Foot type robot foot palm quick-exchanging mechanism
A robot and sole technology, applied in the field of robotics, to achieve the effect of a simple overall structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Example Embodiment
[0008] The specific implementation of the present invention will be described in detail below with reference to the drawings and technical solutions.
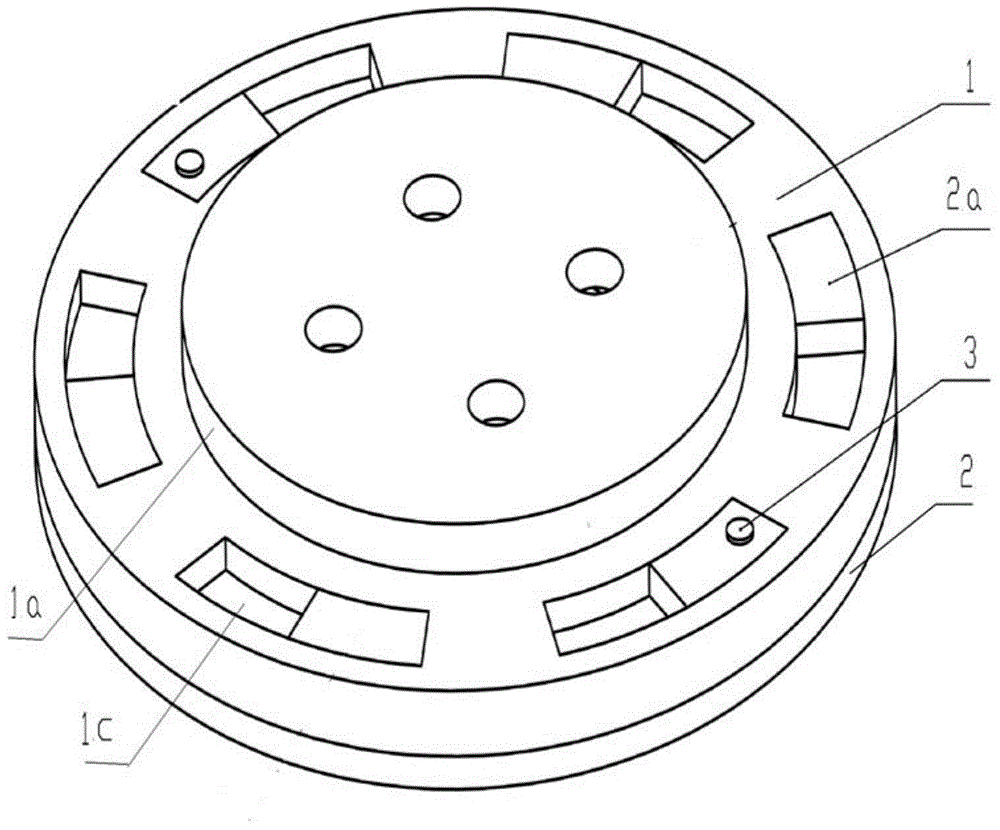
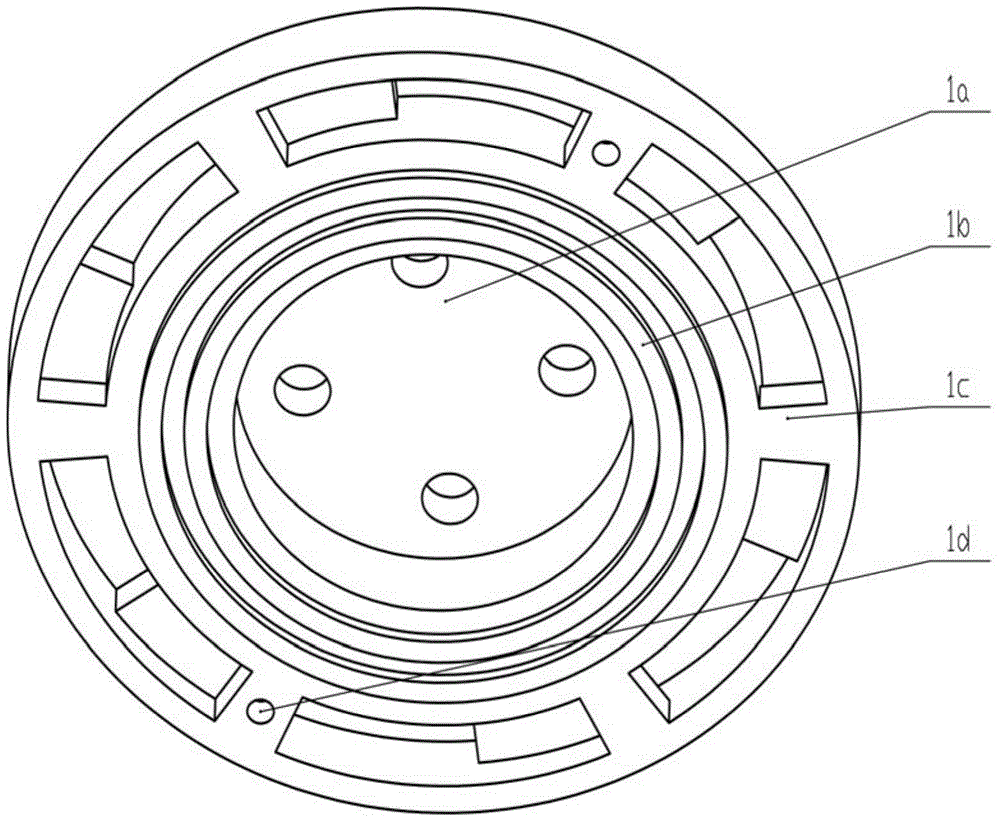
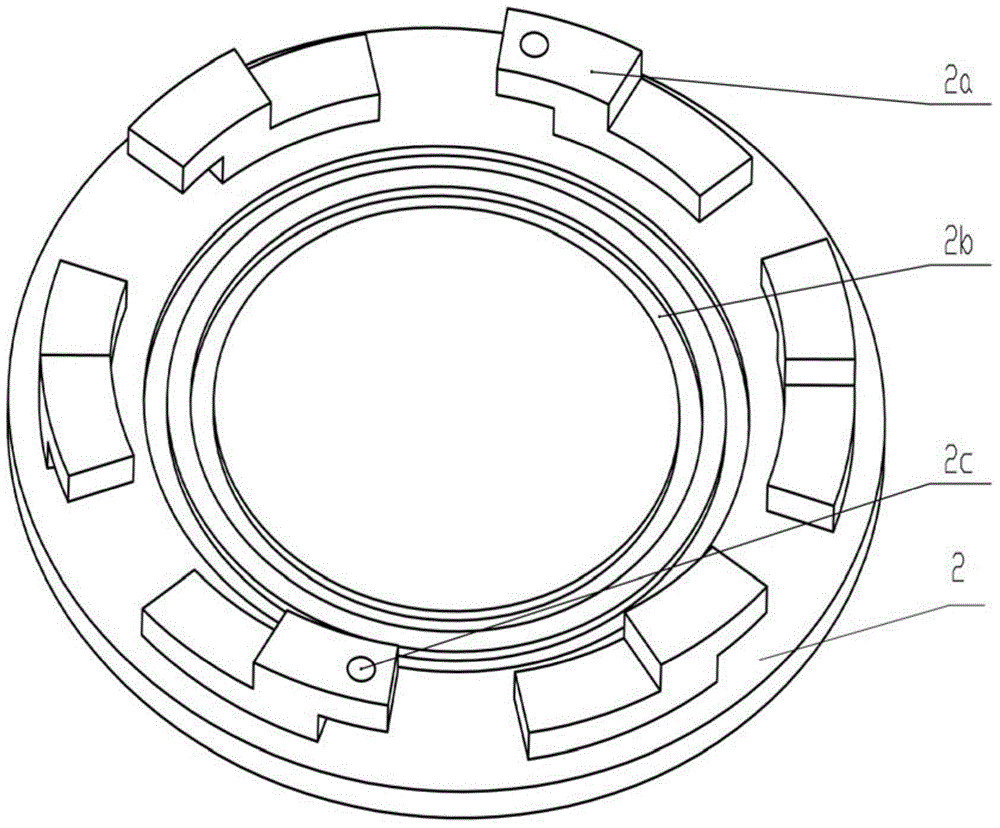
[0009] The foot-type robot's plantar quick-change mechanism is composed of plantar adapter plate 1, foot bottom plate 2, positioning pin 3, as attached figure 1 , 2 , 3 shown. The connecting flange 1a of the sole connecting plate 1 is evenly distributed with four through holes, and bolts are used to connect the sole connecting plate 1 with the foot through the four through holes. The plantar connecting plate 1 has six grooves 1c uniformly distributed in the circumferential direction, two pin holes 1d are provided on the grooves 1c, and the bottom surface of the plantar connecting plate 1 has two convex ribs 1b. There are six buckles 2a uniformly distributed in the circumferential direction of the sole plate 2, two sole plate pin holes 2c on the buckles 2a, two grooves 2b on the sole plate 2, and different patterns are designed on ...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap