

A conveniently installed robot grabbing device
A grasping device and robot technology, applied in the directions of manipulators, manufacturing tools, chucks, etc., can solve the problems of cumbersome disassembly and assembly process of anti-skid parts, easy to be interfered by manipulators, and small clamping space, etc., so as to improve disassembly and assembly efficiency and reduce disassembly and assembly. Easy to install, easy to locate quickly
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment 1
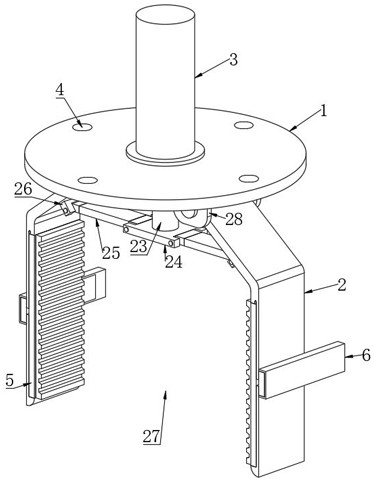
[0036] like figure 1 with figure 2 As shown, a conveniently installed robot grabbing device includes a mounting base 1, a telescopic hydraulic cylinder 3 is provided at the center of the upper surface of the mounting base 1, and one end of the telescopic hydraulic cylinder 3 is provided with a hydraulic cylinder output end 23 One end of the output end 23 of the hydraulic cylinder is fixedly equipped with a movable seat 24, the surface of the movable seat 24 is provided with a jaw connecting plate 25, and one end of the jaw connecting plate 25 is provided with a first rotating seat 26, so A second rotating seat 28 is provided below the mounting seat 1, and the second rotating seat 28 of the mounting seat 1 is provided with a grasping jaw 2, and the outer surface of the grasping jaw 2 is provided with a removal mechanism 6, The inside surface of the grasping jaw 2 is provided with a positioning mechanism 5, and the upper surface of the mounting seat 1 is provided with a mounti...
Embodiment 2
[0038] like image 3 , Image 6 with Figure 7 As shown, the components that are the same as or corresponding to those in Embodiment 1 use the corresponding reference numerals as in Embodiment 1. For the sake of simplicity, only the differences from Embodiment 1 will be described below. The difference between this embodiment 2 and embodiment 1 is that: a conveniently installed removal mechanism of the robot grabbing device includes a removal slide rail 12, and a removal slide block 13 is movably installed inside the removal slide rail 12, so A turning hole 18 is provided on the surface of the removing slider 13, a positioning groove 8 is provided on the grabbing jaw 2, a positioning slot 9 is provided on the grabbing jaw 2, and a positioning groove 9 is provided on the grabbing jaw 2, and the moving out slide rail 12 There is a removal slideway 14 inside, the removal slide block 13 is slidingly connected with the removal slideway 14 of the removal slide rail 12, the removal ...
Embodiment 3
[0040] like Figure 3 to Figure 9 As shown, the components that are the same as or corresponding to those in Embodiment 1 use the corresponding reference numerals as in Embodiment 1. For the sake of simplicity, only the differences from Embodiment 1 will be described below. The difference between this embodiment 3 and embodiment 1 is: a positioning shell, an anti-slip pad support and an anti-slip cushion block of a conveniently installed robot grabbing device, the positioning shell 11 is provided with a first assembly chute 16. The positioning shell 11 is fixedly equipped with assembly protrusions 17, the anti-slip pad support 19 is provided with a second assembly chute 22, and the anti-slip pad 20 is provided with anti-slip lines 21, and the anti-slip lines 21 is evenly distributed on the surface of the anti-skid pad 20, the anti-skid pad support 19 matches the first assembly chute 16 of the positioning shell 11, and the anti-slip pad support 19 is connected to the positionin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More