

Origin precise positioning system and positioning method based on low-precision multiple sensor fusion
A precise positioning and sensor technology, applied in the direction of control using feedback, can solve the problems of insufficient positioning accuracy, high cost, and difficult assembly, and achieve the effect of reducing equipment cost, reducing equipment cost, and reducing assembly difficulty.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
specific Embodiment approach 1
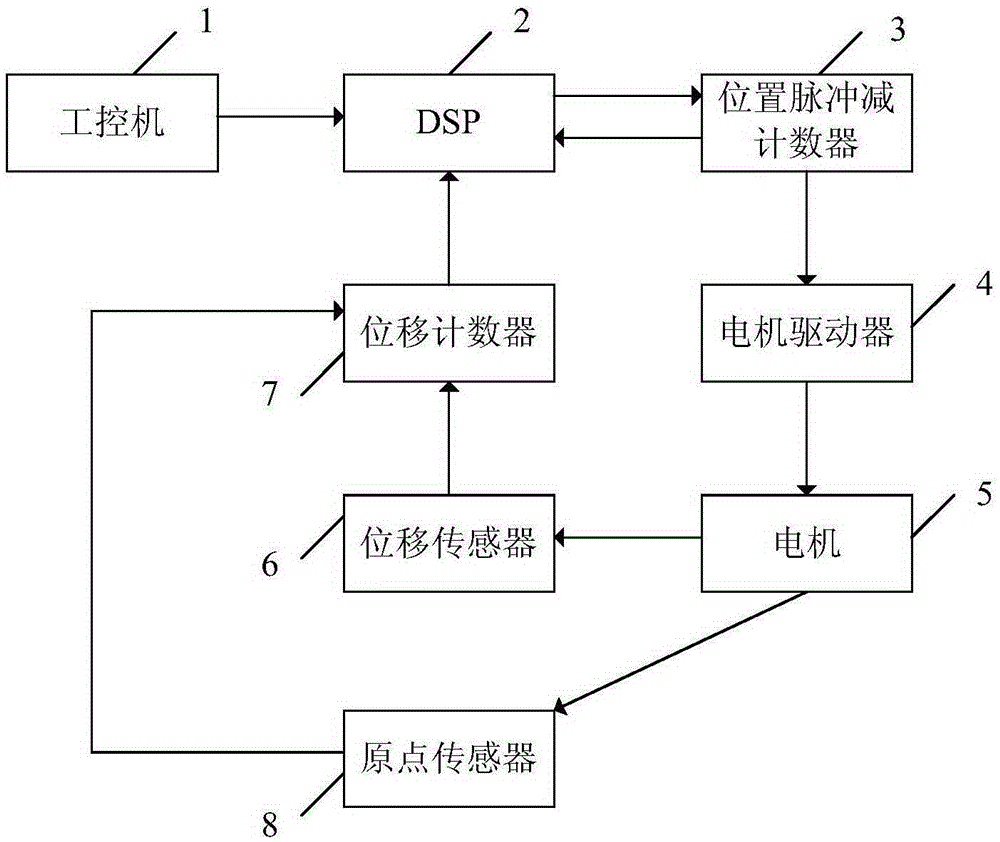
[0025] Specific implementation mode one: the following combination figure 1 Describe this embodiment, the low-precision multi-sensor fusion origin precise positioning system described in this embodiment, it includes industrial computer 1, DSP2, position pulse down counter 3, motor driver 4, motor 5, moving mechanism, displacement sensor 6 , displacement counter 7 and origin sensor 8;
[0026] The position command signal output terminal of the industrial computer 1 is connected to the position command signal input terminal of DSP2, and the total number of pulses to be sent by DSP2 is written into the position pulse decrement counter 3, and the pulse signal output terminal of the DSP2 is connected to the pulse signal input of the position pulse decrement counter 3 end, the state signal output end of the position pulse decrement counter 3 is connected to the state signal input end of DSP2, the position pulse decrement counter 3 is used to control the total number of position puls...
specific Embodiment approach 2
[0033] Embodiment 2: This embodiment further limits the low-precision multi-sensor fusion origin precise positioning system described in Embodiment 1. In this embodiment, the displacement sensor 6 is realized by a magnetic scale or a grating scale.
specific Embodiment approach 3
[0034] Specific implementation mode three: the following combination figure 1 and figure 2 Describe this embodiment, the origin precise positioning method of low-precision multiple sensor fusion described in this embodiment, this method is realized by the origin precise positioning system of low-precision multiple sensor fusion, the low-precision multiple sensor fusion The origin precise positioning system includes industrial computer 1, DSP2, position pulse subtraction counter 3, motor driver 4, motor 5, moving mechanism, displacement sensor 6, displacement counter 7 and origin sensor 8;
[0035] The position command signal output terminal of the industrial computer 1 is connected to the position command signal input terminal of DSP2, and the total number of pulses to be sent by DSP2 is written into the position pulse decrement counter 3, and the pulse signal output terminal of the DSP2 is connected to the pulse signal input of the position pulse decrement counter 3 end, th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More