

Achieving Real-Time Data Processing with Neuromorphic Vision Systems
APR 14, 20269 MIN READ
Generate Your Research Report Instantly with AI Agent
PatSnap Eureka helps you evaluate technical feasibility & market potential.
Neuromorphic Vision Background and Real-Time Processing Goals
Neuromorphic vision systems represent a paradigm shift from traditional digital image processing, drawing inspiration from the biological neural networks found in mammalian visual systems. These systems emerged from decades of research into how the human brain processes visual information, beginning with foundational work in the 1980s by researchers like Carver Mead at Caltech. The core principle involves mimicking the event-driven, asynchronous processing mechanisms of biological neurons, where information is encoded as discrete spikes rather than continuous analog signals or frame-based digital data.
The evolution of neuromorphic vision technology has been driven by the limitations of conventional computer vision systems, particularly in scenarios requiring ultra-low latency and power efficiency. Traditional frame-based cameras capture images at fixed intervals, typically 30-60 frames per second, creating inherent delays and redundant data processing. In contrast, neuromorphic vision sensors respond to changes in light intensity at the pixel level, generating events only when significant visual changes occur. This event-driven approach eliminates motion blur and reduces data redundancy by orders of magnitude.
Current neuromorphic vision systems aim to achieve sub-millisecond response times for critical applications such as autonomous vehicle collision avoidance, high-speed robotics, and industrial quality control. The technology targets processing latencies below 1 millisecond while maintaining power consumption levels 100-1000 times lower than conventional vision systems. These ambitious performance goals stem from the increasing demand for edge computing solutions that can operate independently without cloud connectivity.
The real-time processing objectives extend beyond mere speed improvements to encompass adaptive learning capabilities and dynamic scene understanding. Modern neuromorphic systems are designed to continuously adapt their processing algorithms based on environmental conditions, enabling robust performance across varying lighting conditions, weather patterns, and operational contexts. This adaptability represents a fundamental departure from static algorithmic approaches, moving toward truly intelligent vision systems that can evolve their processing strategies in real-time.
The convergence of neuromorphic hardware advances and sophisticated spike-based algorithms has created unprecedented opportunities for achieving genuine real-time visual processing, positioning this technology as a cornerstone for next-generation autonomous systems and intelligent sensing applications.
The evolution of neuromorphic vision technology has been driven by the limitations of conventional computer vision systems, particularly in scenarios requiring ultra-low latency and power efficiency. Traditional frame-based cameras capture images at fixed intervals, typically 30-60 frames per second, creating inherent delays and redundant data processing. In contrast, neuromorphic vision sensors respond to changes in light intensity at the pixel level, generating events only when significant visual changes occur. This event-driven approach eliminates motion blur and reduces data redundancy by orders of magnitude.
Current neuromorphic vision systems aim to achieve sub-millisecond response times for critical applications such as autonomous vehicle collision avoidance, high-speed robotics, and industrial quality control. The technology targets processing latencies below 1 millisecond while maintaining power consumption levels 100-1000 times lower than conventional vision systems. These ambitious performance goals stem from the increasing demand for edge computing solutions that can operate independently without cloud connectivity.
The real-time processing objectives extend beyond mere speed improvements to encompass adaptive learning capabilities and dynamic scene understanding. Modern neuromorphic systems are designed to continuously adapt their processing algorithms based on environmental conditions, enabling robust performance across varying lighting conditions, weather patterns, and operational contexts. This adaptability represents a fundamental departure from static algorithmic approaches, moving toward truly intelligent vision systems that can evolve their processing strategies in real-time.
The convergence of neuromorphic hardware advances and sophisticated spike-based algorithms has created unprecedented opportunities for achieving genuine real-time visual processing, positioning this technology as a cornerstone for next-generation autonomous systems and intelligent sensing applications.
Market Demand for Real-Time Neuromorphic Vision Applications
The market demand for real-time neuromorphic vision applications is experiencing unprecedented growth across multiple industry verticals, driven by the increasing need for intelligent, low-power, and ultra-fast visual processing systems. Traditional computer vision approaches face significant limitations in power consumption and processing latency, creating substantial market opportunities for neuromorphic solutions that can process visual information with biological efficiency.
Autonomous vehicle manufacturers represent one of the most significant demand drivers, requiring vision systems capable of processing complex visual scenes in real-time while maintaining minimal power consumption. The automotive industry's push toward higher levels of automation necessitates vision systems that can handle dynamic lighting conditions, rapid scene changes, and multiple object tracking simultaneously without the computational overhead of conventional digital processors.
Industrial automation and robotics sectors demonstrate strong demand for neuromorphic vision systems, particularly in applications requiring precise real-time object recognition, quality control, and adaptive manufacturing processes. These applications benefit from the event-driven nature of neuromorphic processing, which enables immediate response to visual stimuli without the latency associated with frame-based processing systems.
The surveillance and security market shows increasing interest in neuromorphic vision technologies due to their ability to operate continuously with minimal power requirements while maintaining high sensitivity to motion and environmental changes. Edge computing applications in smart cities and IoT deployments particularly value the distributed processing capabilities and reduced bandwidth requirements of neuromorphic systems.
Healthcare and medical device applications present emerging demand for real-time neuromorphic vision, especially in surgical robotics, prosthetics, and diagnostic imaging systems where ultra-low latency and power efficiency are critical requirements. The ability to process visual information with human-like adaptability makes neuromorphic systems particularly attractive for medical applications requiring precise real-time feedback.
Consumer electronics manufacturers are exploring neuromorphic vision integration for next-generation smartphones, augmented reality devices, and smart home systems, driven by user expectations for instantaneous visual recognition and extended battery life. The market demand extends to drone technology, where weight and power constraints make neuromorphic vision systems increasingly attractive for real-time navigation and obstacle avoidance applications.
Autonomous vehicle manufacturers represent one of the most significant demand drivers, requiring vision systems capable of processing complex visual scenes in real-time while maintaining minimal power consumption. The automotive industry's push toward higher levels of automation necessitates vision systems that can handle dynamic lighting conditions, rapid scene changes, and multiple object tracking simultaneously without the computational overhead of conventional digital processors.
Industrial automation and robotics sectors demonstrate strong demand for neuromorphic vision systems, particularly in applications requiring precise real-time object recognition, quality control, and adaptive manufacturing processes. These applications benefit from the event-driven nature of neuromorphic processing, which enables immediate response to visual stimuli without the latency associated with frame-based processing systems.
The surveillance and security market shows increasing interest in neuromorphic vision technologies due to their ability to operate continuously with minimal power requirements while maintaining high sensitivity to motion and environmental changes. Edge computing applications in smart cities and IoT deployments particularly value the distributed processing capabilities and reduced bandwidth requirements of neuromorphic systems.
Healthcare and medical device applications present emerging demand for real-time neuromorphic vision, especially in surgical robotics, prosthetics, and diagnostic imaging systems where ultra-low latency and power efficiency are critical requirements. The ability to process visual information with human-like adaptability makes neuromorphic systems particularly attractive for medical applications requiring precise real-time feedback.
Consumer electronics manufacturers are exploring neuromorphic vision integration for next-generation smartphones, augmented reality devices, and smart home systems, driven by user expectations for instantaneous visual recognition and extended battery life. The market demand extends to drone technology, where weight and power constraints make neuromorphic vision systems increasingly attractive for real-time navigation and obstacle avoidance applications.
Current State and Challenges of Neuromorphic Vision Systems
Neuromorphic vision systems represent a paradigm shift in visual processing technology, drawing inspiration from biological neural networks to achieve unprecedented efficiency in real-time data processing. Currently, the field has progressed from theoretical concepts to practical implementations, with several commercial and research platforms demonstrating viable neuromorphic vision capabilities. Leading institutions and companies have developed event-based cameras and processing chips that can handle dynamic visual scenes with microsecond-level latency.
The technological landscape is dominated by event-driven architectures that fundamentally differ from traditional frame-based imaging systems. These systems process visual information asynchronously, responding only to changes in pixel intensity rather than capturing complete frames at fixed intervals. This approach enables significant reductions in power consumption and data bandwidth while maintaining high temporal resolution. Current implementations typically achieve power efficiency improvements of 10-100x compared to conventional vision systems.
However, significant technical challenges persist in achieving optimal real-time performance. Hardware limitations remain a primary constraint, as existing neuromorphic processors often lack the computational density required for complex vision tasks. The sparse and asynchronous nature of event data creates unique algorithmic challenges, requiring specialized processing techniques that differ substantially from traditional computer vision approaches. Current systems struggle with standardization issues, as various manufacturers employ different event formats and processing paradigms.
Integration challenges pose another substantial barrier to widespread adoption. Existing software ecosystems and development tools are predominantly designed for frame-based vision systems, creating compatibility gaps that complicate system integration. The lack of standardized interfaces and protocols further complicates the development process, requiring specialized expertise and custom solutions for each implementation.
Performance optimization remains an ongoing challenge, particularly in complex real-world environments. Current neuromorphic vision systems excel in controlled conditions but face difficulties with varying lighting conditions, high-speed motion, and complex scene understanding tasks. The trade-offs between processing speed, accuracy, and power consumption require careful optimization for specific applications, limiting the versatility of current solutions.
Despite these challenges, recent advances in chip architecture and algorithm development show promising directions for overcoming current limitations. Emerging hybrid approaches that combine neuromorphic and conventional processing elements demonstrate potential for bridging performance gaps while maintaining the efficiency advantages of event-based systems.
The technological landscape is dominated by event-driven architectures that fundamentally differ from traditional frame-based imaging systems. These systems process visual information asynchronously, responding only to changes in pixel intensity rather than capturing complete frames at fixed intervals. This approach enables significant reductions in power consumption and data bandwidth while maintaining high temporal resolution. Current implementations typically achieve power efficiency improvements of 10-100x compared to conventional vision systems.
However, significant technical challenges persist in achieving optimal real-time performance. Hardware limitations remain a primary constraint, as existing neuromorphic processors often lack the computational density required for complex vision tasks. The sparse and asynchronous nature of event data creates unique algorithmic challenges, requiring specialized processing techniques that differ substantially from traditional computer vision approaches. Current systems struggle with standardization issues, as various manufacturers employ different event formats and processing paradigms.
Integration challenges pose another substantial barrier to widespread adoption. Existing software ecosystems and development tools are predominantly designed for frame-based vision systems, creating compatibility gaps that complicate system integration. The lack of standardized interfaces and protocols further complicates the development process, requiring specialized expertise and custom solutions for each implementation.
Performance optimization remains an ongoing challenge, particularly in complex real-world environments. Current neuromorphic vision systems excel in controlled conditions but face difficulties with varying lighting conditions, high-speed motion, and complex scene understanding tasks. The trade-offs between processing speed, accuracy, and power consumption require careful optimization for specific applications, limiting the versatility of current solutions.
Despite these challenges, recent advances in chip architecture and algorithm development show promising directions for overcoming current limitations. Emerging hybrid approaches that combine neuromorphic and conventional processing elements demonstrate potential for bridging performance gaps while maintaining the efficiency advantages of event-based systems.
Existing Real-Time Processing Solutions for Vision Systems
01 Event-driven neuromorphic processing architectures
Neuromorphic vision systems utilize event-driven processing architectures that mimic biological neural networks to process visual data asynchronously. These architectures process information only when changes occur in the visual field, significantly reducing computational overhead and power consumption. The event-driven approach enables real-time processing by eliminating redundant data processing and focusing computational resources on relevant temporal changes in the scene.- Event-driven neuromorphic processing architectures: Neuromorphic vision systems utilize event-driven processing architectures that mimic biological neural networks to process visual data asynchronously. These architectures process information only when changes occur in the visual field, significantly reducing computational overhead and power consumption. The event-driven approach enables real-time processing by eliminating redundant frame-based computations and focusing only on temporal changes in the scene.
- Spiking neural network implementations for vision processing: Spiking neural networks are employed in neuromorphic vision systems to process visual information using spike-based temporal coding mechanisms. These networks enable efficient real-time data processing by encoding information in the timing and frequency of neural spikes rather than continuous values. The approach provides low-latency processing capabilities suitable for time-critical applications while maintaining biological plausibility in computational models.
- Hardware acceleration and parallel processing units: Specialized hardware accelerators and parallel processing architectures are integrated into neuromorphic vision systems to achieve real-time performance. These implementations utilize custom silicon designs, field-programmable gate arrays, or application-specific integrated circuits optimized for neuromorphic computations. The hardware solutions enable massive parallelism and low-latency processing required for real-time visual data analysis.
- Dynamic vision sensor integration and preprocessing: Dynamic vision sensors are integrated with neuromorphic processing systems to capture temporal contrast changes in visual scenes with microsecond resolution. These sensors generate asynchronous event streams that are preprocessed and filtered to extract relevant features for downstream processing. The integration enables real-time capture and processing of high-speed visual phenomena that conventional frame-based cameras cannot adequately handle.
- Adaptive learning and online training mechanisms: Neuromorphic vision systems incorporate adaptive learning algorithms that enable online training and real-time parameter adjustment based on incoming visual data. These mechanisms allow the systems to continuously optimize their performance and adapt to changing environmental conditions without requiring offline retraining. The adaptive capabilities enhance robustness and enable deployment in dynamic real-world scenarios where visual conditions vary unpredictably.
02 Spiking neural network implementations for vision processing
Spiking neural networks are employed in neuromorphic vision systems to process visual information using spike-based temporal coding mechanisms. These networks enable efficient real-time data processing by encoding information in the timing and frequency of neural spikes rather than continuous values. The spike-based processing approach provides advantages in terms of energy efficiency, temporal precision, and the ability to handle asynchronous sensory data streams from event-based cameras.Expand Specific Solutions03 Hardware acceleration and specialized neuromorphic chips
Dedicated neuromorphic hardware accelerators and specialized chips are designed to enable real-time processing of visual data in neuromorphic systems. These hardware solutions incorporate parallel processing capabilities, low-latency data pathways, and energy-efficient computational units optimized for neural network operations. The specialized architecture allows for high-speed processing of complex visual tasks while maintaining low power consumption suitable for embedded and mobile applications.Expand Specific Solutions04 Dynamic vision sensor integration and preprocessing
Integration of dynamic vision sensors with neuromorphic processing systems enables efficient capture and preprocessing of visual data for real-time applications. These sensors generate asynchronous event streams that capture temporal changes in the visual scene with high temporal resolution and low latency. Preprocessing techniques are applied to filter, compress, and organize the event data to optimize subsequent neuromorphic processing stages and reduce computational burden.Expand Specific Solutions05 Adaptive learning and online training mechanisms
Neuromorphic vision systems incorporate adaptive learning algorithms and online training mechanisms that enable real-time adjustment of network parameters based on incoming visual data. These mechanisms allow the system to continuously improve its performance and adapt to changing environmental conditions without requiring offline retraining. The online learning capability is essential for applications requiring immediate response to novel situations and dynamic scene understanding in real-time operational contexts.Expand Specific Solutions
Key Players in Neuromorphic Vision and Computing Industry
The neuromorphic vision systems market for real-time data processing is in its early commercialization stage, with significant growth potential driven by increasing demand for edge AI applications. The market remains relatively small but is expanding rapidly as automotive, defense, and consumer electronics sectors recognize the energy efficiency advantages of brain-inspired computing architectures. Technology maturity varies considerably across players, with established tech giants like IBM, Tencent, and Snap leveraging their extensive R&D capabilities to advance neuromorphic algorithms and hardware integration. Defense contractors including Raytheon, Northrop Grumman, and HRL Laboratories are developing specialized applications for military surveillance and autonomous systems. Academic institutions such as University of Southern California, Nanjing University, and EPFL are contributing fundamental research breakthroughs. Emerging companies like Precision Neuroscience and HL Klemove are focusing on niche applications in brain-computer interfaces and autonomous driving respectively, while traditional automotive manufacturers including Volkswagen, Porsche, and Audi are integrating these technologies into next-generation vehicle perception systems.
International Business Machines Corp.
Technical Solution: IBM has developed TrueNorth neuromorphic chips that integrate 1 million programmable spiking neurons and 256 million programmable synapses on a single chip, consuming only 70 milliwatts of power during real-time operation. Their neuromorphic vision system processes visual data through event-driven computation, where each pixel responds asynchronously to changes in light intensity rather than capturing frames at fixed intervals. This approach enables real-time processing of dynamic visual scenes with significantly reduced power consumption compared to traditional digital processors. The system utilizes spike-timing-dependent plasticity for adaptive learning and can handle complex pattern recognition tasks while maintaining ultra-low latency response times suitable for autonomous systems and robotics applications.
Strengths: Ultra-low power consumption, real-time event-driven processing, scalable architecture. Weaknesses: Limited ecosystem support, complex programming model, restricted commercial availability.
École Polytechnique Fédérale de Lausanne
Technical Solution: EPFL has pioneered dynamic vision sensor technology that forms the foundation of modern neuromorphic vision systems for real-time applications. Their event-based cameras capture visual information asynchronously, with each pixel independently detecting changes in light intensity and generating events only when significant changes occur. This approach eliminates motion blur and enables processing of high-speed visual phenomena that traditional cameras cannot capture effectively. Their neuromorphic processing algorithms handle millions of events per second, enabling real-time tracking of fast-moving objects and dynamic scene analysis. The system demonstrates exceptional performance in applications requiring microsecond-level temporal resolution, such as robotics control and autonomous vehicle navigation, while consuming significantly less bandwidth and computational resources compared to conventional frame-based vision systems.
Strengths: Pioneering event-based technology, high temporal resolution, reduced computational requirements. Weaknesses: Academic focus limits commercialization, complex calibration requirements, limited software ecosystem.
Core Innovations in Neuromorphic Real-Time Data Processing
Novel neuromorphic vision system
PatentPendingUS20230186060A1
Innovation
- A novel neuromorphic vision system integrating a retinomorphic array and a neural network, where the retinomorphic array converts visual information into electrical signals, and the neural network performs processing, with a serial to parallel conversion circuit and a nonvolatile crossbar array for efficient information handling, enabling edge enhancement, noise reduction, and higher-level visual processing.




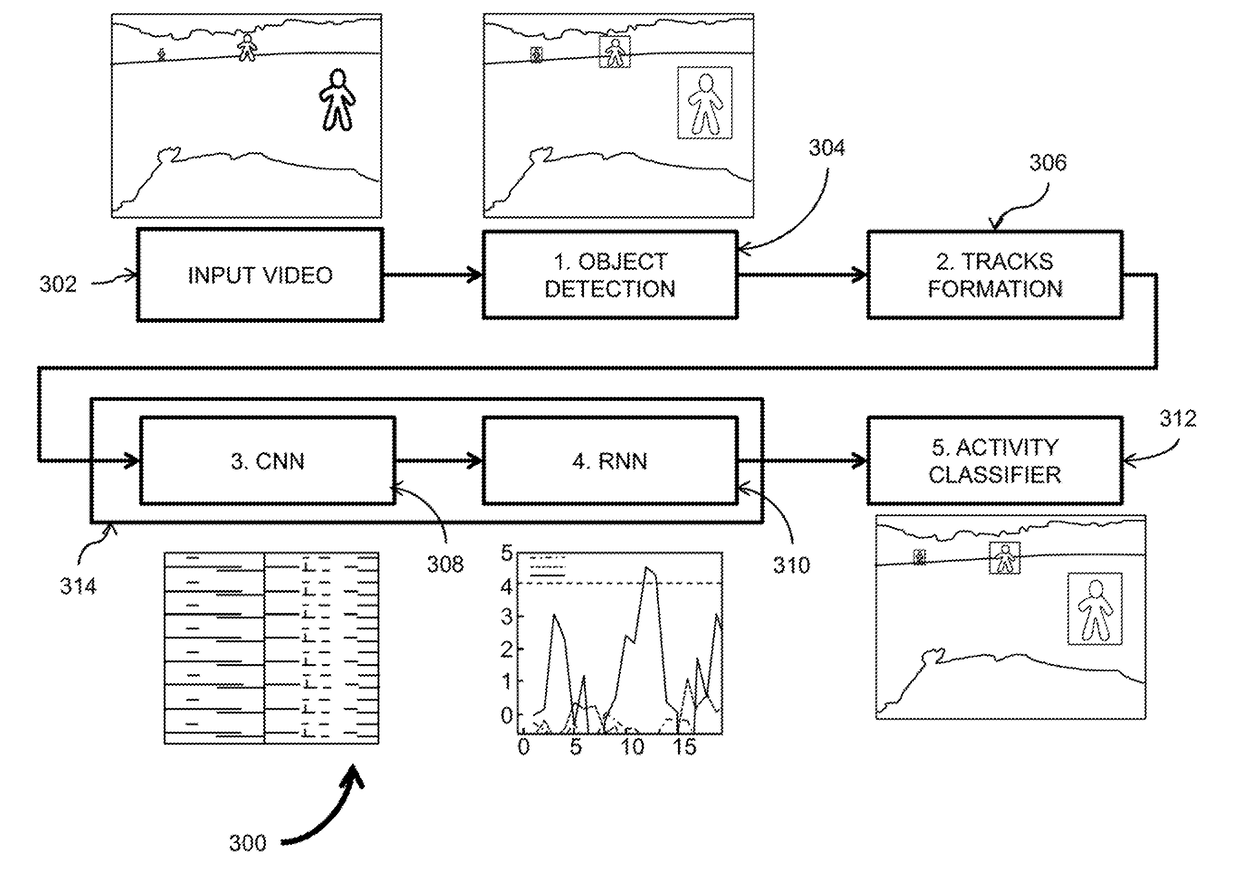
Neuromorphic system for real-time visual activity recognition
PatentActiveUS20180300553A1
Innovation
- A neuromorphic system that uses processors and a memory with executable instructions for detecting objects of interest, forming activity tracks, and performing feature extraction using convolutional and recurrent neural networks to achieve real-time visual activity recognition, capable of operating on diverse platforms and providing alerts or controlling devices based on activity classifications.

Hardware-Software Co-Design for Neuromorphic Systems
The successful implementation of neuromorphic vision systems for real-time data processing fundamentally depends on the seamless integration of specialized hardware architectures with adaptive software frameworks. This co-design approach represents a paradigm shift from traditional von Neumann architectures, where processing and memory are physically separated, toward brain-inspired computing models that enable concurrent computation and storage within the same substrate.
Hardware design considerations center on developing neuromorphic processors that can efficiently handle the asynchronous, event-driven nature of visual data streams. These processors typically incorporate spiking neural network architectures with dedicated silicon neurons and synapses, enabling parallel processing of temporal visual information. The hardware must support variable timing dynamics, adaptive learning mechanisms, and low-power operation while maintaining high throughput for real-time applications.
Software frameworks for neuromorphic vision systems require specialized programming models that can effectively utilize the unique characteristics of neuromorphic hardware. These frameworks must support event-based programming paradigms, dynamic network reconfiguration, and real-time learning algorithms. The software layer needs to abstract hardware complexities while providing developers with intuitive interfaces for implementing vision processing algorithms.
The co-design methodology involves iterative optimization between hardware capabilities and software requirements. Hardware designers must consider the computational demands of neuromorphic algorithms, while software developers need to leverage hardware-specific features such as in-memory computing and spike-timing-dependent plasticity. This collaborative approach ensures optimal resource utilization and performance optimization.
Critical design challenges include establishing efficient communication protocols between neuromorphic cores, implementing standardized programming interfaces, and developing debugging tools for asynchronous systems. The co-design process must also address scalability concerns, ensuring that both hardware and software components can accommodate varying complexity levels of vision processing tasks while maintaining real-time performance constraints.
Emerging co-design trends focus on incorporating machine learning-based optimization techniques to automatically tune hardware-software interfaces, developing cross-platform compatibility standards, and creating modular architectures that support rapid prototyping and deployment of neuromorphic vision applications across diverse industrial and research environments.
Hardware design considerations center on developing neuromorphic processors that can efficiently handle the asynchronous, event-driven nature of visual data streams. These processors typically incorporate spiking neural network architectures with dedicated silicon neurons and synapses, enabling parallel processing of temporal visual information. The hardware must support variable timing dynamics, adaptive learning mechanisms, and low-power operation while maintaining high throughput for real-time applications.
Software frameworks for neuromorphic vision systems require specialized programming models that can effectively utilize the unique characteristics of neuromorphic hardware. These frameworks must support event-based programming paradigms, dynamic network reconfiguration, and real-time learning algorithms. The software layer needs to abstract hardware complexities while providing developers with intuitive interfaces for implementing vision processing algorithms.
The co-design methodology involves iterative optimization between hardware capabilities and software requirements. Hardware designers must consider the computational demands of neuromorphic algorithms, while software developers need to leverage hardware-specific features such as in-memory computing and spike-timing-dependent plasticity. This collaborative approach ensures optimal resource utilization and performance optimization.
Critical design challenges include establishing efficient communication protocols between neuromorphic cores, implementing standardized programming interfaces, and developing debugging tools for asynchronous systems. The co-design process must also address scalability concerns, ensuring that both hardware and software components can accommodate varying complexity levels of vision processing tasks while maintaining real-time performance constraints.
Emerging co-design trends focus on incorporating machine learning-based optimization techniques to automatically tune hardware-software interfaces, developing cross-platform compatibility standards, and creating modular architectures that support rapid prototyping and deployment of neuromorphic vision applications across diverse industrial and research environments.
Energy Efficiency Optimization in Real-Time Vision Processing
Energy efficiency represents a critical bottleneck in deploying neuromorphic vision systems for real-time applications. Traditional digital processors consume substantial power when handling continuous visual data streams, making energy optimization essential for practical implementation in mobile devices, autonomous vehicles, and IoT applications.
Neuromorphic architectures inherently offer significant energy advantages through event-driven processing paradigms. Unlike conventional frame-based systems that process entire images at fixed intervals, neuromorphic sensors generate sparse, asynchronous events only when pixel intensity changes occur. This approach dramatically reduces computational overhead by eliminating redundant processing of static visual information.
Power consumption optimization strategies focus on several key areas. Dynamic voltage and frequency scaling techniques adjust processing power based on real-time workload demands, reducing energy consumption during periods of low visual activity. Clock gating mechanisms selectively disable unused circuit components, while power islands allow independent control of different processing modules.
Memory hierarchy optimization plays a crucial role in energy efficiency. Implementing near-memory computing architectures minimizes data movement between processing units and storage elements, significantly reducing power consumption associated with memory access operations. Advanced cache management strategies and data locality optimization further enhance energy performance.
Algorithmic-level optimizations contribute substantially to energy reduction. Sparse coding techniques exploit the natural sparsity of visual data, while adaptive precision methods dynamically adjust computational accuracy based on application requirements. These approaches maintain processing quality while minimizing unnecessary computations.
Hardware-software co-design methodologies enable comprehensive energy optimization across multiple system layers. Custom instruction sets tailored for neuromorphic operations, specialized accelerators for common vision tasks, and intelligent workload scheduling algorithms collectively maximize energy efficiency while maintaining real-time performance requirements.
Emerging technologies such as memristive devices and in-memory computing architectures promise further energy reductions. These innovations enable direct computation within memory elements, eliminating traditional von Neumann bottlenecks and achieving unprecedented energy efficiency levels for neuromorphic vision processing applications.
Neuromorphic architectures inherently offer significant energy advantages through event-driven processing paradigms. Unlike conventional frame-based systems that process entire images at fixed intervals, neuromorphic sensors generate sparse, asynchronous events only when pixel intensity changes occur. This approach dramatically reduces computational overhead by eliminating redundant processing of static visual information.
Power consumption optimization strategies focus on several key areas. Dynamic voltage and frequency scaling techniques adjust processing power based on real-time workload demands, reducing energy consumption during periods of low visual activity. Clock gating mechanisms selectively disable unused circuit components, while power islands allow independent control of different processing modules.
Memory hierarchy optimization plays a crucial role in energy efficiency. Implementing near-memory computing architectures minimizes data movement between processing units and storage elements, significantly reducing power consumption associated with memory access operations. Advanced cache management strategies and data locality optimization further enhance energy performance.
Algorithmic-level optimizations contribute substantially to energy reduction. Sparse coding techniques exploit the natural sparsity of visual data, while adaptive precision methods dynamically adjust computational accuracy based on application requirements. These approaches maintain processing quality while minimizing unnecessary computations.
Hardware-software co-design methodologies enable comprehensive energy optimization across multiple system layers. Custom instruction sets tailored for neuromorphic operations, specialized accelerators for common vision tasks, and intelligent workload scheduling algorithms collectively maximize energy efficiency while maintaining real-time performance requirements.
Emerging technologies such as memristive devices and in-memory computing architectures promise further energy reductions. These innovations enable direct computation within memory elements, eliminating traditional von Neumann bottlenecks and achieving unprecedented energy efficiency levels for neuromorphic vision processing applications.
Unlock deeper insights with PatSnap Eureka Quick Research — get a full tech report to explore trends and direct your research. Try now!
Generate Your Research Report Instantly with AI Agent
Supercharge your innovation with PatSnap Eureka AI Agent Platform!