Articulated-arm robot and method for machining a workpiece by means of the articulated-arm robot
A technology of robots and articulated arms, applied in the field of articulated arm robots, can solve problems such as inaccuracy, and achieve the effect of high detection accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0036] At the outset, it should be noted that in the differently described embodiments, the same parts have the same reference numerals or the same component designations, wherein the disclosure content contained in the entire description can be transferred to The same part of the diagram label or component name. The positional specifications selected in the description, eg top, bottom, side, etc., relate to the directly described and illustrated figure and, in the event of a change in position, are automatically transferred to the new position.
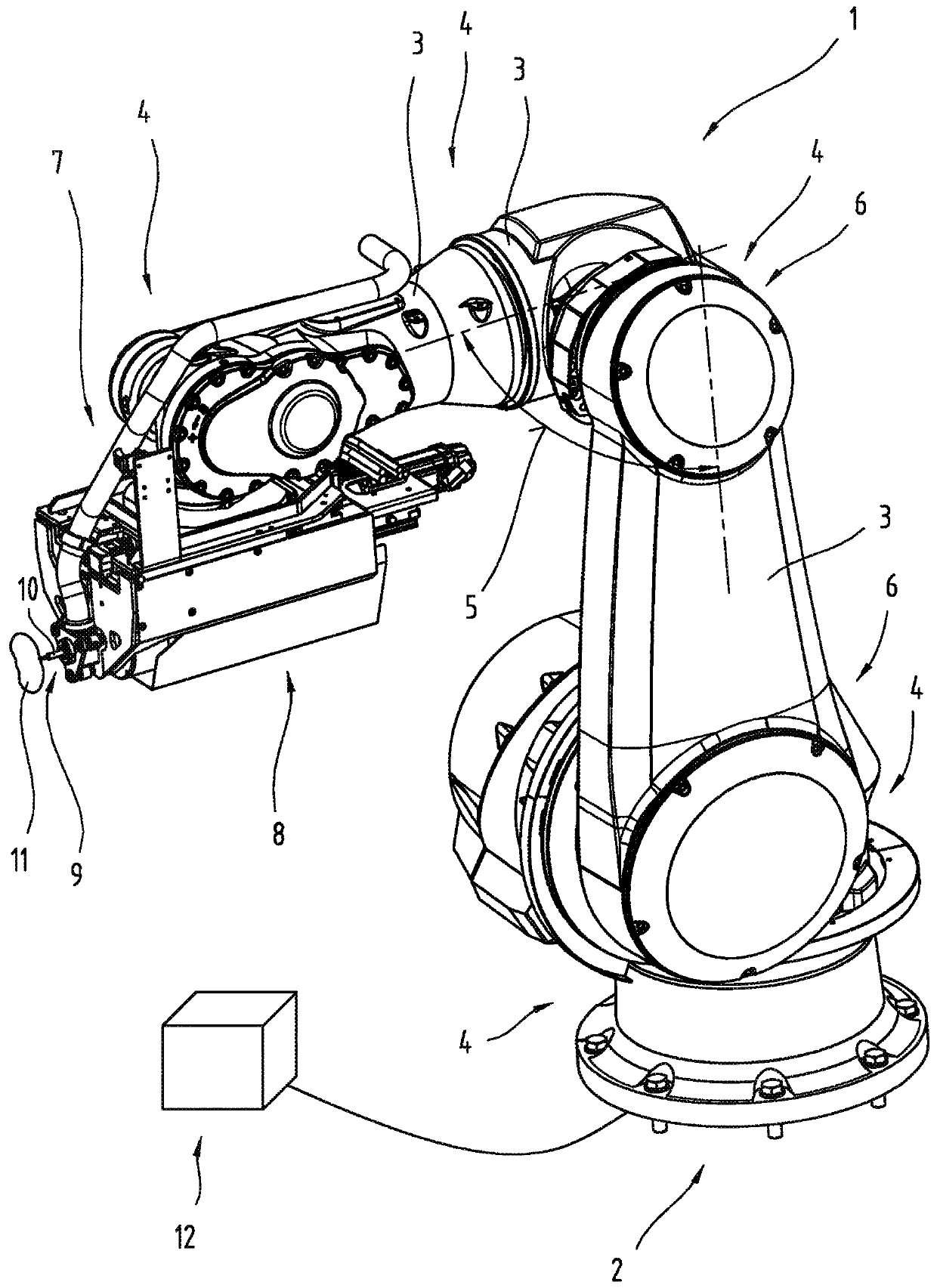
[0037] exist figure 1 A perspective view of the articulated-arm robot 1 is shown in . The articulated-arm robot 1 comprises a base 2 which is fixed to the ground of the establishment site, preferably by means of fastening means. For example, it is also conceivable that the base 2 is arranged on a linear guide such that the complete articulated-arm robot 1 is movable in the longitudinal direction.
[0038] A plurality of lever arms 3...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com