Navigation method, device, equipment and storage medium
A navigation method and grid technology, applied in the field of intelligent navigation, can solve the problem of low navigation accuracy and achieve the effect of improving safety and shortening time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
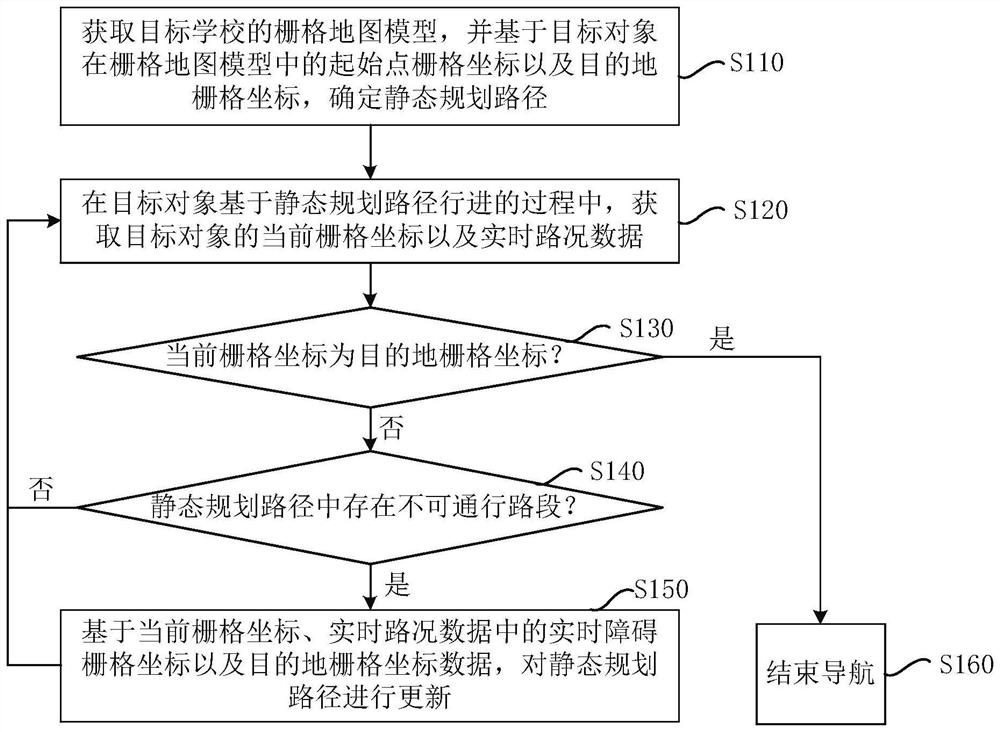
[0033] figure 1 It is a flowchart of a navigation method provided according to the first embodiment of the present invention. This embodiment can be applied to the situation of route navigation in a campus scene. The method can be executed by a navigation device, and the navigation device can use hardware and / or Implemented in the form of software, the navigation device can be configured in the navigation device. like figure 1 As shown, the method includes:
[0034] S110. Acquire a grid map model of the target school, and determine a static planning path based on grid coordinates of a starting point and grid coordinates of a destination of the target object in the grid map model.
[0035] Specifically, the grid map model abstracts the actual scene environment into a two-dimensional terrain, so as to achieve the purpose of simplifying the movement space of the target object. The grid map model discretizes the school environment into grids of the same size according to a spec...
Embodiment 2
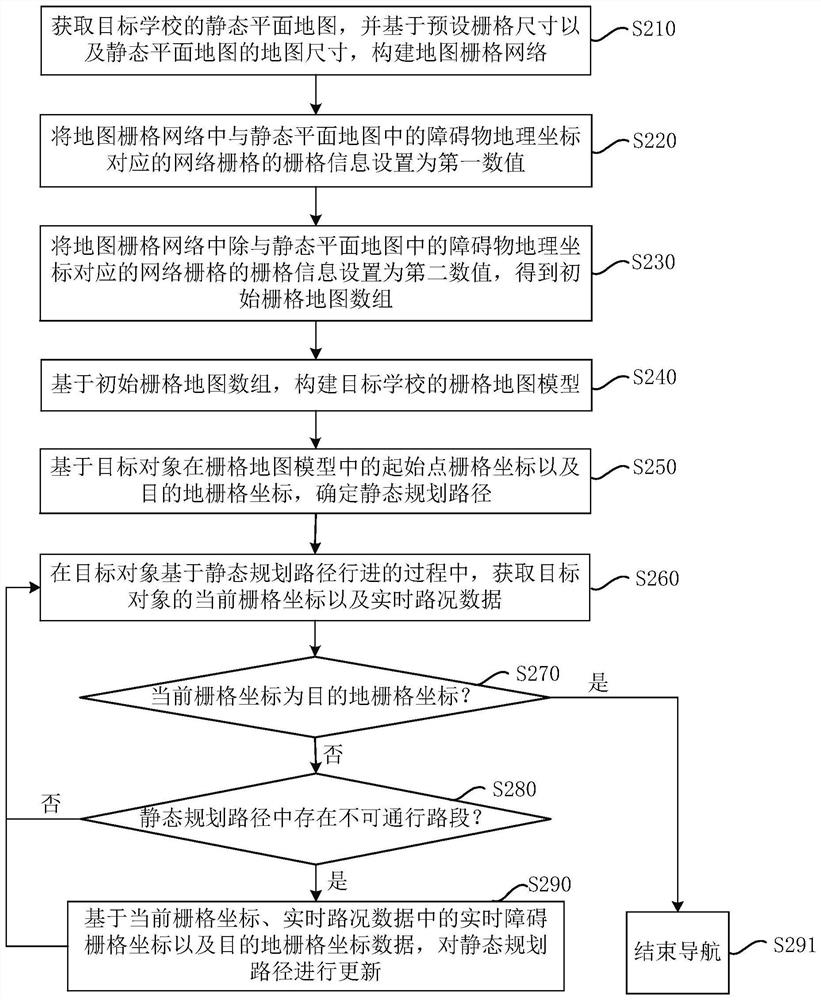
[0071] image 3 It is a flow chart of a navigation method according to Embodiment 2 of the present invention. This embodiment further refines the "obtaining the grid map model of the target school" in the above embodiment. like image 3 As shown, the method includes:
[0072] S210. Obtain the static planar map of the target school, and construct a map grid network based on the preset grid size and the map size of the static planar map.
[0073] Wherein, for example, if the target object is a person, the preset grid size may be 1m*1m, and if the target object is a motor vehicle, the preset grid size may be 5m*5m. The preset grid size can be adjusted according to the type of target object.
[0074] Specifically, the map size of the static planar map is determined based on the geographical coordinates corresponding to the upper left corner, lower left corner, upper right corner, and lower right corner of the static planar map.
[0075] S220. Set the grid information of the ne...
Embodiment 3
[0117] Image 6 It is a schematic structural diagram of a navigation device according to Embodiment 3 of the present invention. like Image 6 As shown, the device includes: a static planned route determination module 310 , an impassable road segment determination module 320 , a static planned route update module 330 and a navigation end module 340 .
[0118] Wherein, the static planning path determination module 310 is used to obtain the grid map model of the target school, and determine the static planning path based on the grid coordinates of the starting point and the grid coordinates of the destination of the target object in the grid map model;
[0119] An impassable road section determination module 320, configured to determine whether there is an impassable road section in the static planned path based on the current grid coordinates of the target object and the acquired real-time road condition data during the process of the target object traveling based on the static...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com