Automatic navigation trolley system based on convolutional neural network and trolley route-following method
A technology of convolutional neural network and automatic navigation car, which is applied in the directions of road network navigator, navigation, surveying and mapping, and navigation, etc., can solve the problems of inconvenient promotion, low space reuse rate, affecting the efficiency of line tracking, etc. Reaction speed and driving speed, high R&D depth and market prospects, the effect of improving recognition accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
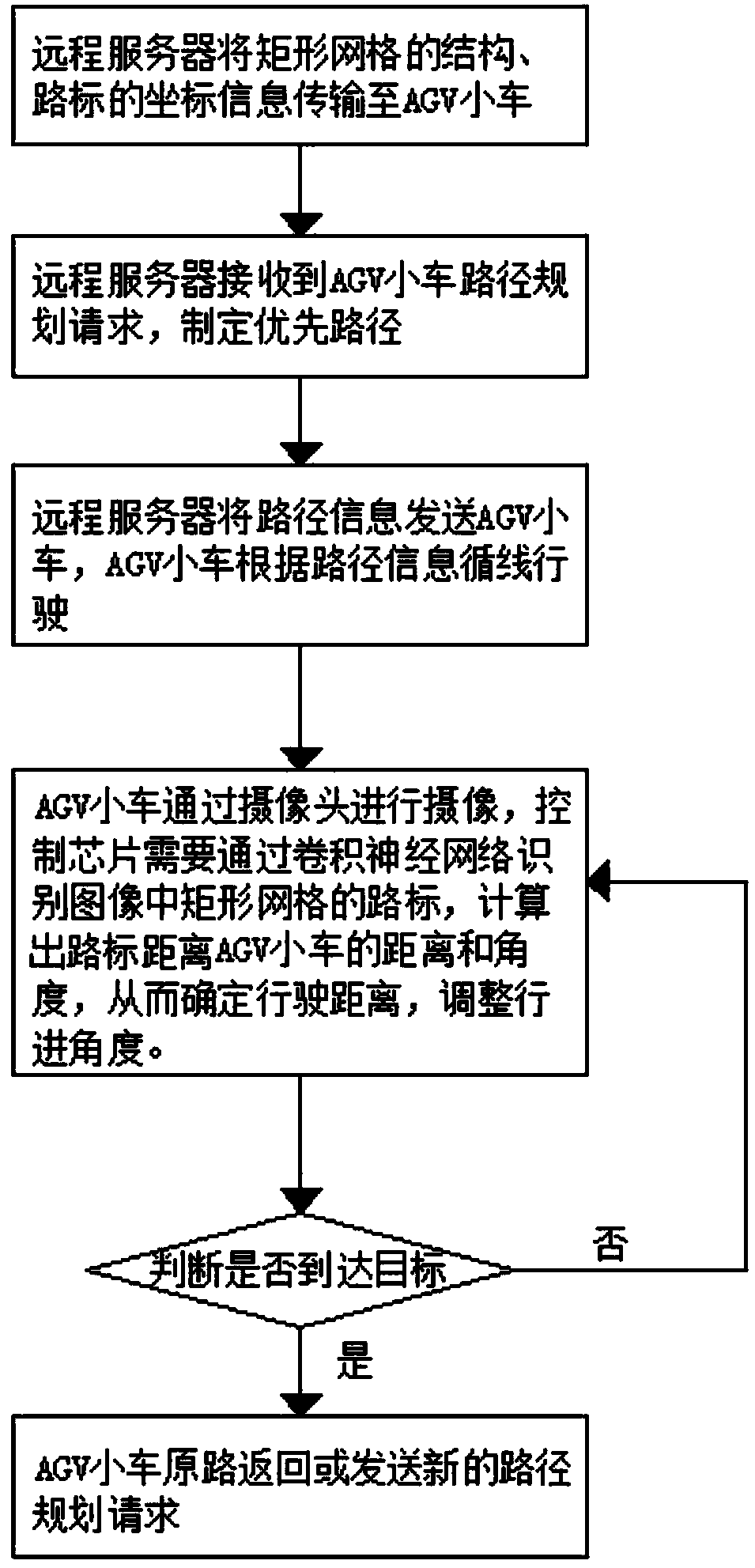
[0038] The automatic navigation car system based on the convolutional neural network in this embodiment includes an AGV car, a guiding mechanism and a remote server.
[0039] The AGV car is provided with a camera and a control chip containing a convolutional neural network model connected to the camera; the AGV car is provided with one or more cameras, and the cameras are arranged with the center line in the longitudinal symmetrical section of the AGV car as a symmetrical line.
[0040] Such as figure 1 As shown, the guiding mechanism includes a rectangular grid formed by several horizontal lines and vertical lines arranged on the road surface, and each intersection point of the rectangular grid is provided with non-repeating road signs, and the position of the road marks is the coordinate information of the road marks. The coordinate information of each landmark is different. Road signs are rectangular stickers. The center point of each signpost coincides with the intersect...
Embodiment 2
[0063] The automatic navigation car system and the car line following method in this embodiment are generally the same as those in Embodiment 1, the difference lies in the selection of the priority route in step 2 of the car line following method.
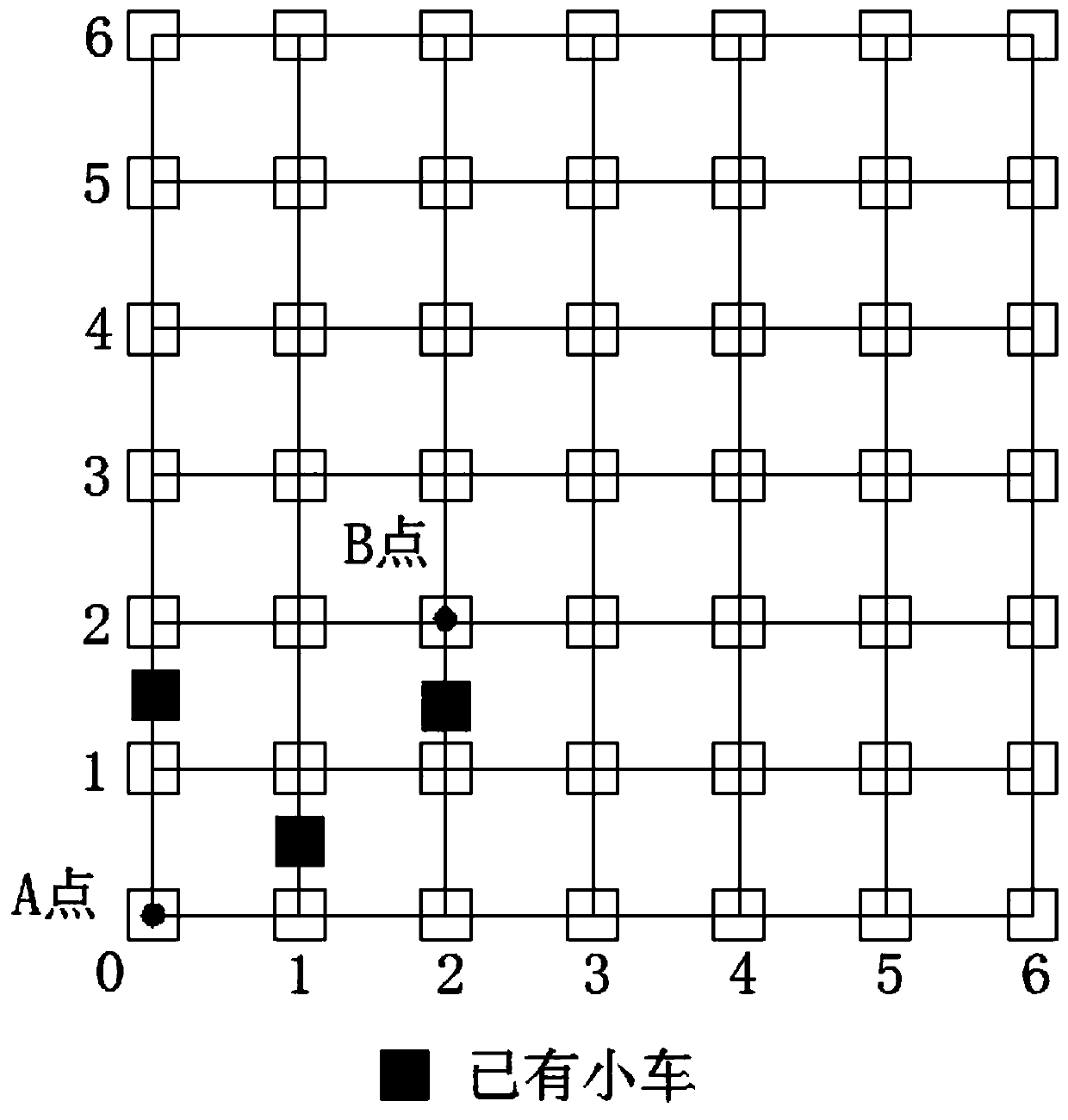
[0064] In step 2, the remote server receives the AGV car path planning request, according to the real-time position information of all AGV cars in the rectangular grid on the road (refer to Figure 4 ), calculate multiple candidate paths for the AGV car from the starting point A to the target point B, including: Path 1: (0,0)—(0,1)—(0,2)—(1,2)— (2,2); Path 2: (0,0)—(0,1)—(1,1)—(2,1)—(2,2); Path 3: (0,0)—(0 , 1)—(1,1)—(1,2)—(2,2); Path 4: (0,0)—(1,0)—(2,0)—(2,1)—( 2, 2); Path 5: (0, 0)—(1, 0)—(1, 1)—(2, 1)—(2, 2); Path 6: (0, 0)—(1, 0)—(1,1)—(1,2)—(2,2); Among multiple candidate paths, first count the total number of AGV cars in each path to sort the path priority, among which there are 0 AGV cars, 1 AGV car in path 2, 0 AGV cars...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com