Monocular camera multi-field-of-view visual guidance device and guidance method
A vision-guided, multi-field-of-view technology, applied in manipulators, program-controlled manipulators, image data processing, etc., and can solve problems such as unusability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
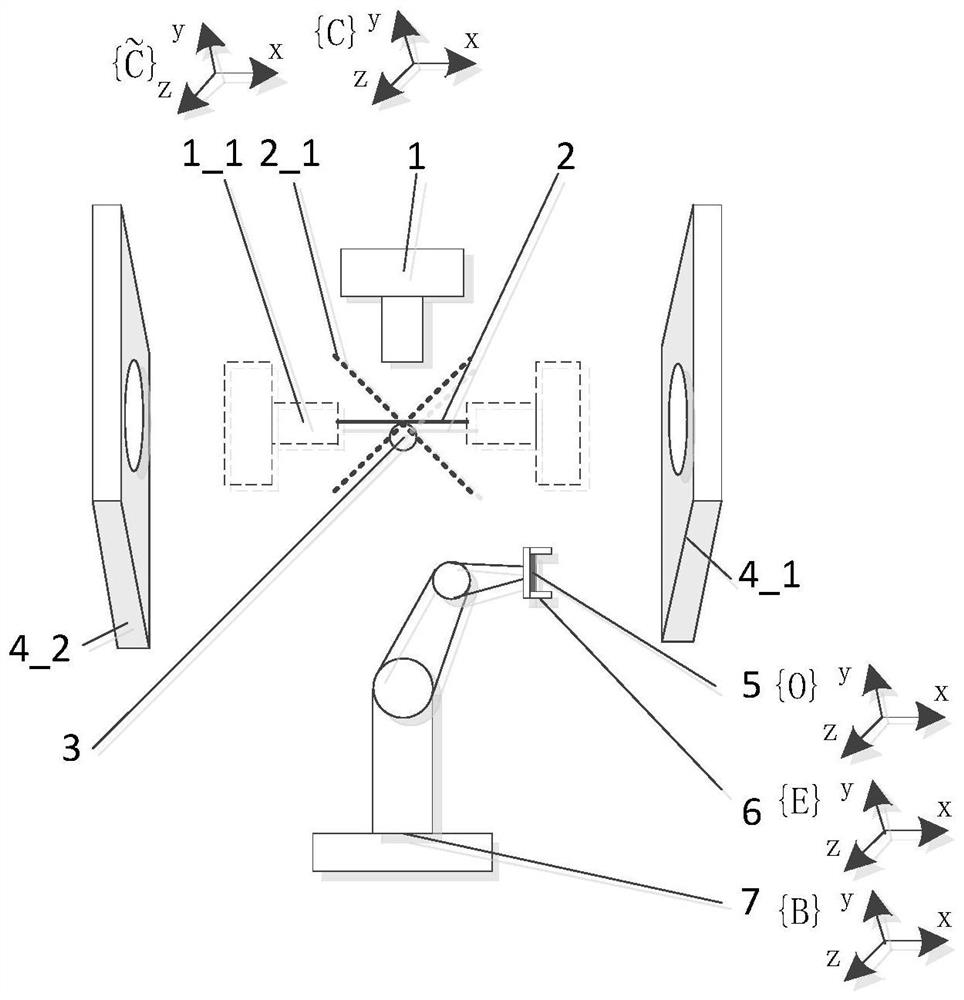
[0044] Such as figure 1 As shown, in the present invention, by placing a flat mirror 2 in front of the camera 1 and changing the posture of the flat mirror 2, the camera 1 can capture different field of view ranges. The calibration method is mainly divided into three parts: 1. Obtain the pose relationship between camera 1 and the robot base coordinate system {B}; 2. When rotating the plane mirror 2 to any pose, obtain the coordinate system of camera 1 and the virtual camera 1_1 in the plane mirror 3. Solve the pose relationship between the virtual camera 1_1 in the plane mirror and the robot base coordinate system {B}. Specific steps are as follows:
[0045] Obtain the pose relationship between camera 1 and the robot base coordinate system {B}: Use the eye-to-hand hand-eye calibration method to calibrate the pose between the camera coordinate system {C} and the robot base coordinate system {B} relation The calibration steps are as follows:
[0046] (1) Move the six-axis ...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap