

Autonomous Vehicle Sensor Fusion Data Synchronization Issues
MAR 26, 20269 MIN READ
Generate Your Research Report Instantly with AI Agent
Patsnap Eureka helps you evaluate technical feasibility & market potential.
AV Sensor Fusion Background and Sync Objectives
Autonomous vehicle sensor fusion represents a critical technological paradigm that integrates data from multiple sensing modalities to create a comprehensive understanding of the vehicle's environment. This approach combines inputs from cameras, LiDAR, radar, ultrasonic sensors, and inertial measurement units to overcome individual sensor limitations and enhance overall perception accuracy. The fusion process enables vehicles to maintain robust environmental awareness across diverse operating conditions, weather scenarios, and lighting situations.
The evolution of sensor fusion technology has progressed through distinct phases, beginning with basic sensor integration in early driver assistance systems to today's sophisticated multi-modal fusion architectures. Initial implementations focused on simple redundancy and fail-safe mechanisms, while contemporary systems employ advanced algorithms for real-time data correlation, feature extraction, and probabilistic inference. This progression has been driven by increasing computational capabilities, improved sensor technologies, and growing demands for autonomous driving reliability.
Data synchronization emerges as a fundamental challenge within sensor fusion systems due to inherent differences in sensor characteristics, sampling rates, and processing latencies. Each sensor type operates with distinct temporal properties: cameras typically capture at 30-60 Hz, LiDAR systems operate at 10-20 Hz, radar sensors may function at 20-77 Hz, and IMU units can sample at rates exceeding 1000 Hz. These disparate timing characteristics create temporal misalignment issues that can significantly impact fusion accuracy and decision-making reliability.
The primary objective of addressing synchronization challenges is to establish temporal coherence across all sensor inputs, ensuring that fused data represents a consistent snapshot of the environment at any given moment. This involves developing sophisticated timestamp management systems, implementing predictive algorithms to compensate for latency variations, and creating robust interpolation methods for temporal alignment. Achieving precise synchronization is essential for maintaining the integrity of object tracking, motion prediction, and collision avoidance systems.
Furthermore, synchronization objectives extend beyond mere temporal alignment to encompass spatial registration and coordinate system harmonization. The ultimate goal is to create a unified perception framework that can reliably support critical autonomous driving functions while maintaining real-time performance requirements and ensuring passenger safety across all operational scenarios.
The evolution of sensor fusion technology has progressed through distinct phases, beginning with basic sensor integration in early driver assistance systems to today's sophisticated multi-modal fusion architectures. Initial implementations focused on simple redundancy and fail-safe mechanisms, while contemporary systems employ advanced algorithms for real-time data correlation, feature extraction, and probabilistic inference. This progression has been driven by increasing computational capabilities, improved sensor technologies, and growing demands for autonomous driving reliability.
Data synchronization emerges as a fundamental challenge within sensor fusion systems due to inherent differences in sensor characteristics, sampling rates, and processing latencies. Each sensor type operates with distinct temporal properties: cameras typically capture at 30-60 Hz, LiDAR systems operate at 10-20 Hz, radar sensors may function at 20-77 Hz, and IMU units can sample at rates exceeding 1000 Hz. These disparate timing characteristics create temporal misalignment issues that can significantly impact fusion accuracy and decision-making reliability.
The primary objective of addressing synchronization challenges is to establish temporal coherence across all sensor inputs, ensuring that fused data represents a consistent snapshot of the environment at any given moment. This involves developing sophisticated timestamp management systems, implementing predictive algorithms to compensate for latency variations, and creating robust interpolation methods for temporal alignment. Achieving precise synchronization is essential for maintaining the integrity of object tracking, motion prediction, and collision avoidance systems.
Furthermore, synchronization objectives extend beyond mere temporal alignment to encompass spatial registration and coordinate system harmonization. The ultimate goal is to create a unified perception framework that can reliably support critical autonomous driving functions while maintaining real-time performance requirements and ensuring passenger safety across all operational scenarios.
Market Demand for Reliable Autonomous Vehicle Systems
The autonomous vehicle market is experiencing unprecedented growth driven by increasing consumer demand for enhanced safety, convenience, and mobility solutions. Safety concerns represent the primary market driver, as traditional human-operated vehicles are responsible for the majority of traffic accidents due to human error. Consumers and regulatory bodies are increasingly recognizing that reliable autonomous systems could significantly reduce accident rates and save lives.
Urban mobility challenges are creating substantial market pressure for autonomous vehicle deployment. Traffic congestion, parking limitations, and the need for efficient transportation systems in densely populated areas are driving demand for intelligent vehicle solutions. Fleet operators, ride-sharing companies, and logistics providers are particularly interested in autonomous technologies that can reduce operational costs while improving service reliability.
The aging population in developed countries is generating additional market demand for autonomous vehicles. Elderly individuals who may lose the ability to drive safely still require independent mobility solutions. Autonomous vehicles equipped with reliable sensor fusion systems could provide these demographics with continued access to transportation while maintaining safety standards.
Commercial applications are demonstrating strong market appetite for autonomous vehicle technologies. Long-haul trucking companies are investing heavily in autonomous solutions to address driver shortages and reduce operational expenses. Delivery services and logistics companies are exploring autonomous vehicles to meet growing e-commerce demands while managing labor costs.
Regulatory frameworks worldwide are evolving to accommodate autonomous vehicle deployment, creating market opportunities for companies that can demonstrate reliable system performance. Government initiatives and funding programs are supporting the development of autonomous vehicle infrastructure, indicating strong institutional demand for these technologies.
Insurance companies and fleet managers are increasingly demanding robust data synchronization capabilities in autonomous vehicles. Accurate sensor fusion and reliable data processing are essential for liability assessment, accident reconstruction, and operational optimization. This creates a specific market need for solutions that address sensor fusion data synchronization challenges.
The market demand extends beyond individual vehicle sales to encompass entire ecosystem solutions, including maintenance services, software updates, and data management platforms that ensure continued system reliability throughout the vehicle lifecycle.
Urban mobility challenges are creating substantial market pressure for autonomous vehicle deployment. Traffic congestion, parking limitations, and the need for efficient transportation systems in densely populated areas are driving demand for intelligent vehicle solutions. Fleet operators, ride-sharing companies, and logistics providers are particularly interested in autonomous technologies that can reduce operational costs while improving service reliability.
The aging population in developed countries is generating additional market demand for autonomous vehicles. Elderly individuals who may lose the ability to drive safely still require independent mobility solutions. Autonomous vehicles equipped with reliable sensor fusion systems could provide these demographics with continued access to transportation while maintaining safety standards.
Commercial applications are demonstrating strong market appetite for autonomous vehicle technologies. Long-haul trucking companies are investing heavily in autonomous solutions to address driver shortages and reduce operational expenses. Delivery services and logistics companies are exploring autonomous vehicles to meet growing e-commerce demands while managing labor costs.
Regulatory frameworks worldwide are evolving to accommodate autonomous vehicle deployment, creating market opportunities for companies that can demonstrate reliable system performance. Government initiatives and funding programs are supporting the development of autonomous vehicle infrastructure, indicating strong institutional demand for these technologies.
Insurance companies and fleet managers are increasingly demanding robust data synchronization capabilities in autonomous vehicles. Accurate sensor fusion and reliable data processing are essential for liability assessment, accident reconstruction, and operational optimization. This creates a specific market need for solutions that address sensor fusion data synchronization challenges.
The market demand extends beyond individual vehicle sales to encompass entire ecosystem solutions, including maintenance services, software updates, and data management platforms that ensure continued system reliability throughout the vehicle lifecycle.
Current Sync Challenges in Multi-Sensor AV Platforms
Multi-sensor autonomous vehicle platforms face significant synchronization challenges that directly impact the reliability and safety of sensor fusion algorithms. The temporal alignment of data streams from heterogeneous sensors represents one of the most critical technical barriers in current AV implementations. LiDAR systems typically operate at 10-20 Hz refresh rates, while cameras function at 30-60 FPS, and radar sensors may cycle at different frequencies entirely. This fundamental mismatch creates temporal gaps that can result in outdated or misaligned environmental representations.
Hardware-level synchronization issues emerge from the diverse communication protocols and processing latencies inherent in different sensor technologies. Each sensor type exhibits unique data acquisition and transmission delays, ranging from microseconds in solid-state sensors to milliseconds in mechanical scanning systems. The absence of a unified hardware clock across all sensors compounds these timing discrepancies, leading to data packets arriving at the central processing unit with irregular timestamps and variable delays.
Software synchronization algorithms currently struggle with dynamic latency compensation in real-time environments. Traditional timestamp-based alignment methods often fail when sensors experience varying processing loads or environmental interference. The computational overhead required for continuous time synchronization can consume significant processing resources, potentially impacting the real-time performance requirements of safety-critical driving functions.
Network-induced synchronization challenges become particularly pronounced in distributed sensor architectures where multiple ECUs handle different sensor clusters. CAN bus limitations, Ethernet packet delays, and varying network topologies introduce additional timing uncertainties that existing synchronization protocols struggle to accommodate effectively.
Environmental factors further complicate synchronization efforts, as temperature variations, vibrations, and electromagnetic interference can cause sensor timing drift over operational periods. Current calibration procedures often fail to account for these dynamic environmental impacts, resulting in gradual degradation of synchronization accuracy during extended vehicle operation.
The integration of emerging sensor technologies, such as event-based cameras and solid-state LiDAR, introduces new synchronization paradigms that existing fusion frameworks are not designed to handle. These sensors generate asynchronous data streams with fundamentally different temporal characteristics, requiring novel synchronization approaches that current AV platforms have yet to fully address.
Hardware-level synchronization issues emerge from the diverse communication protocols and processing latencies inherent in different sensor technologies. Each sensor type exhibits unique data acquisition and transmission delays, ranging from microseconds in solid-state sensors to milliseconds in mechanical scanning systems. The absence of a unified hardware clock across all sensors compounds these timing discrepancies, leading to data packets arriving at the central processing unit with irregular timestamps and variable delays.
Software synchronization algorithms currently struggle with dynamic latency compensation in real-time environments. Traditional timestamp-based alignment methods often fail when sensors experience varying processing loads or environmental interference. The computational overhead required for continuous time synchronization can consume significant processing resources, potentially impacting the real-time performance requirements of safety-critical driving functions.
Network-induced synchronization challenges become particularly pronounced in distributed sensor architectures where multiple ECUs handle different sensor clusters. CAN bus limitations, Ethernet packet delays, and varying network topologies introduce additional timing uncertainties that existing synchronization protocols struggle to accommodate effectively.
Environmental factors further complicate synchronization efforts, as temperature variations, vibrations, and electromagnetic interference can cause sensor timing drift over operational periods. Current calibration procedures often fail to account for these dynamic environmental impacts, resulting in gradual degradation of synchronization accuracy during extended vehicle operation.
The integration of emerging sensor technologies, such as event-based cameras and solid-state LiDAR, introduces new synchronization paradigms that existing fusion frameworks are not designed to handle. These sensors generate asynchronous data streams with fundamentally different temporal characteristics, requiring novel synchronization approaches that current AV platforms have yet to fully address.
Existing Data Sync Solutions for Multi-Sensor Systems
01 Hardware-based timestamp synchronization methods
Synchronization techniques that utilize hardware components such as dedicated clock circuits, GPS receivers, or precision timing modules to generate and align timestamps across multiple sensors. These methods ensure accurate time alignment by leveraging hardware-level clock signals and interrupt mechanisms to minimize latency and jitter in multi-sensor systems.- Hardware-based timestamp synchronization methods: Synchronization techniques that utilize hardware components such as dedicated timing circuits, clock generators, or specialized synchronization modules to align data from multiple sensors. These methods often employ precise timing signals and hardware triggers to ensure accurate temporal alignment of sensor data streams, minimizing latency and jitter in multi-sensor systems.
- Software-based time alignment algorithms: Algorithmic approaches for synchronizing sensor data through software processing, including interpolation methods, timestamp correction algorithms, and buffer management techniques. These solutions process asynchronous data streams and apply computational methods to align temporal information from different sensors operating at varying sampling rates or with different latencies.
- Network time protocol and distributed synchronization: Methods for synchronizing sensor data across distributed systems or networked sensor arrays using time distribution protocols. These approaches handle clock drift compensation, network delay estimation, and maintain temporal coherence across multiple devices or sensor nodes that may be geographically separated or connected through various communication channels.
- Multi-rate sensor data fusion with temporal calibration: Techniques for fusing data from sensors operating at different sampling frequencies while maintaining temporal accuracy. These methods address challenges of combining high-rate and low-rate sensor outputs, performing rate conversion, and ensuring proper temporal registration when integrating heterogeneous sensor data with varying update rates and timing characteristics.
- Event-driven and trigger-based synchronization mechanisms: Synchronization approaches that use event detection, trigger signals, or specific conditions to coordinate data capture and alignment across multiple sensors. These mechanisms enable precise temporal correlation by initiating synchronized data acquisition based on detected events, external triggers, or predefined conditions rather than relying solely on periodic sampling.
02 Software-based data alignment algorithms
Algorithmic approaches that perform post-processing synchronization of sensor data streams through interpolation, resampling, or correlation techniques. These methods analyze temporal characteristics of incoming data and apply mathematical transformations to align measurements from sensors with different sampling rates or latencies, enabling coherent fusion without requiring hardware modifications.Expand Specific Solutions03 Network time protocol and distributed synchronization
Synchronization frameworks that employ network-based timing protocols to coordinate multiple distributed sensors or sensor nodes. These systems utilize master-slave clock architectures, time-stamping servers, or peer-to-peer synchronization protocols to maintain temporal consistency across spatially separated sensing units, particularly relevant for wireless sensor networks and IoT applications.Expand Specific Solutions04 Buffer management and data queuing strategies
Techniques for managing temporal misalignment through intelligent buffering and queuing mechanisms that store sensor data with associated timestamps. These approaches implement FIFO or priority-based queues to hold early-arriving data while waiting for delayed measurements, enabling synchronized data packets to be formed and processed together despite varying sensor latencies and communication delays.Expand Specific Solutions05 Adaptive synchronization with dynamic calibration
Advanced synchronization systems that continuously monitor and adapt to changing temporal offsets between sensors through dynamic calibration procedures. These methods detect clock drift, varying latencies, and environmental factors that affect timing, then automatically adjust synchronization parameters to maintain alignment accuracy over extended operation periods in real-world deployment scenarios.Expand Specific Solutions
Key Players in AV Sensor and Fusion Technology
The autonomous vehicle sensor fusion data synchronization market represents a rapidly evolving sector within the broader autonomous driving ecosystem, currently in its growth phase with significant technological advancement opportunities. The market demonstrates substantial scale potential, driven by increasing investments from both traditional automotive manufacturers like BMW, Renault, and Chinese automakers including Geely and FAW, alongside specialized autonomous driving companies such as Waymo, TuSimple, and Motional. Technology maturity varies significantly across players, with established companies like Bosch and Mitsubishi Electric leveraging decades of automotive electronics expertise, while newer entrants like AutoX, Momenta, and Xiaomo Zhixing focus specifically on AI-driven solutions. The competitive landscape shows a clear division between hardware-focused suppliers developing robust sensor integration platforms and software-centric companies creating advanced synchronization algorithms, indicating the market's transition from experimental phase toward commercial viability.
Baidu USA LLC
Technical Solution: Baidu's Apollo platform incorporates a distributed sensor fusion framework that tackles synchronization challenges through software-based temporal alignment algorithms and hardware clock distribution systems. Their approach utilizes predictive buffering and interpolation techniques to handle sensor data arriving at different timestamps, while implementing real-time calibration procedures to maintain synchronization accuracy. The system supports heterogeneous sensor arrays and provides APIs for third-party sensor integration with standardized timing protocols.
Strengths: Open-source ecosystem with flexible integration capabilities and strong AI-driven compensation algorithms. Weaknesses: Requires significant computational resources and may have reduced performance in extreme weather conditions.
Bayerische Motoren Werke AG
Technical Solution: BMW has implemented an integrated sensor fusion architecture within their autonomous driving systems that addresses synchronization through centralized timing control units and distributed sensor preprocessing modules. Their solution employs hardware-synchronized data acquisition with dedicated timing circuits that ensure consistent timestamping across LiDAR, camera, and radar sensors. The system incorporates adaptive synchronization algorithms that dynamically adjust for sensor-specific latencies and processing delays while maintaining real-time performance requirements for safety-critical applications.
Strengths: Automotive-grade reliability with integrated vehicle system optimization and proven safety standards. Weaknesses: Limited adaptability to non-BMW platforms and high integration complexity for aftermarket solutions.
Core Innovations in Real-Time Sensor Data Alignment
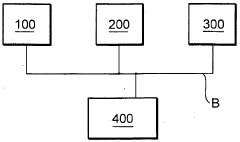
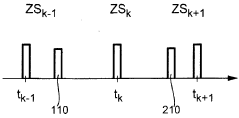
Automobile sensing data synchronous acquisition method, device, equipment and medium thereof
PatentPendingCN117630943A
Innovation
- The radar module synchronizes the vehicle time with the automotive communication system. The MCU module controls the SOC module and the image acquisition module to collect data synchronously. The timer and compensation algorithm are used to achieve precise synchronization of radar data and image data.



Method for the temporal synchronisation of a plurality of vehicle sensors
PatentWO2003008996A1
Innovation
- A method and device for synchronizing sensor data from multiple environment sensors to a common time base using a sensor data fusion unit, where the cycle time is determined by subtracting transmission and sensor dead times from arrival timestamps, allowing for precise conversion of measurement data to a uniform time basis, enabling retrodictive or predictive synchronization.
Safety Standards for Autonomous Vehicle Systems
Safety standards for autonomous vehicle systems represent a critical framework that directly addresses sensor fusion data synchronization challenges. The International Organization for Standardization (ISO) 26262 functional safety standard serves as the foundational requirement, mandating systematic approaches to identify, assess, and mitigate risks associated with sensor data timing discrepancies. This standard requires automotive manufacturers to implement fail-safe mechanisms when synchronization failures occur between LiDAR, camera, radar, and GPS sensors.
The Society of Automotive Engineers (SAE) J3016 standard defines automation levels that inherently depend on reliable sensor fusion capabilities. Higher automation levels demand stricter synchronization tolerances, with Level 4 and Level 5 systems requiring sub-millisecond timing accuracy across all sensor inputs. The standard establishes performance benchmarks that directly influence how manufacturers approach data synchronization architectures.
Emerging safety protocols specifically target temporal alignment issues in multi-sensor environments. The ISO/PAS 21448 standard for Safety of the Intended Functionality (SOTIF) addresses scenarios where sensor fusion algorithms may produce unsafe outcomes despite individual sensors functioning correctly. This standard mandates comprehensive validation of synchronization algorithms under various environmental conditions and system load scenarios.
Regional regulatory frameworks impose additional synchronization requirements. The European Union's Type Approval Framework requires demonstration of sensor fusion reliability under electromagnetic interference conditions that can disrupt timing signals. Similarly, the United States Department of Transportation guidelines emphasize real-time performance validation for sensor synchronization systems.
Industry-specific safety standards are evolving to address edge cases in sensor fusion timing. The Automotive Safety Integrity Level (ASIL) classifications now include specific requirements for temporal coherence in sensor data streams. ASIL-D systems must maintain synchronization even during partial sensor failures, requiring redundant timing mechanisms and graceful degradation protocols that preserve vehicle safety while managing data latency variations across different sensor modalities.
The Society of Automotive Engineers (SAE) J3016 standard defines automation levels that inherently depend on reliable sensor fusion capabilities. Higher automation levels demand stricter synchronization tolerances, with Level 4 and Level 5 systems requiring sub-millisecond timing accuracy across all sensor inputs. The standard establishes performance benchmarks that directly influence how manufacturers approach data synchronization architectures.
Emerging safety protocols specifically target temporal alignment issues in multi-sensor environments. The ISO/PAS 21448 standard for Safety of the Intended Functionality (SOTIF) addresses scenarios where sensor fusion algorithms may produce unsafe outcomes despite individual sensors functioning correctly. This standard mandates comprehensive validation of synchronization algorithms under various environmental conditions and system load scenarios.
Regional regulatory frameworks impose additional synchronization requirements. The European Union's Type Approval Framework requires demonstration of sensor fusion reliability under electromagnetic interference conditions that can disrupt timing signals. Similarly, the United States Department of Transportation guidelines emphasize real-time performance validation for sensor synchronization systems.
Industry-specific safety standards are evolving to address edge cases in sensor fusion timing. The Automotive Safety Integrity Level (ASIL) classifications now include specific requirements for temporal coherence in sensor data streams. ASIL-D systems must maintain synchronization even during partial sensor failures, requiring redundant timing mechanisms and graceful degradation protocols that preserve vehicle safety while managing data latency variations across different sensor modalities.
Cybersecurity in Connected Vehicle Architectures
The cybersecurity landscape in connected vehicle architectures presents unique challenges when addressing sensor fusion data synchronization issues. As autonomous vehicles increasingly rely on real-time data integration from multiple sensors, the attack surface expands significantly, creating vulnerabilities that malicious actors can exploit to disrupt synchronization processes.
Connected vehicle architectures face sophisticated cyber threats targeting the communication channels between sensors and central processing units. Man-in-the-middle attacks can intercept and manipulate timestamp data, causing deliberate desynchronization that compromises the vehicle's perception system. Additionally, denial-of-service attacks on specific sensor nodes can create artificial latency variations, forcing the fusion algorithms to operate with incomplete or delayed data streams.
The distributed nature of sensor networks in autonomous vehicles introduces multiple entry points for cybersecurity breaches. Each sensor interface, whether LiDAR, camera, radar, or GPS, represents a potential vulnerability that attackers can leverage to inject false timing information or corrupt synchronization protocols. The challenge intensifies when considering vehicle-to-everything communication, where external data sources must be authenticated and synchronized with internal sensor streams.
Encryption and authentication mechanisms play crucial roles in securing synchronized data flows, but they introduce additional computational overhead that can affect real-time performance requirements. The implementation of secure time synchronization protocols, such as authenticated Network Time Protocol variants, becomes essential to maintain both security and temporal accuracy across the sensor network.
Advanced persistent threats targeting autonomous vehicle fleets pose long-term risks to synchronization integrity. These sophisticated attacks can remain dormant within vehicle systems, gradually degrading synchronization accuracy over time or activating during critical driving scenarios. The interconnected nature of modern vehicle architectures means that a compromise in one vehicle's synchronization system could potentially propagate across entire fleets through shared infrastructure or over-the-air update mechanisms.
Implementing robust cybersecurity measures requires a multi-layered approach that encompasses hardware-level security modules, encrypted communication protocols, and continuous monitoring systems capable of detecting synchronization anomalies that may indicate ongoing cyber attacks.
Connected vehicle architectures face sophisticated cyber threats targeting the communication channels between sensors and central processing units. Man-in-the-middle attacks can intercept and manipulate timestamp data, causing deliberate desynchronization that compromises the vehicle's perception system. Additionally, denial-of-service attacks on specific sensor nodes can create artificial latency variations, forcing the fusion algorithms to operate with incomplete or delayed data streams.
The distributed nature of sensor networks in autonomous vehicles introduces multiple entry points for cybersecurity breaches. Each sensor interface, whether LiDAR, camera, radar, or GPS, represents a potential vulnerability that attackers can leverage to inject false timing information or corrupt synchronization protocols. The challenge intensifies when considering vehicle-to-everything communication, where external data sources must be authenticated and synchronized with internal sensor streams.
Encryption and authentication mechanisms play crucial roles in securing synchronized data flows, but they introduce additional computational overhead that can affect real-time performance requirements. The implementation of secure time synchronization protocols, such as authenticated Network Time Protocol variants, becomes essential to maintain both security and temporal accuracy across the sensor network.
Advanced persistent threats targeting autonomous vehicle fleets pose long-term risks to synchronization integrity. These sophisticated attacks can remain dormant within vehicle systems, gradually degrading synchronization accuracy over time or activating during critical driving scenarios. The interconnected nature of modern vehicle architectures means that a compromise in one vehicle's synchronization system could potentially propagate across entire fleets through shared infrastructure or over-the-air update mechanisms.
Implementing robust cybersecurity measures requires a multi-layered approach that encompasses hardware-level security modules, encrypted communication protocols, and continuous monitoring systems capable of detecting synchronization anomalies that may indicate ongoing cyber attacks.
Unlock deeper insights with Patsnap Eureka Quick Research — get a full tech report to explore trends and direct your research. Try now!
Generate Your Research Report Instantly with AI Agent
Supercharge your innovation with Patsnap Eureka AI Agent Platform!