Quadruped robot with flexible joints
A quadruped robot and flexible joint technology, applied in the field of robotics, can solve problems such as practical application limitations of joints, affect the performance of quadruped robots, complex structure, etc., and achieve the effects of large joint range of motion, improved service life, and low energy consumption.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
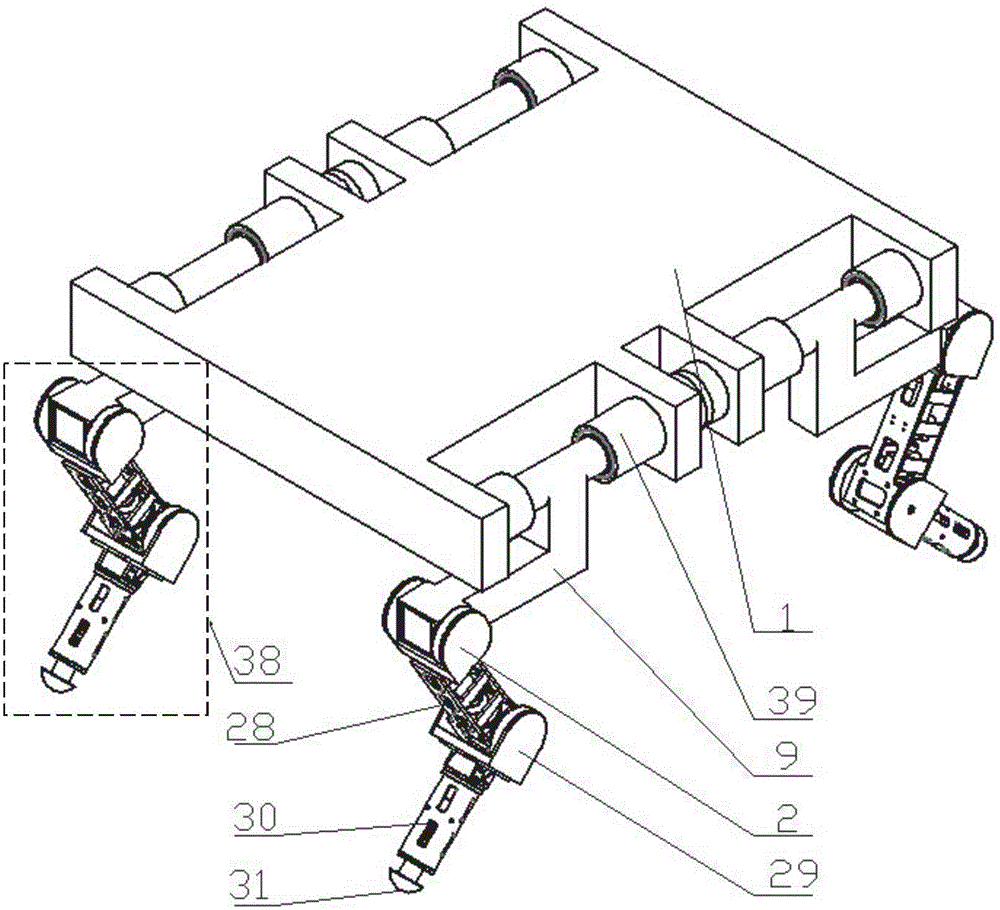
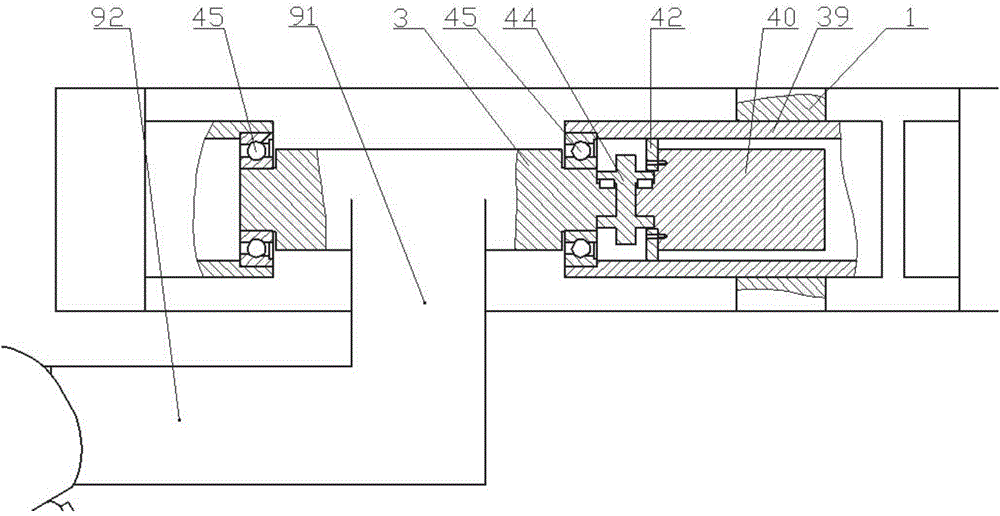
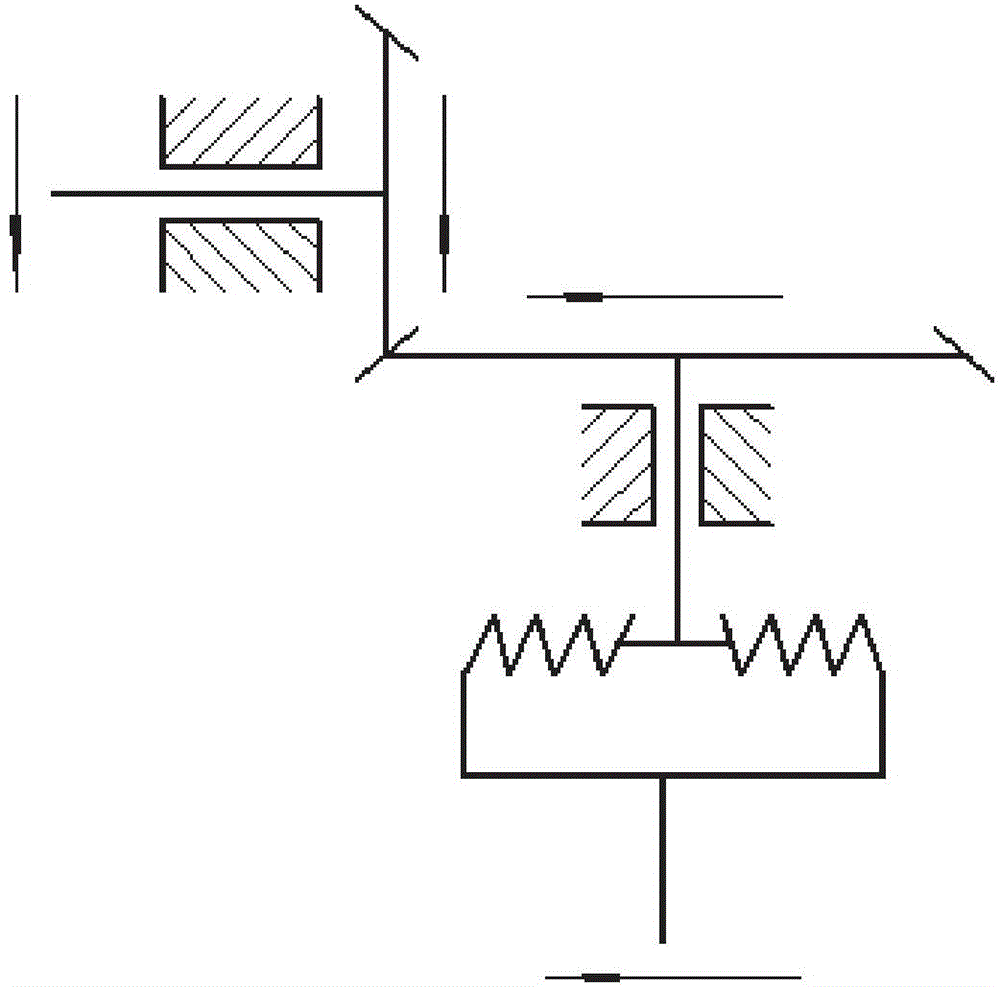
[0031] A kind of quadruped robot with flexible joints designed by the present invention (referred to as robot, see figure 1 ), it is characterized in that the robot includes a frame 1 and four mechanical legs 38; the mechanical legs 38 are connected to both sides of the frame by outward swing joints. Wherein, the four mechanical legs 38 adopt an inner knee-elbow symmetrical structure; each mechanical leg 38 is composed of a swing joint, a hip joint frame 9, a hip joint 2, a thigh 28, a knee joint 29, a calf 30 and a foot 31 in sequence. . The hip joint 2 and the knee joint 29 have active flexibility (see the schematic diagram of the transmission principle image 3 , see the structure Figure 4 , Figure 5 , Figure 6 ), the hip joint 2 and the knee joint 29 both include a flexible joint body with active flexibility of the same structure, and the knee joint 2 and the hip joint 29 are driven by the hip joint motor 5 and the knee joint motor respectively.
[0032] The side o...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap