A Formal Analysis Method of Manipulator Kinematics
An analysis method and a technology of a manipulator, applied in the field of manipulators, can solve problems such as complex calculations and inaccurate results
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
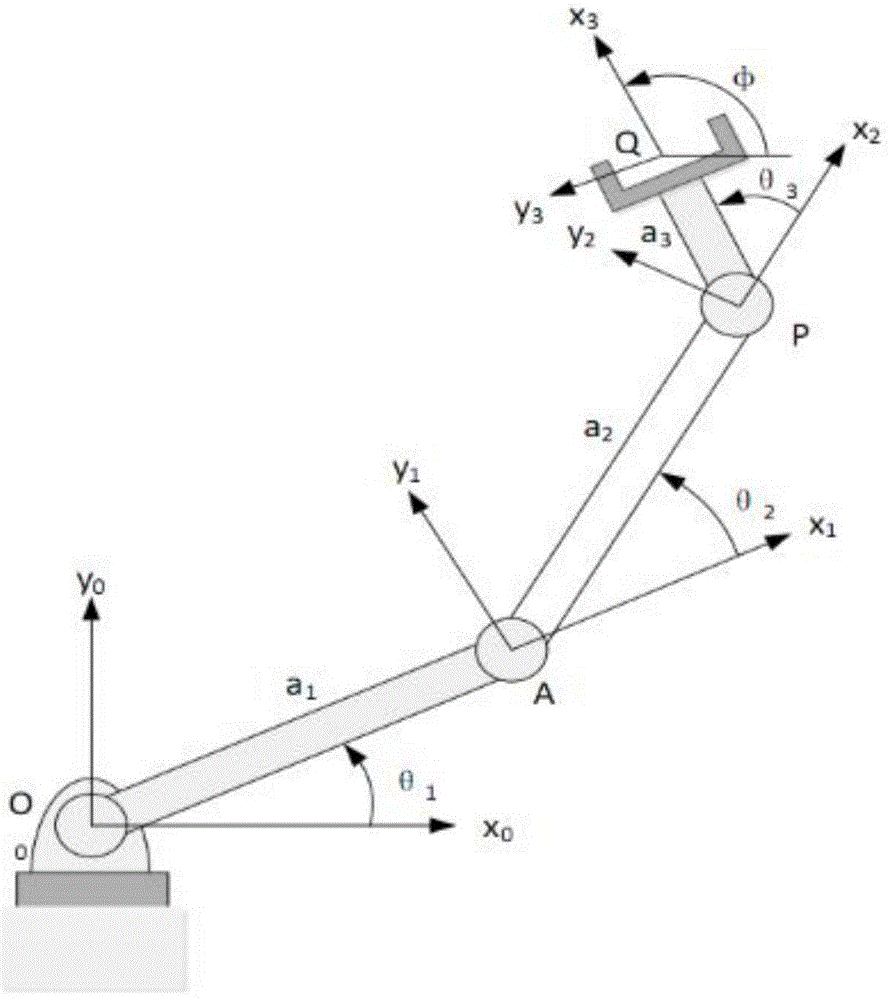
[0102] In this embodiment, the formalized analysis method of the kinematics of the manipulator in this application is specifically described by taking a plane 3-DOF manipulator as an example.
[0103] like figure 1 The D-H parameters of the shown planar 3-DOF manipulator are shown in Table 1:
[0104] Table 1 D-H parameters of the planar 3-DOF manipulator
[0105] joint
α i
a i
d i
θ i
1
0
a 1
a 1
θ 1
2
0
a 2
a 2
θ 2
3
0
a 3
a 3
θ 3
[0106] In Table 1, α i Indicates the torsion angle between the rotation axes of each revolving pair, a i Indicates the offset distance (connecting rod length) between two adjacent revolving pairs, d i Indicates the distance between the vertical feet of the common normal between the rotation axes of two adjacent revolving pairs, θ i Indicates the angle of rotation of the revolving joint.
[0107] Determine the screw coordinates of each rotary ...
Embodiment 2
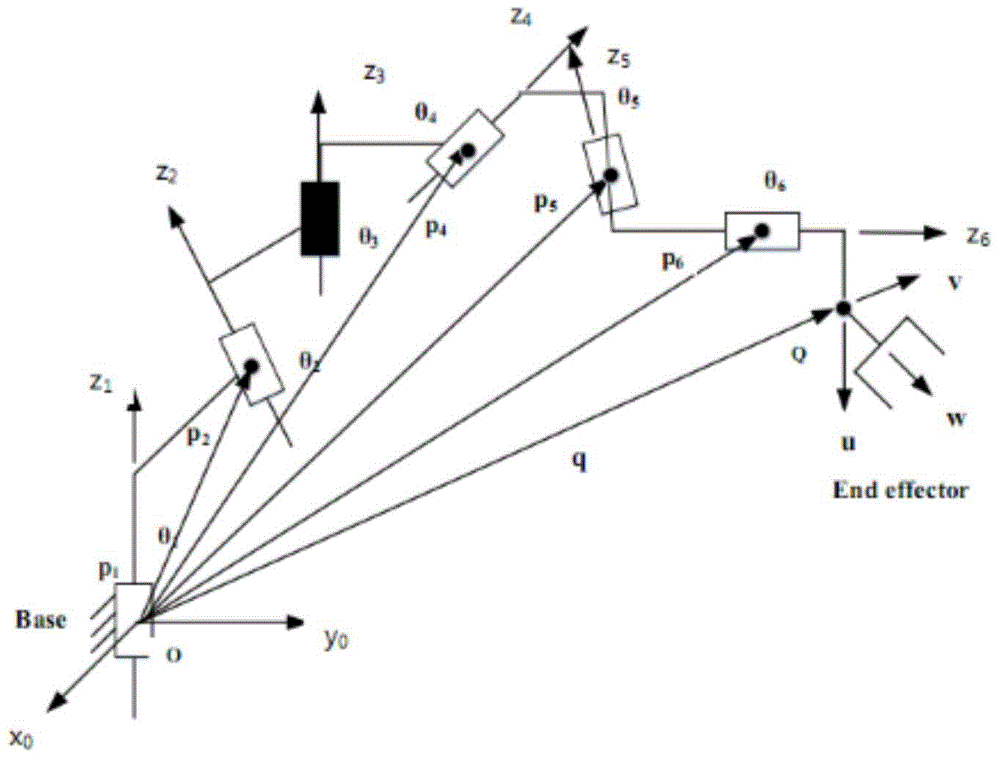
[0163] In this embodiment, a singular configuration of a 6R robot is used for judgment
[0164] image 3 It shows a state diagram of a 6R robot in a singular configuration, in which the black-marked rotary joint is in a singular configuration, and the mechanism has the following special parameters:
[0165] joint
z i
θ i
d i
1
(0,0,1) T
any angle
1
2
(0,1,0) T
0
1
3
(0,0,1) T
any angle
1
4
Take any
any angle
1
5
Take any
any angle
1
6
Take any
any angle
1
[0166] Table 2 A singular configuration parameter of the 6R robot
[0167] Table 2, z i respectively represent the rotation axes of each joint of the mechanism, θ i Indicates the rotation angle of each joint of the mechanism,
[0168] d i Indicates the connecting rod length.
[0169]
[0170] in, represents the primordial part of the spinor, Represents the even part of the screw, i=1,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com