Mechanical arm positioning and obstacle avoiding system in Tokamak cavity
A technology of tokamak cavity and mechanical arm, which is applied in the system field of mechanical control technology, can solve the problems of high technical requirements, difficulty in positioning and obstacle avoidance of the mechanical arm, and achieve the effect of intuitive visual information and convenient monitoring
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Example Embodiment
[0015] The embodiments of the present invention are described in detail below. This embodiment is based on the technical solution of the present invention, and provides detailed implementation and specific operation procedures, but the protection scope of the present invention is not limited to the following embodiments.
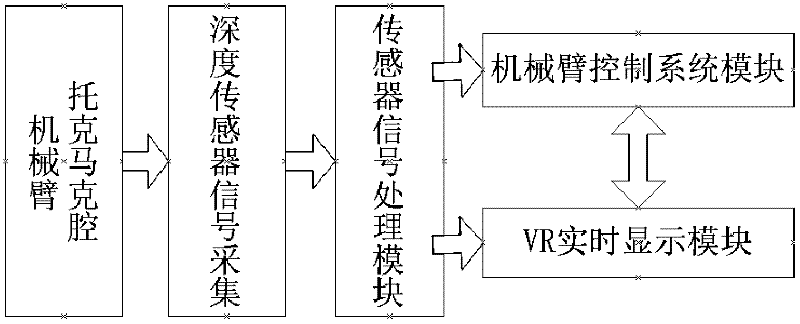
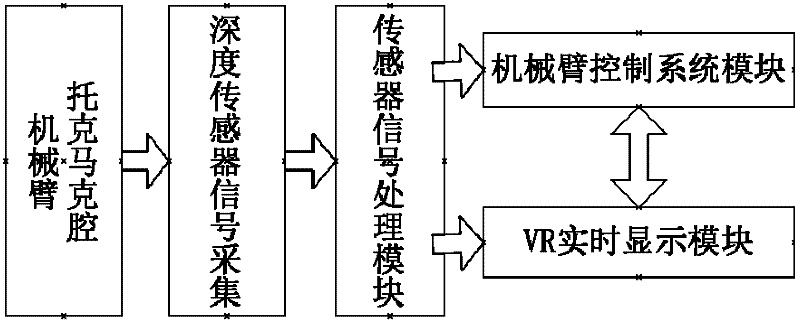
[0016] Such as figure 1 As shown, this embodiment provides a robotic arm positioning and obstacle avoidance system in a Tokamak cavity based on depth sensor information, including four modules: sensor signal acquisition module, sensor signal processing module, robotic arm control system module, VR Real-time display module.
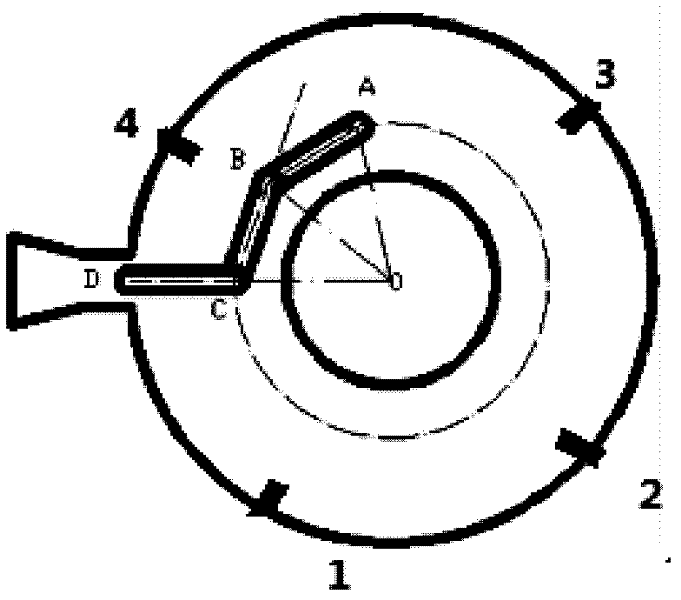
[0017] The sensor signal acquisition module collects signals from 4 depth sensors installed in the Tokmak cavity (such as figure 2 Shown in 1-4), the output is sent to the sensor signal processing module for processing. In the embodiment, factors such as cost performance are comprehensively considered, and the interference of the complex el...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap