Robot urban navigation system based on combination of visual SLAM and network map
A network map and navigation system technology, applied in control/adjustment systems, two-dimensional position/channel control, instruments, etc., can solve the problem that global path planning is no longer effective, limits accuracy and effectiveness, and wheeled robots cannot Navigation path traffic and other issues to achieve the effect of ensuring accuracy and traffic effectiveness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] The robot city navigation system based on the combination of visual SLAM and network map of the present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
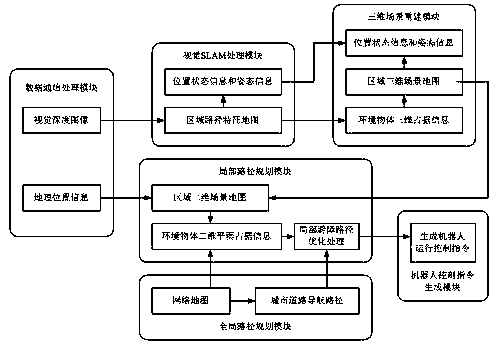
[0031] Such as figure 1 As shown, the present invention provides a robot city navigation system based on the combination of visual SLAM and network map. From the perspective of the overall system architecture, it includes a data communication processing module, a visual SLAM processing module, a three-dimensional scene reconstruction module, and a global path planning module. , a local path planning module and a robot control command generation module.
[0032] The data communication processing module is used to obtain the visual depth image collected by the binocular camera on the wheeled robot, and the geographic location information collected by the positioning sensor on the wheeled robot.
[0033] The visual SLAM processing module is used to perform...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap