Moving-iron cableless six-freedom-of-degree magnetic levitation moving platform
A motion platform, degree of freedom technology, applied in electrical components, semiconductor/solid-state device manufacturing, circuits, etc., can solve problems such as cable interference movement, light source influence, etc., achieve high-precision measurement, improve control bandwidth, and improve anti-interference ability Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
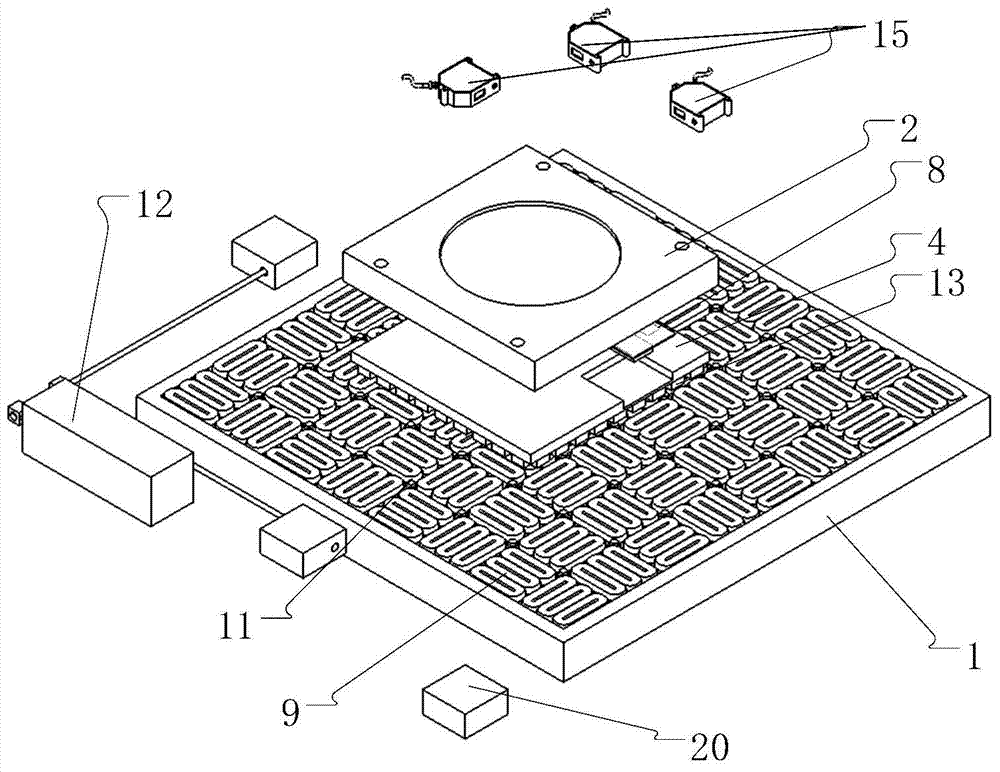
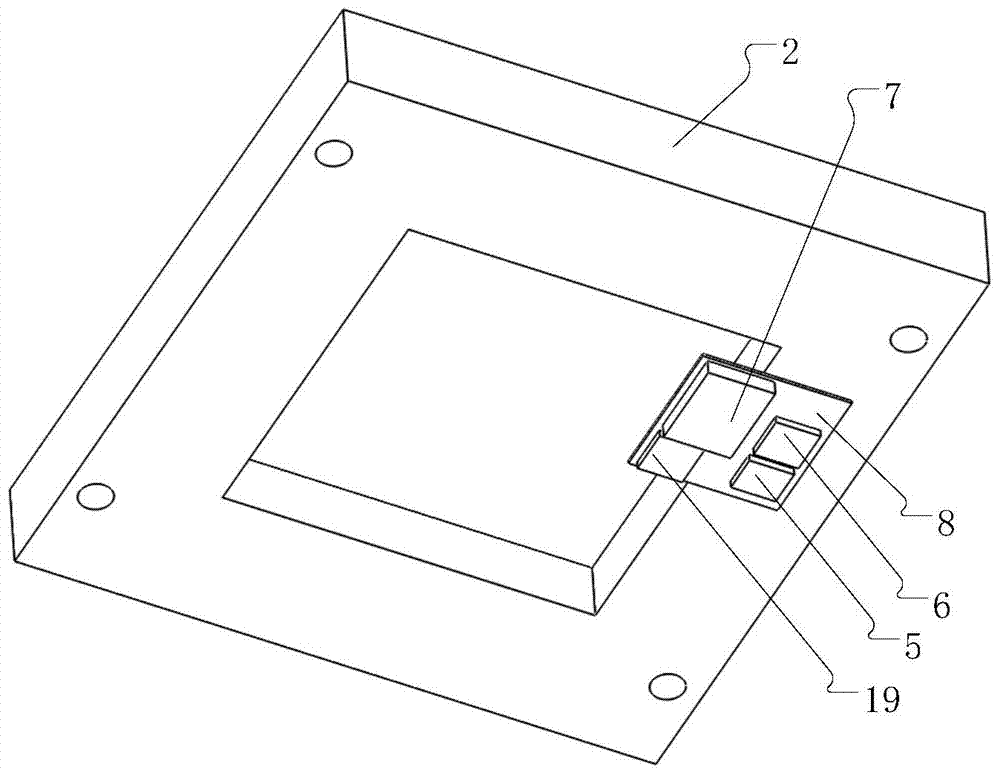
[0022] figure 1 , figure 2 A three-dimensional structure diagram of a moving-iron type cable-free six-degree-of-freedom maglev motion platform provided for the invention, the moving-iron type cable-free six-degree-of-freedom maglev motion platform includes a base 1, a stator, a mover, and a carrier Platform 2 and measuring system, described mover is made up of halbach permanent magnet array 13 and magnetic steel back plate 4; Described stator is the coil array 14 that is arranged by multiple groups of coil units 9; Described measuring system Including a laser interferometer measurement system 12, an eddy current sensor 11 and a laser triangulation sensor 15; a three-axis gyroscope 5 and a three-axis accelerometer are also arranged in the groove between the mover and the slide table 2 6. Power supply module 7 and wireless signal output module 19; a wireless signal receiving module 20 is set on the stator, the three-axis gyroscope 5, three-axis accelerometer 6 and power supply...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com