

Method of realizing manipulator teaching function based on plc imitation robot instruction
A functional method and manipulator technology, applied in the direction of manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as poor program portability, high technical requirements for operators, cumbersome and complicated processes, etc., and achieve reduced operation difficulty, flexible operation, and Easy to edit effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
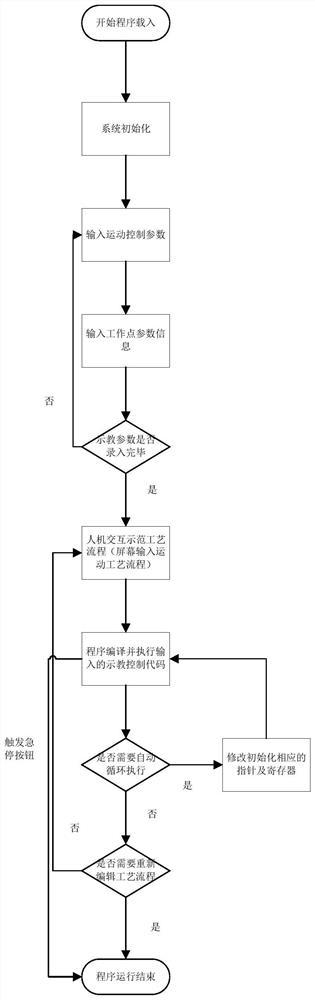
[0016] combined with figure 1 To further illustrate the present invention, it should be understood that these embodiments are only used to illustrate the present invention and are not intended to limit the scope of the present invention. After reading the present invention, those skilled in the art all fall within the scope of the present invention to the modifications of various equivalent forms of the present invention. The scope of the application is defined by the appended claims.
[0017] The specific implementation of the steps shown in the above content is as follows:
[0018]Step 1: Configure the configuration screen and write the control program. In the MCGS device window, add a general-purpose serial port device, add a PLC device, associate the configuration screen with the PLC, increase the read and write channels of the PLC-related code memory area, and increase the read and write channels of the control register. Define configuration-related variables in the rea...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More