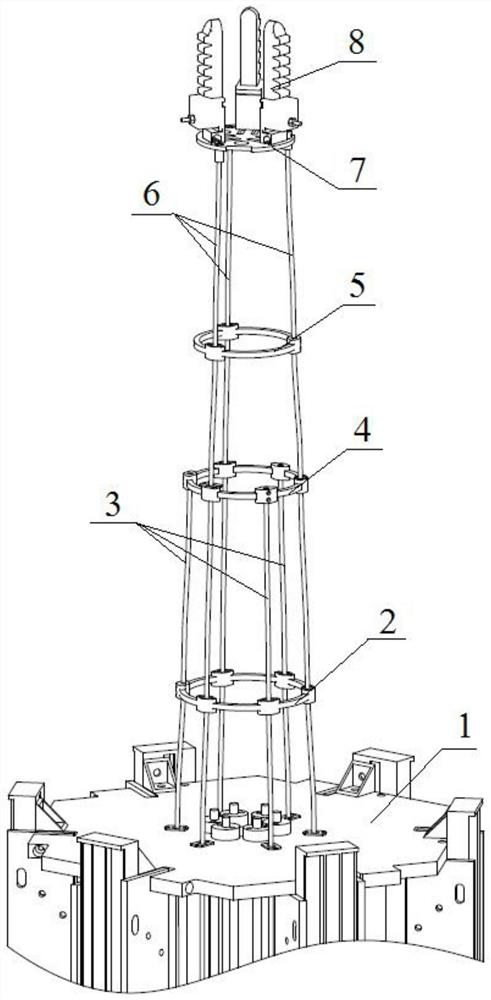
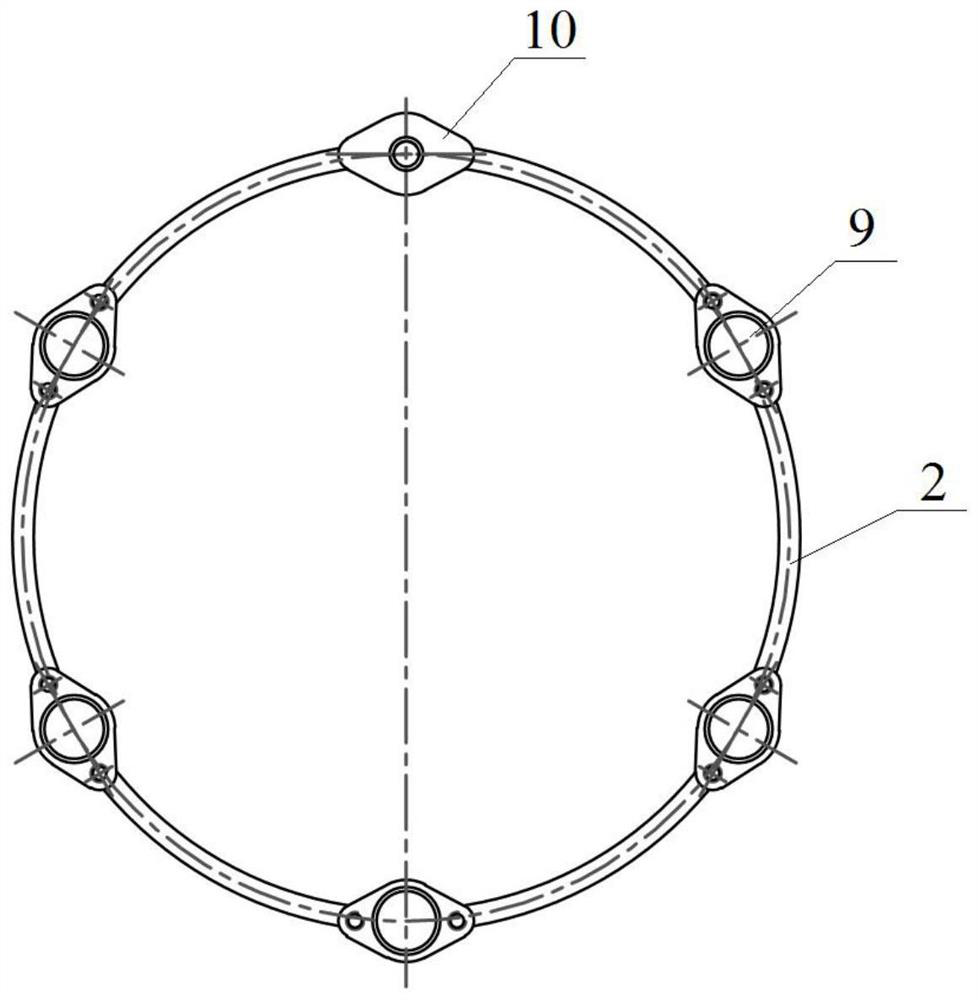
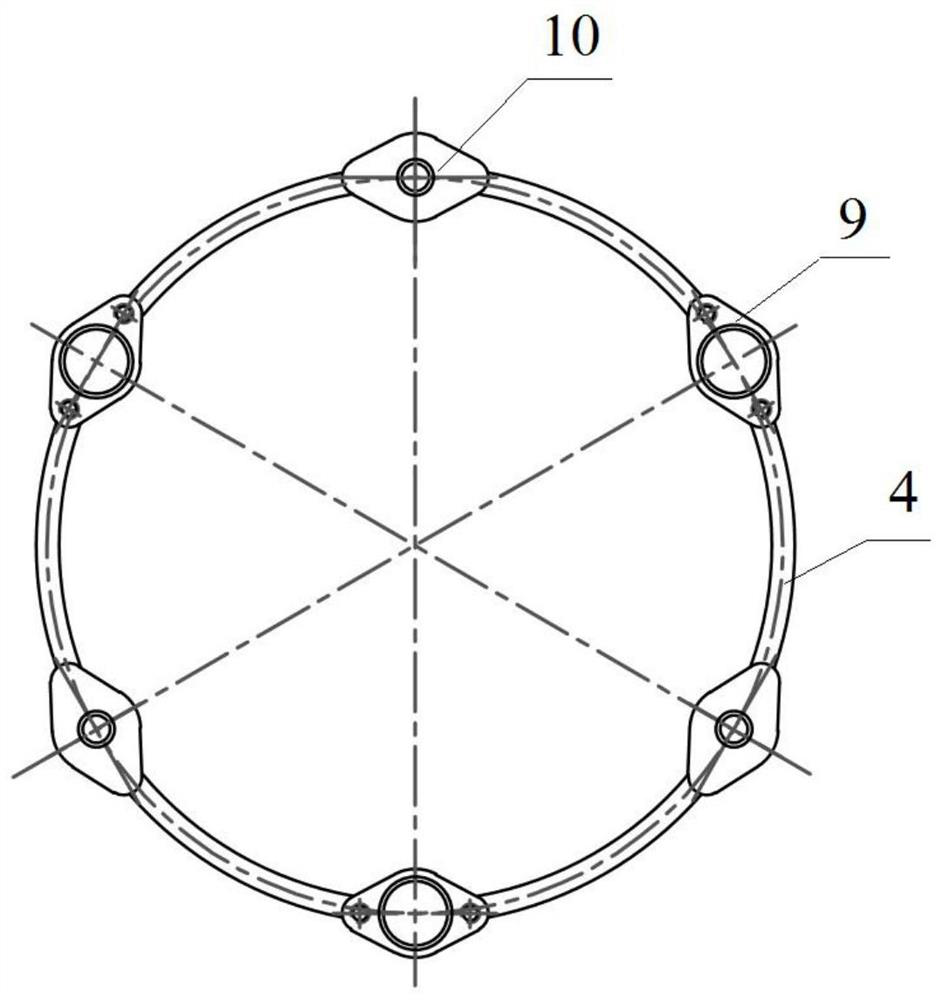
Flexible mechanical arm of series-parallel mixed structure
A hybrid structure and robotic arm technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as limiting the performance and application of flexible arms, manufacturing cost and structural complexity, working space and freedom limitations
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
[0024] The purpose of the present invention is to provide a flexible robot arm with a series-parallel hybrid structure, which realizes a large range of movement of the flexible robot arm relative to its own size with a simple and low-cost series-parallel structure design, and ensures the rigidity brought by the parallel structure .
[0025] In order to make the above objects, features and advantages of the present invention more comprehensible, the present inv...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap