A comprehensive control method for picking robots in shopping malls and supermarkets
A comprehensive control and robot technology, applied in two-dimensional position/channel control, control/regulation system, non-electric variable control and other directions, it can solve the problem that static obstacles will affect path planning, affect picking efficiency, and consume large labor. problems, to achieve the effect of increasing stability, ensuring stable operation, and improving accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0033] In order to make the present invention easier to understand, the present invention will be further described below with reference to the embodiments and the accompanying drawings.
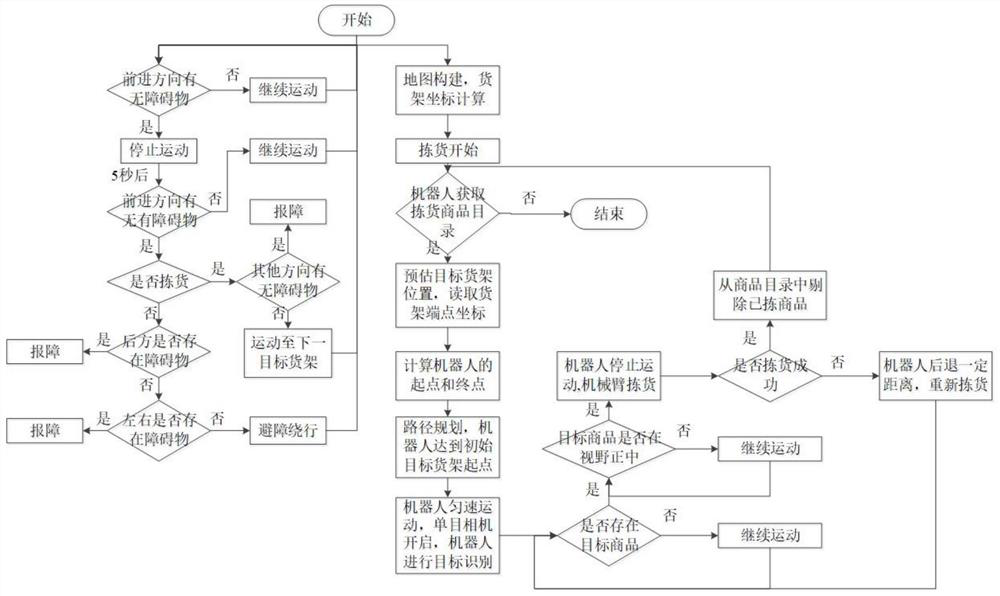
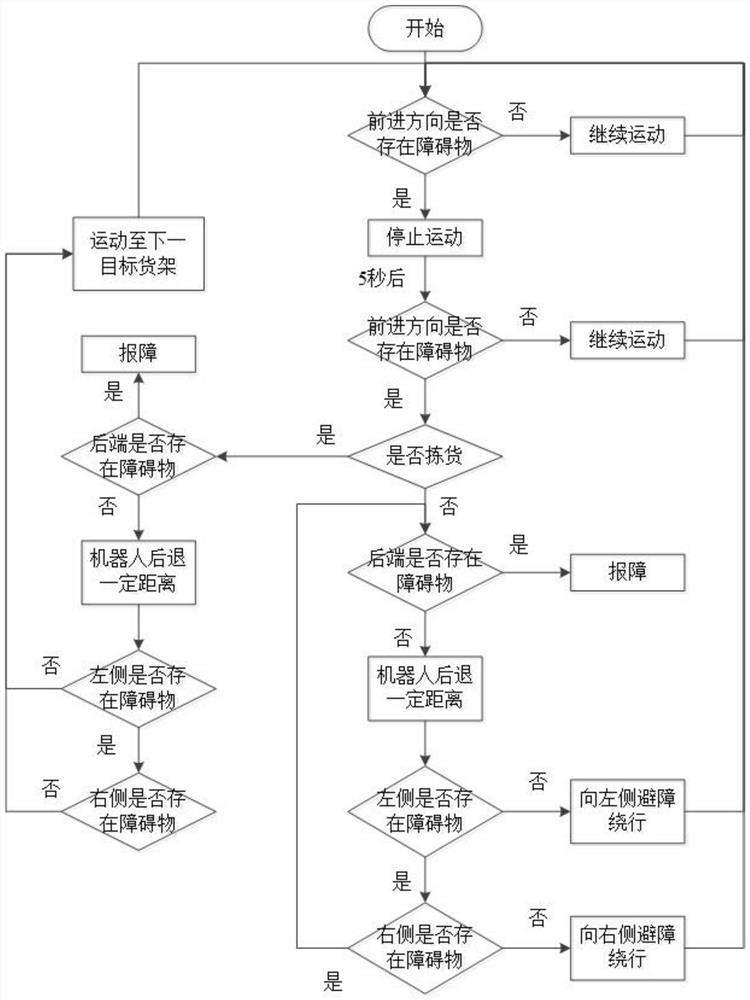
[0034] The present invention provides a comprehensive control method for a shopping mall and supermarket picking robot, including the following contents:
[0035] The picking system of the picking robot includes lidar, monocular camera, four ultrasonic sensors, Arduino development board and upper computer; lidar and monocular camera are located at the front end of the robot, and the scanning plane of lidar is located on the shelf floor The two ultrasonic sensors are installed on the front and rear of the robot respectively, and the other two ultrasonic sensors are installed on the left and right sides of the front end of the robot, respectively forming an angle of 30° with the left and right axes of the robot; Arduino The development board and the host computer are both installed on the robo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com