

Automatic encoding method for deep space exploration autonomous task planning constraint reasoning
An autonomous task and deep space exploration technology, applied in the field of aerospace deep space exploration, can solve the problems of inconvenient information input and output, heavy manual coding workload, complex action relationship, etc., meet real-time requirements, and facilitate later transplantation and Maintain, avoid the effects of the reasoning process
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0041] In order to better illustrate the purpose and advantages of the present invention, the content of the invention will be further described below in conjunction with the accompanying drawings and examples.
[0042] 1. Establishment of detector system model and its constraint model.
[0043] The present invention uses the planetary surface sampling task as an example to illustrate the working process of the automatic coding method for deep space exploration autonomous task planning constraint reasoning. The model file for the planetary surface sampling mission is as follows:
[0044]
[0045]
[0046] The problem file looks like this:
[0047]
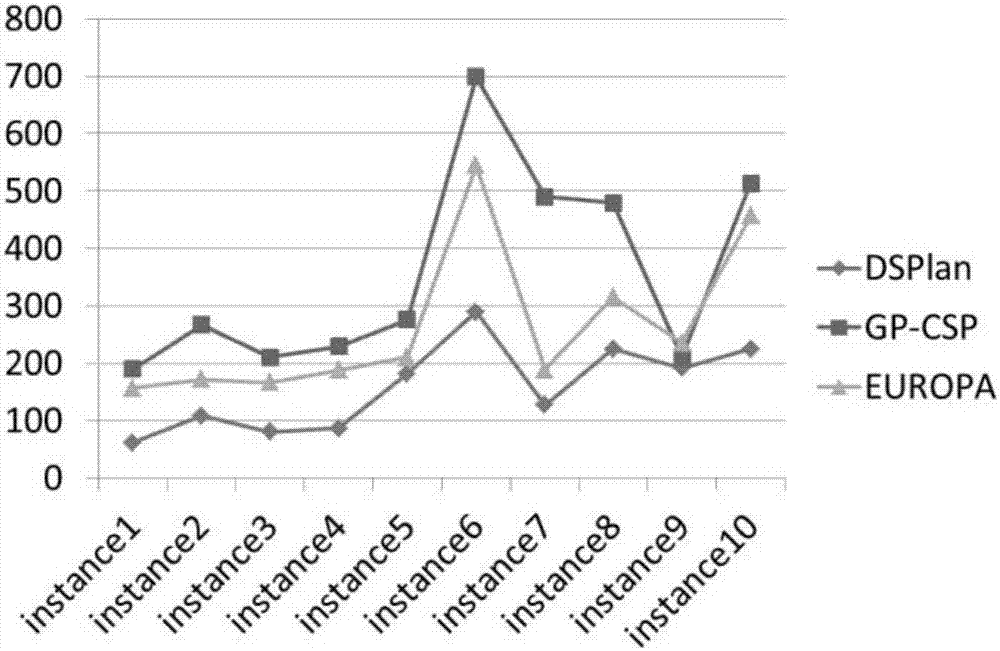
[0048] 2. The autonomous task planning method of this embodiment and the autonomous task planning method of EUROPA and GP-CSP are respectively used for task planning, and the beneficial effects of this embodiment are described.
[0049] Step 1, establish the system model of the deep space detector.
[0050] The sampling...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More