Low-altitude unmanned aerial vehicle self-positioning method based on vision and inertial navigation fusion
A positioning method and unmanned aerial vehicle technology, applied in navigation, surveying and mapping and navigation, navigation computing tools, etc., can solve the problems of high hardware cost, poor concealment ability, high brightness and texture requirements of input image data, and achieve reliable technical support, Effects that enhance applicability and accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] Now in conjunction with embodiment, accompanying drawing, the present invention will be further described:
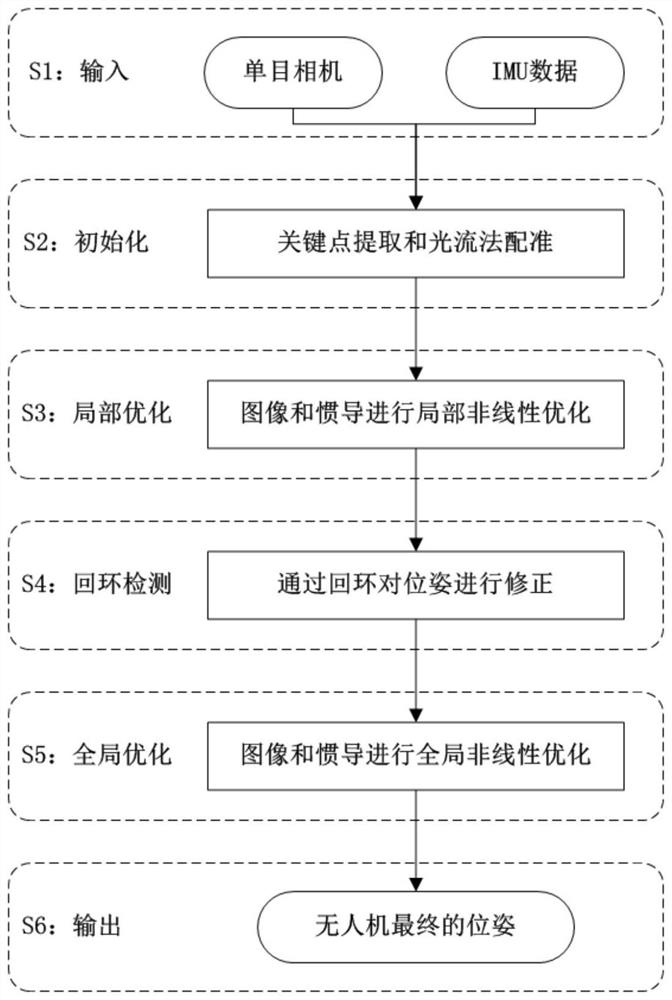
[0022] as attached figure 1 As shown, the present invention provides a self-positioning method for battlefield low-altitude UAVs based on fusion of vision and inertial navigation. First, the image frame collected by the monocular camera and the high-frequency data collected by the IMU module are used as input; then the key point extraction and optical flow method matching are performed on adjacent images, and the IMU data is pre-integrated to realize the initialization after the fusion of the image and the IMU Parameter estimation; then according to the image and inertial navigation information, the data of the local window is nonlinearly optimized to obtain preliminary pose information; then the current scene is judged through loop closure detection, and if there is a loop closure, the current frame and history are established using the bag of words model The l...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com