

Camera external parameter calibration method, device and system in vehicle-mounted mobile measurement system
A vehicle-mounted mobile measurement and camera technology, which is used in measurement devices, image analysis, image enhancement, etc., can solve the problems of high point cloud quality requirements, long time, and easy matching errors.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment 1
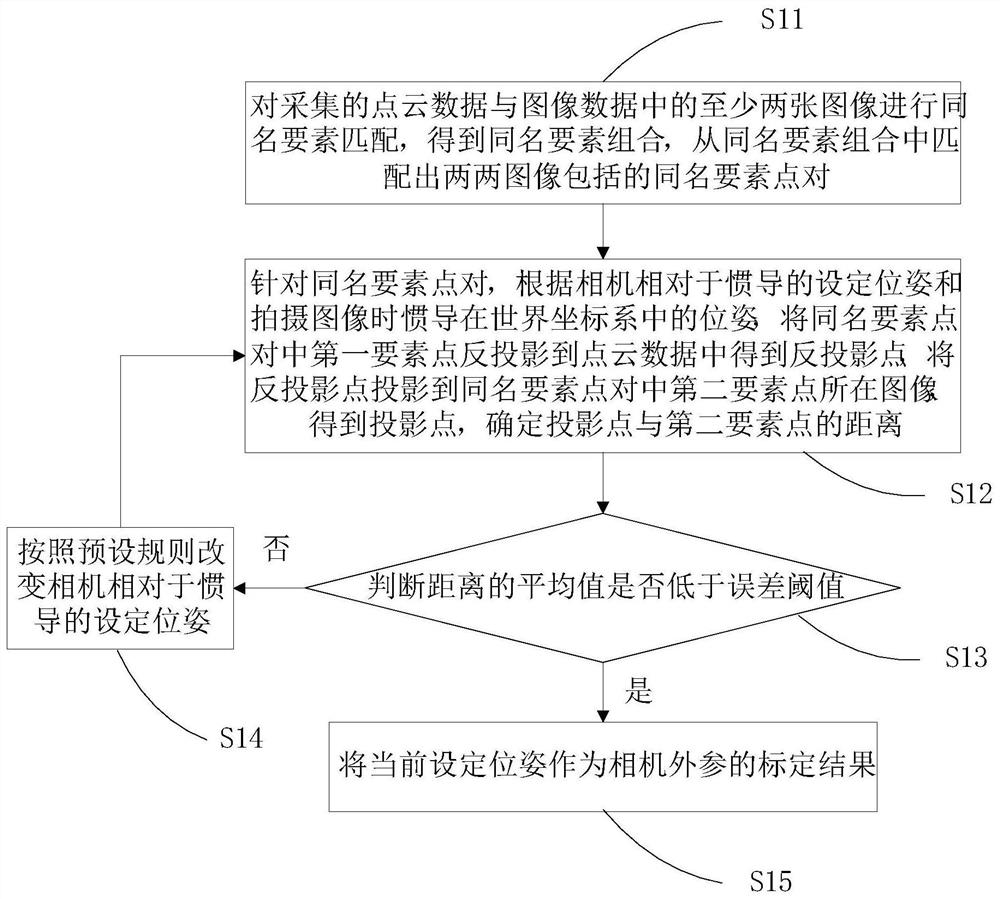
[0056] Embodiment 1 of the present invention provides a camera extrinsic parameter calibration method in a vehicle-mounted mobile measurement system, the process of which is as follows figure 1 shown, including the following steps:
[0057] Step S11: Match the same-named elements of at least two images in the collected point cloud data and image data to obtain the same-named element combination, and match the same-named element point pairs included in the two images from the same-named element combination.
[0058] Obtain what the vehicle-mounted mobile measurement system collects during the driving of the vehicle: image data obtained through the camera, point cloud data obtained through the laser scanner, and inertial navigation trajectory data obtained through the inertial navigation system. Wherein, the inertial navigation trajectory data includes: the trajectory of the relationship between the location information of the inertial navigation system and time, and the posture...
Embodiment 2
[0114] Embodiment 2 of the present invention provides a specific implementation method of camera extrinsic parameter calibration in a vehicle-mounted mobile measurement system, the process of which is as follows Figure 7 shown, including the following steps:
[0115] Step S71: Obtain the image data, point cloud data and inertial navigation track data collected by the vehicle-mounted mobile measurement system during the driving of the vehicle.
[0116] Specifically, the obtained point cloud data and inertial navigation trajectory data are the data of the local world coordinate system after solving. In this way, the size of the coordinate value in the data can be reduced, the calculation amount can be reduced, and the readability of the data can be increased.
[0117] Step S72: Identify the elements in the point cloud data, and for each element, use the deep learning method to determine the elements with the same name in at least two images in the image data, obtain a combinat...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More