Extraction device and method
A technology for extracting equipment and equipment, applied in character and pattern recognition, image enhancement, instruments, etc., can solve problems such as inability to extract feature points
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
no. 1 example
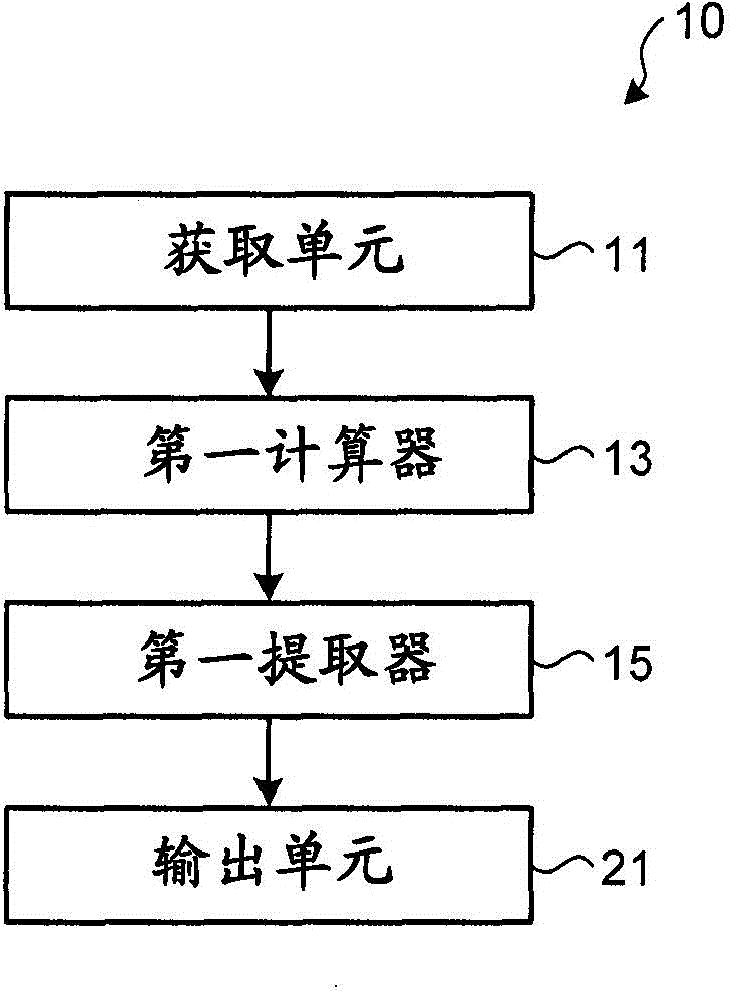
[0034] figure 1 is a configuration diagram showing an example of the extraction device 10 according to the first embodiment. Such as figure 1 As shown, the extraction device 10 includes an acquisition unit 11 , a first calculator 13 , a first extractor 15 and an output unit 21 . The acquisition unit 11 may be realized by causing a processing device such as a central processing unit (CPU) to execute a program (that is, by software), by hardware such as an integrated circuit (IC), or by a combination of software and hardware. A first calculator 13 , a first extractor 15 and an output unit 21 .
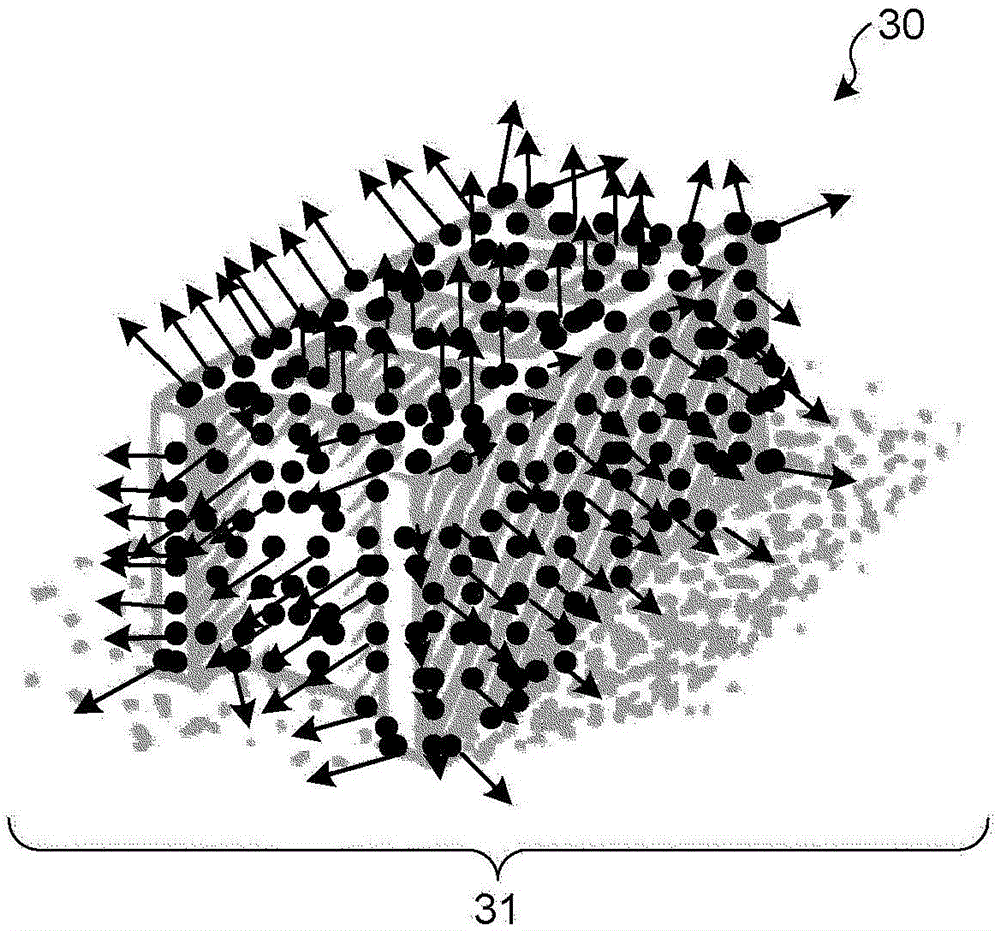
[0035] The acquisition unit 11 acquires point cloud data, which is a set of points including three-dimensional coordinates on the object surface and normal vectors perpendicular to the object surface at the three-dimensional coordinates.
[0036] The three-dimensional coordinates are preferably three-dimensional position coordinates arranged in a three-dimensional Cartesian coordinate...
no. 2 example
[0088] In the second embodiment, an example is shown in which feature points are extracted so that non-feature points as noise are not included. In the following, differences from the first embodiment will be mainly described, and components having similar functions to those in the first embodiment will be indicated with the same names and reference numerals as those in the first embodiment, and descriptions of these components will not be repeated. description of.
[0089] Figure 12 is a configuration diagram showing an example of the extraction device 110 according to the second embodiment. Such as Figure 12 As shown, the extraction device 110 of the second embodiment differs from the first embodiment in the second calculator 117 and the second extractor 119 .
[0090] Figure 13 is a diagram showing an example in which the feature point group data 141 at a part of the object 30 is extracted by the first extractor 15 according to the second embodiment. exist Figure ...
no. 3 example
[0111] In the third embodiment, an example in which extracted feature points are output for display will be described. In the following, differences from the first embodiment will be mainly described, and components having similar functions to those in the first embodiment will be denoted by the same names and reference numerals as those in the first embodiment, and descriptions of these components will not be repeated .
[0112] Figure 18 is a configuration diagram showing an example of the extraction device 210 according to the third embodiment. Such as Figure 18 As shown, the extraction device 210 according to the third embodiment differs from the first embodiment in the display 223 .
[0113] The display 223 can be realized by a display device such as a liquid crystal display, for example.
[0114] The output unit 21 outputs one or more points (feature point group data) extracted by the first extractor 15 to the display 223 for display. For display by the display 22...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com