Parallel connection type mechanical arm grabbing device of conical structure
A grasping device, conical structure technology, applied in the direction of manipulator, program-controlled manipulator, claw arm, etc., can solve the problems of deflection angle error, low system safety, poor dynamic performance, etc., to reduce the strength requirements, the control algorithm is simple , the effect of improving stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
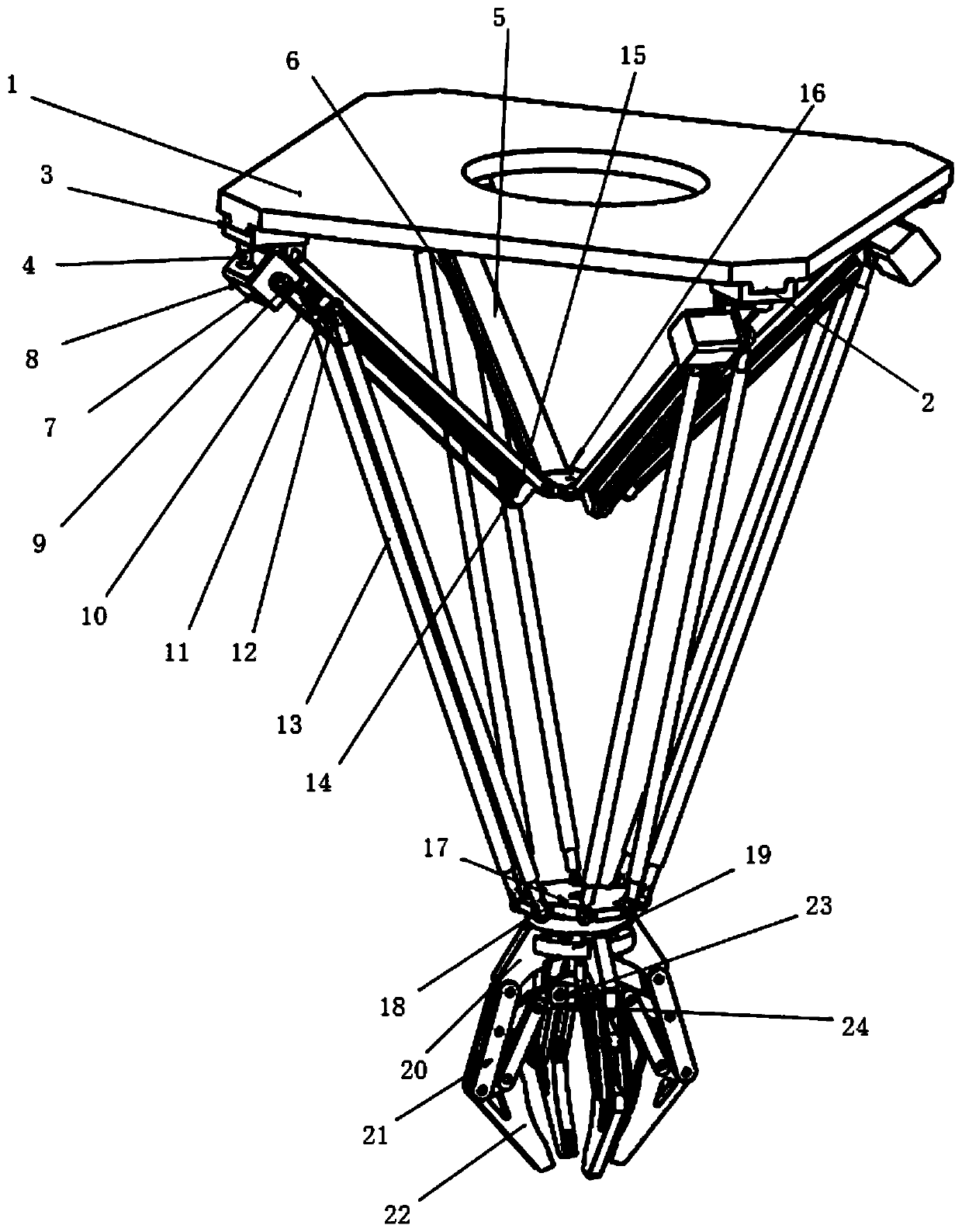
[0033] refer to figure 1 as shown, figure 1 A parallel robotic arm grabbing device with a tapered structure is shown. The grabbing device of the mechanical arm at least includes: a fixed plate 1, a four-axis parallel conical telescopic structure and a grabbing part. The grabbing part is connected with the fixing plate 1 through a four-axis parallel conical telescoping structure. The fixing plate 1 is used to complete the connection between the device and other carrying devices or supporting parts, and provide support for the device. The four-axis parallel conical telescopic structure is used to realize the position adjustment of the grasping part. The grasping part is used for grasping the object to be processed.
[0034] Preferably, one side of the fixed plate 1 is in contact with the support portion, and the other side is provided with a four-axis parallel conical telescopic structure. The fixation of the device is completed, preferably hanging under a certain supportin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com