A magnetically controllable permanent magnet crawler wheel and a robot having the same
A crawler wheel and magnetic force technology, applied in the field of permanent magnet crawler wheel and robots with the same, can solve the problems of not being able to act as the foot of a legged climbing robot, unable to realize motion and adsorption magnetic force, low-power in-situ desorption, etc. , to achieve the effect of convenient control, energy saving and convenient desorption
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
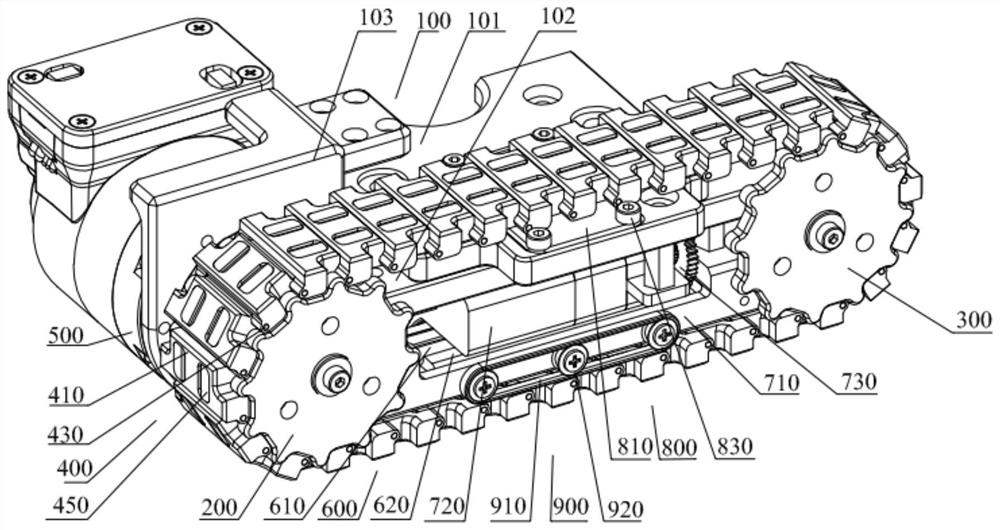
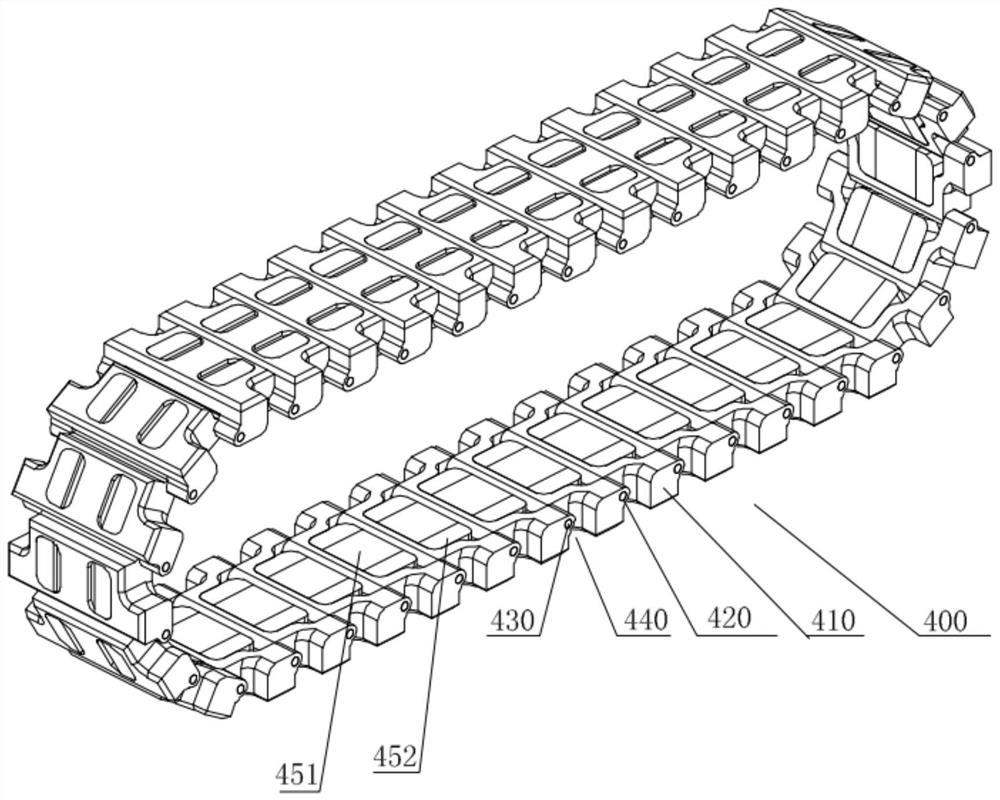
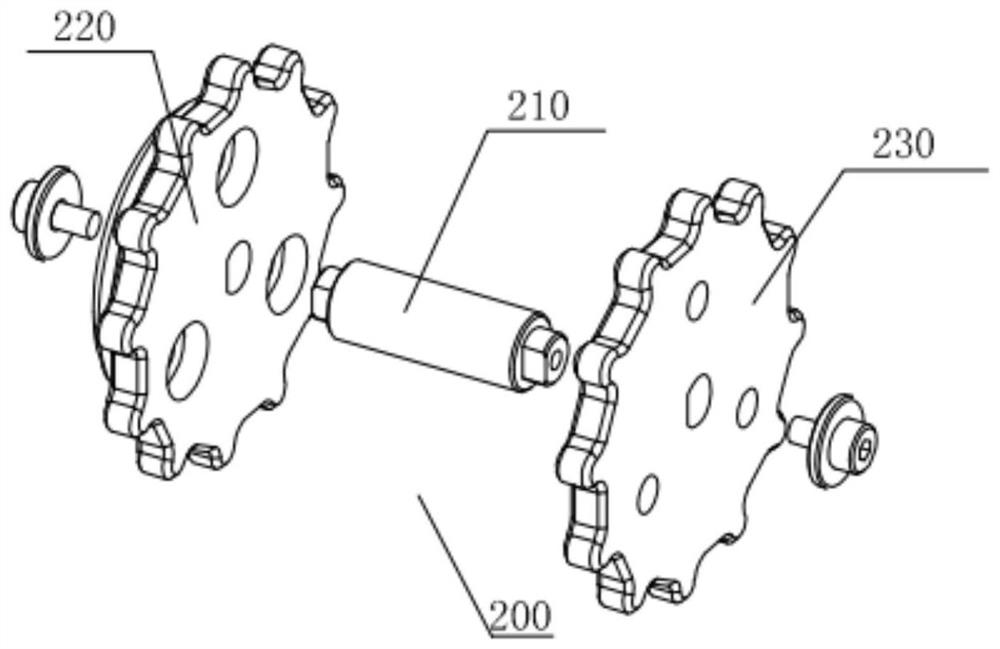
[0054] like figure 1 Shown is an embodiment of the magnetically controllable permanent magnet crawler wheel of the present invention, including a base 100, a first pulley 200, a second pulley 300 and a first crawler belt 400, the first crawler belt 400 is sleeved on the A pulley 200 and a second pulley 300, the first pulley 200 or the second pulley 300 is connected to a drive assembly 500, and the drive assembly 500, the first pulley 200 and the second pulley 300 are all installed on the The base 100; also includes a second magnet unit 600 and a magnetic force adjustment assembly 700 capable of adjusting the magnetic pole direction of the second magnet unit 600, the first crawler belt 400 is embedded with a first magnet unit 450, and the second magnet unit 600 is adjacent to the The first magnet unit 450 is provided; when the magnetic poles of the first magnet unit 450 and the second magnet unit 600 are opposite, a magnetic circuit is formed between the first magnet unit 450 a...
Embodiment 2
[0066] The second embodiment of the magnetically controllable permanent magnet crawler wheel of the present invention includes a base 100 , a first pulley 200 , a second pulley 300 and a first crawler belt 400 , and the first crawler belt 400 is sleeved on the first crawler belt 400 . The pulley 200 and the second pulley 300, the first pulley 200 or the second pulley 300 is connected with the drive assembly 500, and the drive assembly 500, the first pulley 200 and the second pulley 300 are all installed on the base. The seat 100; also includes a second magnet unit 600, the first crawler 400 is embedded with a first magnet unit 450, the second magnet unit 600 is disposed adjacent to the first magnet unit 450 and the second magnet unit 600 and the first magnet When the unit 450 rotates relatively, the magnetic circuit between the first magnet unit 450, the second magnet unit 600 and the adsorbed wall can be changed; when the first magnet unit 450 and the second magnet unit 600 ha...
Embodiment 3
[0072] like Figure 17Shown is an embodiment of the crawler crawler robot of the present invention, including the magnetically controllable permanent magnet crawler wheels as in the first or second embodiment, and the two groups of permanent magnet crawler wheels are symmetrically distributed in the center. In this embodiment, the center plates 101 of the two groups of permanent magnet track wheels can be obtained by fastening the two plates, or the two groups of center plates 101 can be formed into an integral structure. In the implementation of this embodiment, the two groups of permanent magnet crawler wheels are driven by a drive assembly 500 respectively. When the speeds between the two groups of permanent magnet crawler wheels are different, the crawler-type crawler robot can realize differential steering; The magnetic force of the wheel is controllable and adjustable, and the crawler crawler robot of the present invention can coordinate the adsorption magnetic force acc...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com