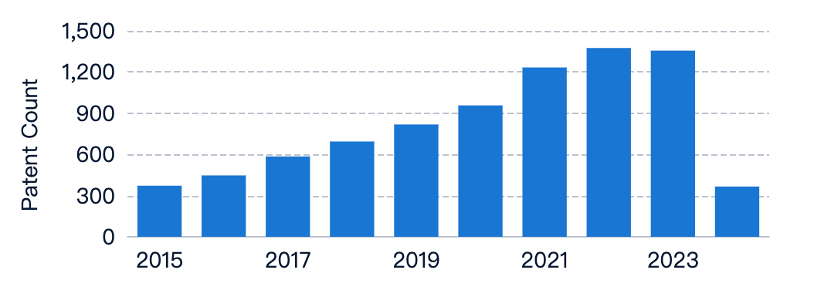
The field of inverse kinematics with the goal of improving accuracy has seen a steady increase in patent applications over the years. This upward trend indicates growing interest and research efforts. However, the number of related literature publications has shown fluctuations, suggesting that the focus might be more on applied research and commercialization rather than academic exploration. Factors such as industry demand, technological advancements, and research funding could influence these trends.
Objectives
The primary objective is to develop innovative techniques and algorithms that significantly improve the accuracy of inverse kinematics computations. By addressing challenges like numerical instabilities and singularities, the aim is to enhance the precision and robustness of inverse kinematics solutions, enabling more accurate control of robotic systems and more realistic animations in computer graphics.
To get a detailed scientific explanations of Inverse Kinematics, try Eureka.
Technical Current Status Analysis
Inverse Kinematics Overview
Inverse kinematics is crucial in robotics and computer animation, involving the calculation of joint angles or configurations to achieve a desired end-effector position and orientation. Accurate solutions are essential for applications like industrial robotics, medical robotics, CAD, and motion capture.
Applications and Impact:
- Industrial Robotics: Essential for tasks like pick-and-place operations, welding, and assembly.
- Medical Robotics: Critical for precise positioning in surgical robots and rehabilitation devices.
- CAD and Computer Animation: Vital for creating realistic motions for virtual characters and models.
- Motion Capture and VR: Used to map real-world movements onto virtual characters, enhancing realism.
Technical Challenges:
- Redundancy and Multiple Solutions: Choosing the optimal solution among multiple valid configurations.
- Singularities and Numerical Instabilities: Avoiding configurations where equations become ill-conditioned.
- Computational Complexity: Achieving real-time performance while maintaining accuracy.
- Modeling Inaccuracies and Calibration: Reducing discrepancies between calculated and actual joint angles.
- Environmental Factors: Compensating for external disturbances and inaccuracies in real-world applications.
Technological Paths:
- Advanced Numerical Methods: Techniques like global optimization and parallel computing to improve accuracy and performance.
- Improved Modeling and Calibration: Enhancing kinematic models and calibration procedures with advanced sensors and machine learning.
- Sensor Fusion and Feedback Control: Integrating multiple sensor modalities for robust and accurate solutions.
- Hardware Advancements: Specialized architectures like FPGAs and ASICs for high performance.
- Simulation and Virtual Testing: Using simulation tools to validate solutions before real-world deployment.
Research Content
Research Objectives
Develop innovative techniques and algorithms to improve the accuracy of inverse kinematics computations.
Research Direction and Focus
Numerical Optimization Techniques
- Develop advanced numerical optimization techniques for inverse kinematics.
- Investigate and adapt state-of-the-art algorithms to handle singularities and redundancy.
Analytical and Geometric Approaches
- Explore closed-form solutions and hybrid methods combining analytical and numerical techniques.
- Leverage geometric insights to reduce search space and improve efficiency.
Constraint Handling and Redundancy Resolution
- Develop robust techniques for handling constraints and resolving redundancy.
- Explore optimization and machine learning methods for constraint handling.
Application-Specific Adaptations
- Tailor techniques to specific domains like robotics, animation, and biomechanics.
- Investigate domain-specific requirements and constraints for improved solutions.
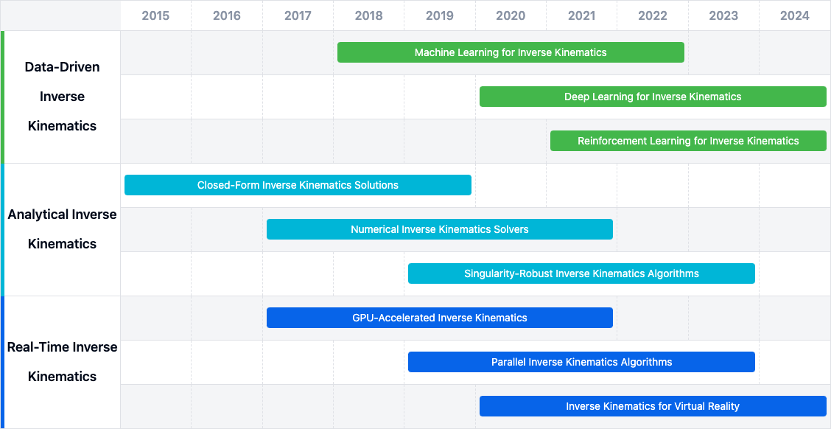
Technical Development Roadmap
Key Areas of Advancement
- Analytic Inverse Kinematics Algorithms: Developing closed-form solutions and singularity-robust solvers.
- Numerical Optimization Methods: Leveraging machine learning and parallel computing for real-time solutions.
- Real-Time Computation Techniques: Developing efficient algorithms for applications requiring low latency.
Main Player Analysis
Key Players and Focus
- Beihang University: Focus on algorithm development and calibration techniques.
- QUALCOMM Inc.: Research in mobile devices, AR, and computer vision applications.
- Harbin Institute of Technology: Emphasis on robotics, control systems, and computational methods.
- Shanghai Jiao Tong University: Research in robotics, manufacturing automation, and aerospace engineering.
Current Technical Solution Overview
Inverse Kinematics Solution Methods
- Analytical Approaches: Deriving closed-form solutions for specific robotic manipulators.
- Numerical and Iterative Methods: Optimization algorithms like gradient descent and Newton-Raphson.
- Machine Learning Approaches: Training neural networks to approximate inverse kinematics solutions.
- Application-Specific Solutions: Tailored methods for different robot configurations and tasks.
- Real-Time Solvers: Techniques for fast and efficient solutions in real-time applications.
Kinematic Accuracy Measurement and Calibration
- Measurement Methods: Using laser interferometers and vision-based systems.
- Calibration Techniques: Identifying and compensating for kinematic parameter errors.
- Error Modeling and Compensation: Developing models to describe and compensate for kinematic errors.
- Performance Assessment: Evaluating measurement systems and validating accuracy.
- Real-Time Monitoring and Correction: Continuous adjustment of kinematic parameters during operation.
Inverse Kinematics for Character Animation and Simulation
- Machine Learning Models: Generating accurate models for character animation.
- Blending and Optimization: Combining multiple solutions for natural animations.
- Data-Driven Approaches: Using real-world data for realistic movements.
- Efficient Computation: Optimizing algorithms for real-time applications.
- Task-Specific Techniques: Developing methods for specific animation tasks.
Kinematic Singularity and Joint Limit Compensation
- Singularity Avoidance Techniques: Identifying and avoiding singular configurations.
- Error Compensation and Calibration: Improving accuracy through error compensation.
- Joint Limit Handling: Managing joint limits and singularities.
- Kinematic Modeling and Analysis: Enhancing modeling techniques for better accuracy.
- Trajectory Planning: Planning trajectories to avoid singularities and ensure precision.
Inverse Kinematics for Motion Tracking and Analysis
- Machine Learning Models: Training models for accurate motion tracking.
- Character Animation and Motion Retargeting: Generating realistic animations and retargeting motions.
- Robotic and Surgical Applications: Accurate control for robotic systems and surgical tools.
- Motion Tracking with Visual Information: Combining kinematics with visual data.
- Calibration and Accuracy Evaluation: Testing and improving motion tracking systems.
Key Patent Interpretation
Patent Highlights
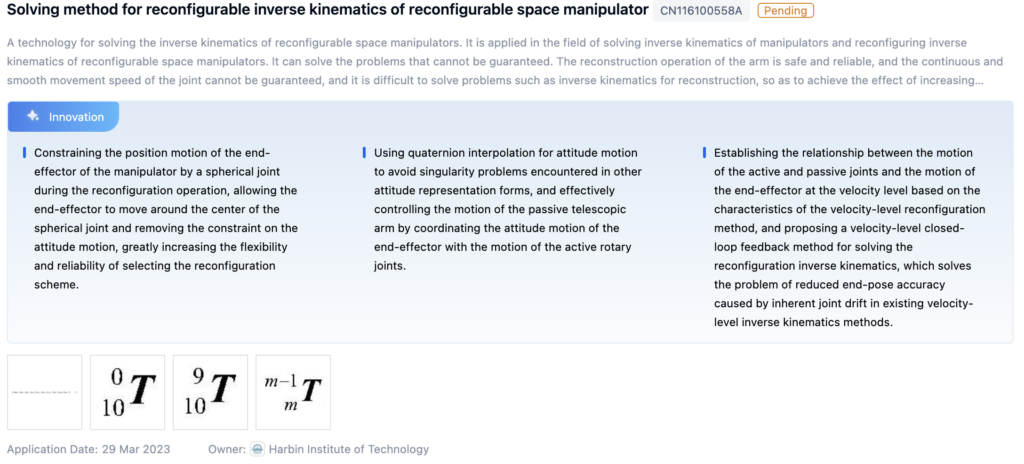
Patent 1: Solving Method for Reconfigurable Inverse Kinematics of Space Manipulator
- Core Invention Points:
- Constraining end-effector motion with a spherical joint.
- Using quaternion interpolation for attitude motion.
- Establishing a velocity-level closed-loop feedback method.
Patent 2: Inverse Kinematics Solving Method of Surgical Actuator
- Core Invention Points:
- Combining position decomposition and algebraic methods.
- Simplifying complex kinematic models.
- Dividing the solution model into position and attitude modules.
Patent 3: Method for Finding Analytical Solution of Inverse Kinematics of Jointed Manipulator
- Core Invention Points:
- Rapidly obtaining unique analytical solutions for six-degree-of-freedom manipulators.
- Establishing linkage coordinate systems and solving rotation angle expressions.
Possible Research Directions
- Machine Learning and Neural Network Approaches: Developing accurate models for inverse kinematics.
- Optimization and Clustering Algorithms: Enhancing the accuracy of kinematic solutions.
- Kinematic Modeling and Parameter Determination: Improving modeling techniques for better accuracy.
- Motion Retargeting and Animation: Accurate mapping of input motions for realistic animations.
- Kinematic Accuracy Testing and Error Compensation: Developing methods for testing and improving accuracy.
If you want an in-depth research or a technical report, you can always get what you want in Eureka Technical Research. Try now!

