

Compare Force Control vs Impedance: stability margin in contact
MAY 8, 20269 MIN READ
Generate Your Research Report Instantly with AI Agent
PatSnap Eureka helps you evaluate technical feasibility & market potential.
Force vs Impedance Control Background and Objectives
Force control and impedance control represent two fundamental paradigms in robotic manipulation that have evolved to address the critical challenge of stable physical interaction between robots and their environment. The development of these control strategies emerged from the recognition that traditional position-based control systems are inadequate for tasks involving contact forces, where maintaining stability margins becomes paramount for safe and effective operation.
The historical evolution of contact control began in the 1980s when researchers identified the limitations of pure position control in contact scenarios. Force control was initially developed as a direct approach to regulate contact forces by measuring and controlling the forces exerted by the robot on the environment. This method provided explicit force regulation but often suffered from stability issues due to the inherent delays and noise in force sensing systems.
Impedance control emerged as an alternative paradigm that focuses on regulating the dynamic relationship between motion and force rather than controlling forces directly. This approach, pioneered by Hogan, treats the robot as a mechanical impedance that can be programmed to exhibit desired dynamic behavior during contact interactions. The fundamental distinction lies in impedance control's ability to maintain stability even in the presence of environmental uncertainties and sensor noise.
The stability margin in contact scenarios has become a central concern as robotic systems increasingly operate in unstructured environments where contact interactions are inevitable. Traditional control approaches often exhibit poor stability margins when transitioning between free space and contact conditions, leading to potential system instability, excessive contact forces, or task failure.
Current technological objectives focus on developing robust control strategies that can guarantee sufficient stability margins across varying contact conditions while maintaining precise force regulation capabilities. The challenge lies in balancing the competing requirements of force accuracy, system stability, and dynamic response characteristics.
The comparative analysis of force control versus impedance control in terms of stability margins represents a critical research area that directly impacts the deployment of robotic systems in manufacturing, healthcare, and service applications. Understanding the fundamental trade-offs between these approaches is essential for developing next-generation contact control systems that can operate reliably in complex, dynamic environments while ensuring both performance and safety requirements are met.
The historical evolution of contact control began in the 1980s when researchers identified the limitations of pure position control in contact scenarios. Force control was initially developed as a direct approach to regulate contact forces by measuring and controlling the forces exerted by the robot on the environment. This method provided explicit force regulation but often suffered from stability issues due to the inherent delays and noise in force sensing systems.
Impedance control emerged as an alternative paradigm that focuses on regulating the dynamic relationship between motion and force rather than controlling forces directly. This approach, pioneered by Hogan, treats the robot as a mechanical impedance that can be programmed to exhibit desired dynamic behavior during contact interactions. The fundamental distinction lies in impedance control's ability to maintain stability even in the presence of environmental uncertainties and sensor noise.
The stability margin in contact scenarios has become a central concern as robotic systems increasingly operate in unstructured environments where contact interactions are inevitable. Traditional control approaches often exhibit poor stability margins when transitioning between free space and contact conditions, leading to potential system instability, excessive contact forces, or task failure.
Current technological objectives focus on developing robust control strategies that can guarantee sufficient stability margins across varying contact conditions while maintaining precise force regulation capabilities. The challenge lies in balancing the competing requirements of force accuracy, system stability, and dynamic response characteristics.
The comparative analysis of force control versus impedance control in terms of stability margins represents a critical research area that directly impacts the deployment of robotic systems in manufacturing, healthcare, and service applications. Understanding the fundamental trade-offs between these approaches is essential for developing next-generation contact control systems that can operate reliably in complex, dynamic environments while ensuring both performance and safety requirements are met.
Market Demand for Stable Contact Control Systems
The global robotics market is experiencing unprecedented growth, driven by increasing automation demands across manufacturing, healthcare, service, and emerging sectors. This expansion has created substantial market demand for stable contact control systems that can reliably manage physical interactions between robots and their environments. Industries requiring precise force management and safe human-robot collaboration are particularly driving this demand.
Manufacturing sectors represent the largest market segment for stable contact control technologies. Automotive assembly lines, electronics manufacturing, and precision machining operations require robots capable of maintaining consistent contact forces while ensuring operational stability. These applications demand control systems that can seamlessly transition between free-space motion and contact tasks without compromising safety or precision.
Healthcare and medical robotics constitute a rapidly expanding market segment where stability margins in contact control are critical. Surgical robots, rehabilitation devices, and assistive technologies require exceptionally stable force and impedance control to ensure patient safety. The growing aging population and increasing acceptance of robotic medical interventions are significantly expanding market opportunities in this sector.
Service robotics applications, including domestic cleaning robots, elderly care assistants, and hospitality robots, are creating new market demands for robust contact control systems. These applications require adaptive control strategies that can handle unpredictable contact scenarios while maintaining system stability across diverse environmental conditions.
The collaborative robotics market segment is experiencing particularly strong growth, with cobots requiring sophisticated contact control capabilities to work safely alongside humans. Market demand is shifting toward systems that can dynamically adjust impedance parameters while maintaining guaranteed stability margins during unexpected contact events.
Industrial quality control and inspection applications are driving demand for contact control systems capable of maintaining consistent probe forces during measurement tasks. These applications require high-precision force regulation with minimal overshoot and excellent disturbance rejection capabilities.
Emerging applications in construction robotics, agricultural automation, and space exploration are creating new market niches for specialized contact control solutions. These sectors require robust systems capable of maintaining stability under extreme environmental conditions and handling highly variable contact dynamics.
Market growth is further accelerated by increasing regulatory requirements for safety in human-robot interaction scenarios, driving demand for control systems with provable stability guarantees and predictable contact behavior across operational envelopes.
Manufacturing sectors represent the largest market segment for stable contact control technologies. Automotive assembly lines, electronics manufacturing, and precision machining operations require robots capable of maintaining consistent contact forces while ensuring operational stability. These applications demand control systems that can seamlessly transition between free-space motion and contact tasks without compromising safety or precision.
Healthcare and medical robotics constitute a rapidly expanding market segment where stability margins in contact control are critical. Surgical robots, rehabilitation devices, and assistive technologies require exceptionally stable force and impedance control to ensure patient safety. The growing aging population and increasing acceptance of robotic medical interventions are significantly expanding market opportunities in this sector.
Service robotics applications, including domestic cleaning robots, elderly care assistants, and hospitality robots, are creating new market demands for robust contact control systems. These applications require adaptive control strategies that can handle unpredictable contact scenarios while maintaining system stability across diverse environmental conditions.
The collaborative robotics market segment is experiencing particularly strong growth, with cobots requiring sophisticated contact control capabilities to work safely alongside humans. Market demand is shifting toward systems that can dynamically adjust impedance parameters while maintaining guaranteed stability margins during unexpected contact events.
Industrial quality control and inspection applications are driving demand for contact control systems capable of maintaining consistent probe forces during measurement tasks. These applications require high-precision force regulation with minimal overshoot and excellent disturbance rejection capabilities.
Emerging applications in construction robotics, agricultural automation, and space exploration are creating new market niches for specialized contact control solutions. These sectors require robust systems capable of maintaining stability under extreme environmental conditions and handling highly variable contact dynamics.
Market growth is further accelerated by increasing regulatory requirements for safety in human-robot interaction scenarios, driving demand for control systems with provable stability guarantees and predictable contact behavior across operational envelopes.
Current Stability Challenges in Contact Control Methods
Contact control methods in robotics face fundamental stability challenges that stem from the inherent complexity of managing dynamic interactions between robotic systems and their environments. The transition from free-space motion to contact scenarios introduces discontinuities and uncertainties that significantly complicate control system design and implementation.
Force control systems encounter stability issues primarily due to sensor noise, communication delays, and the stiffness characteristics of the contact environment. High-gain force controllers can become unstable when interacting with rigid surfaces, leading to chattering and oscillatory behavior. The feedback loop's sensitivity to force measurement errors creates a trade-off between tracking performance and system stability, particularly when dealing with unknown or varying environmental stiffness.
Impedance control methods, while offering improved stability margins in many scenarios, face their own set of challenges. The selection of appropriate impedance parameters remains a critical issue, as improper tuning can result in either excessive compliance that compromises task performance or excessive stiffness that reduces stability margins. The coupling between translational and rotational impedance parameters further complicates the stability analysis, especially in multi-degree-of-freedom applications.
Environmental uncertainty represents a major stability challenge for both control approaches. Sudden changes in contact conditions, such as transitions between different surface materials or unexpected contact loss, can destabilize the control system. The inability to accurately model contact dynamics in real-time creates persistent uncertainties that affect stability guarantees.
Passivity-based stability analysis has emerged as a crucial framework for addressing these challenges, yet practical implementation often requires conservative parameter selection that limits performance. The gap between theoretical stability guarantees and real-world robustness remains a significant concern, particularly in applications requiring high precision and reliability.
Time delays in the control loop, whether from sensor processing, communication networks, or computational overhead, introduce additional stability constraints. These delays can transform stable systems into unstable ones, necessitating careful consideration of the entire control architecture's temporal characteristics.
Force control systems encounter stability issues primarily due to sensor noise, communication delays, and the stiffness characteristics of the contact environment. High-gain force controllers can become unstable when interacting with rigid surfaces, leading to chattering and oscillatory behavior. The feedback loop's sensitivity to force measurement errors creates a trade-off between tracking performance and system stability, particularly when dealing with unknown or varying environmental stiffness.
Impedance control methods, while offering improved stability margins in many scenarios, face their own set of challenges. The selection of appropriate impedance parameters remains a critical issue, as improper tuning can result in either excessive compliance that compromises task performance or excessive stiffness that reduces stability margins. The coupling between translational and rotational impedance parameters further complicates the stability analysis, especially in multi-degree-of-freedom applications.
Environmental uncertainty represents a major stability challenge for both control approaches. Sudden changes in contact conditions, such as transitions between different surface materials or unexpected contact loss, can destabilize the control system. The inability to accurately model contact dynamics in real-time creates persistent uncertainties that affect stability guarantees.
Passivity-based stability analysis has emerged as a crucial framework for addressing these challenges, yet practical implementation often requires conservative parameter selection that limits performance. The gap between theoretical stability guarantees and real-world robustness remains a significant concern, particularly in applications requiring high precision and reliability.
Time delays in the control loop, whether from sensor processing, communication networks, or computational overhead, introduce additional stability constraints. These delays can transform stable systems into unstable ones, necessitating careful consideration of the entire control architecture's temporal characteristics.
Existing Stability Analysis Solutions for Contact Control
01 Adaptive impedance control algorithms for stability enhancement
Advanced adaptive algorithms are employed to dynamically adjust impedance parameters in real-time to maintain system stability. These methods utilize feedback mechanisms and parameter estimation techniques to continuously optimize the impedance control performance and ensure stable operation under varying conditions and disturbances.- Adaptive impedance control algorithms for stability enhancement: Advanced adaptive algorithms are employed to dynamically adjust impedance parameters in real-time to maintain system stability. These methods utilize feedback mechanisms and parameter estimation techniques to continuously optimize the impedance control performance and ensure stable operation under varying conditions. The algorithms can automatically tune stiffness and damping parameters based on environmental interactions and system dynamics.
- Force feedback control with stability margin optimization: Force control systems incorporate stability margin optimization techniques to ensure robust performance during contact operations. These approaches focus on maintaining adequate phase and gain margins while providing precise force regulation. The methods include compensation strategies and controller design techniques that enhance the stability characteristics of force-controlled systems.
- Hybrid force-impedance control architectures: Integrated control architectures combine force and impedance control strategies to achieve superior stability performance. These hybrid approaches leverage the advantages of both control methods, switching between or blending force and impedance control modes based on task requirements and system conditions. The architectures provide enhanced robustness and stability margins across different operational scenarios.
- Stability analysis and margin calculation methods: Systematic approaches for analyzing and calculating stability margins in force and impedance controlled systems are developed. These methods include mathematical frameworks for evaluating system stability, determining critical stability boundaries, and predicting system behavior under various operating conditions. The techniques provide quantitative measures of stability margins and guidelines for controller parameter selection.
- Robust control design for uncertain environments: Control design methodologies specifically address uncertainty and disturbances in force and impedance control applications. These robust control techniques maintain stability margins even when system parameters vary or external disturbances are present. The approaches include uncertainty modeling, disturbance rejection strategies, and adaptive compensation methods that ensure consistent performance across different operating conditions.
02 Force feedback integration with impedance control systems
Integration of force sensing and feedback mechanisms with impedance control to improve stability margins. This approach combines direct force measurements with impedance-based control strategies to achieve better tracking performance and enhanced stability characteristics in robotic and automation applications.Expand Specific Solutions03 Stability analysis and margin calculation methods
Mathematical frameworks and computational methods for analyzing stability margins in force and impedance control systems. These techniques involve eigenvalue analysis, Lyapunov stability criteria, and frequency domain approaches to quantify and predict system stability under different operating conditions.Expand Specific Solutions04 Multi-degree-of-freedom control coordination
Coordination strategies for managing force and impedance control across multiple degrees of freedom while maintaining overall system stability. These methods address the coupling effects between different axes and ensure that stability margins are preserved when controlling complex multi-joint systems.Expand Specific Solutions05 Robust control design for uncertain environments
Robust control methodologies that maintain stability margins despite parameter uncertainties and external disturbances. These approaches incorporate uncertainty modeling and robust design principles to ensure consistent performance and stability even when system parameters vary or environmental conditions change.Expand Specific Solutions
Key Players in Robotic Contact Control Industry
The force control versus impedance control comparison in contact stability represents a mature technological domain within the broader robotics and automation industry, which has reached significant market scale exceeding $50 billion globally. The technology demonstrates high maturity levels, evidenced by established implementations across major industrial players including Toyota Motor Corp., YASKAWA Electric Corp., and Robert Bosch GmbH in manufacturing automation, while specialized companies like ATI Industrial Automation and Motion Lib focus on advanced force sensing and haptic control solutions. Research institutions such as Tsinghua University, Karlsruhe Institute of Technology, and Keio University continue advancing theoretical foundations, while medical robotics companies like CMR Surgical and MAKO Surgical demonstrate practical applications in precision contact scenarios, indicating widespread commercial adoption and ongoing innovation in contact stability methodologies.
Toyota Motor Corp.
Technical Solution: Toyota implements hybrid force-impedance control strategies in their robotic manufacturing systems, particularly for automotive assembly operations. Their approach combines force feedback control with impedance modulation to maintain stable contact during part insertion and assembly tasks. The system dynamically adjusts impedance parameters based on contact force measurements, ensuring robust performance across varying contact conditions. Toyota's control architecture incorporates adaptive algorithms that modify both stiffness and damping parameters in real-time, providing enhanced stability margins during contact transitions. This dual-mode approach allows for precise force regulation while maintaining compliant behavior during unexpected contact variations.
Strengths: Proven industrial reliability and extensive real-world validation in manufacturing environments. Weaknesses: Limited adaptability to highly dynamic contact scenarios and complex geometries.
YASKAWA Electric Corp.
Technical Solution: YASKAWA's servo control technology employs advanced force control algorithms with integrated impedance characteristics for industrial robotics applications. Their SIGMA-X series incorporates dual-loop control architecture combining inner force control loops with outer impedance control, optimizing stability margins during contact operations. The system utilizes high-resolution force sensors and real-time parameter adaptation to maintain stable contact across varying surface conditions. YASKAWA's approach emphasizes frequency domain analysis to ensure adequate phase and gain margins, particularly during contact transitions. Their control strategy includes predictive algorithms that anticipate contact changes and pre-adjust impedance parameters to maintain system stability throughout the interaction.
Strengths: High-precision servo control with excellent frequency response characteristics and robust industrial implementation. Weaknesses: Higher complexity in parameter tuning and potential sensitivity to sensor noise.
Core Stability Margin Analysis Patents and Research
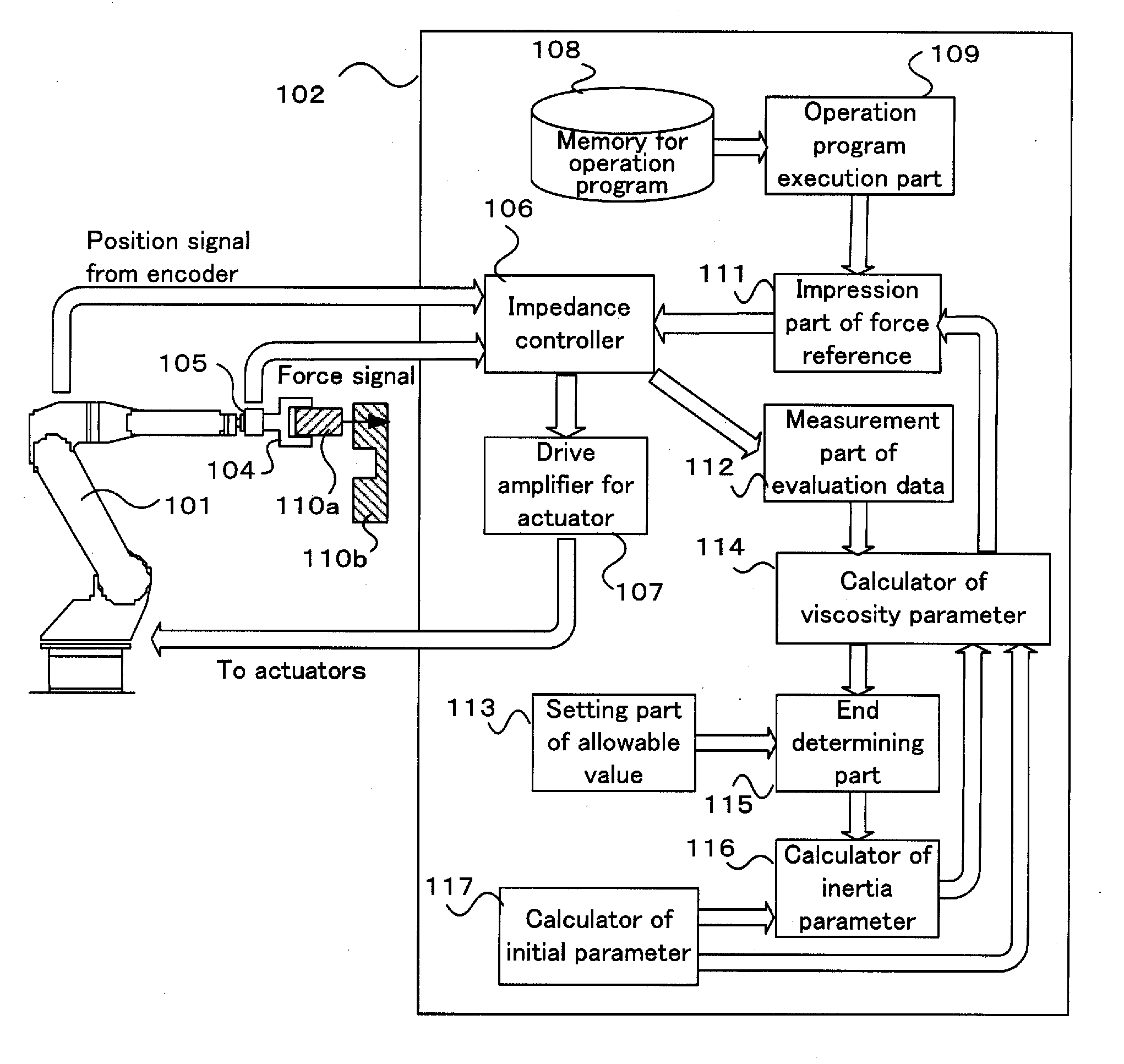
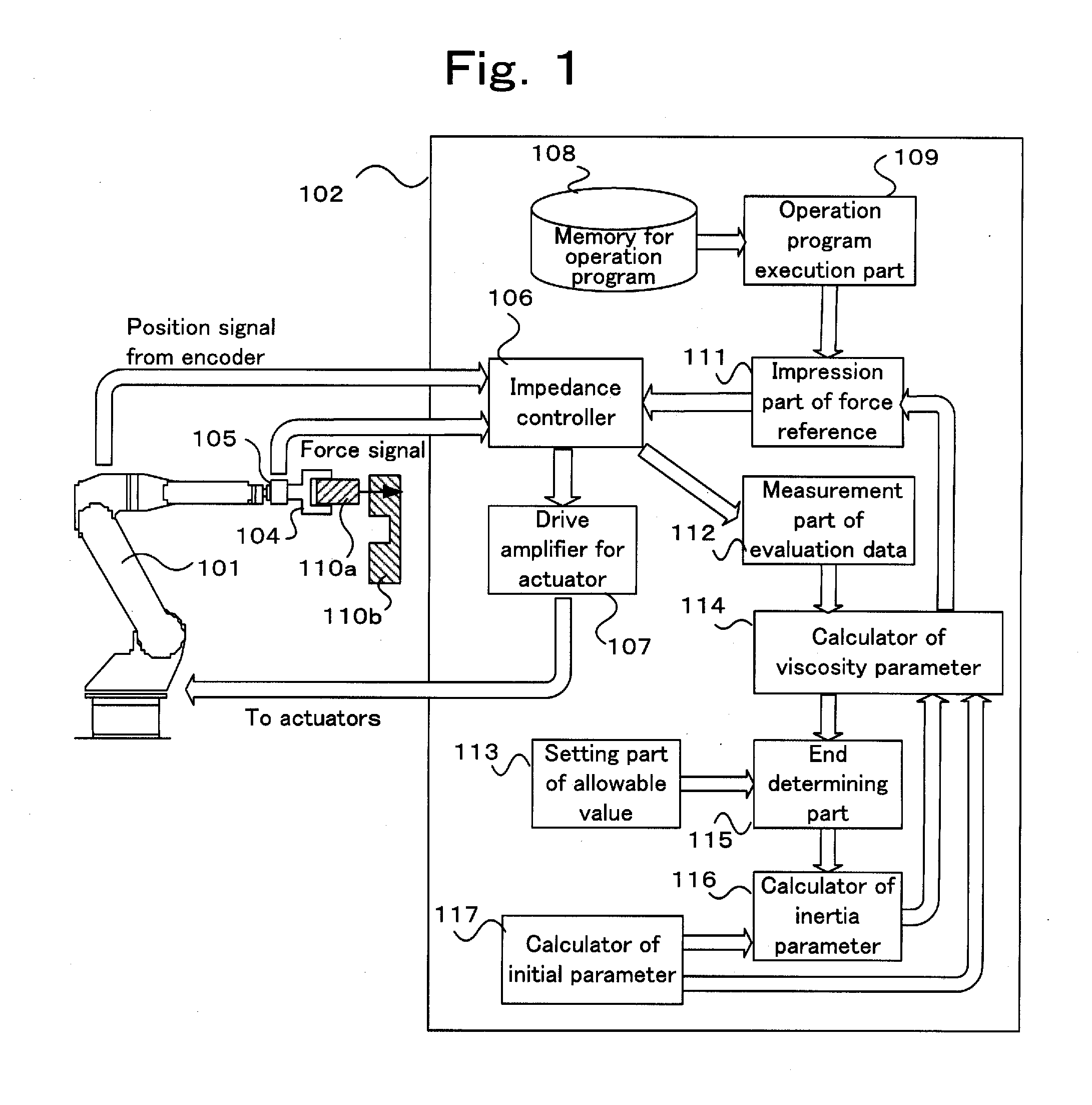
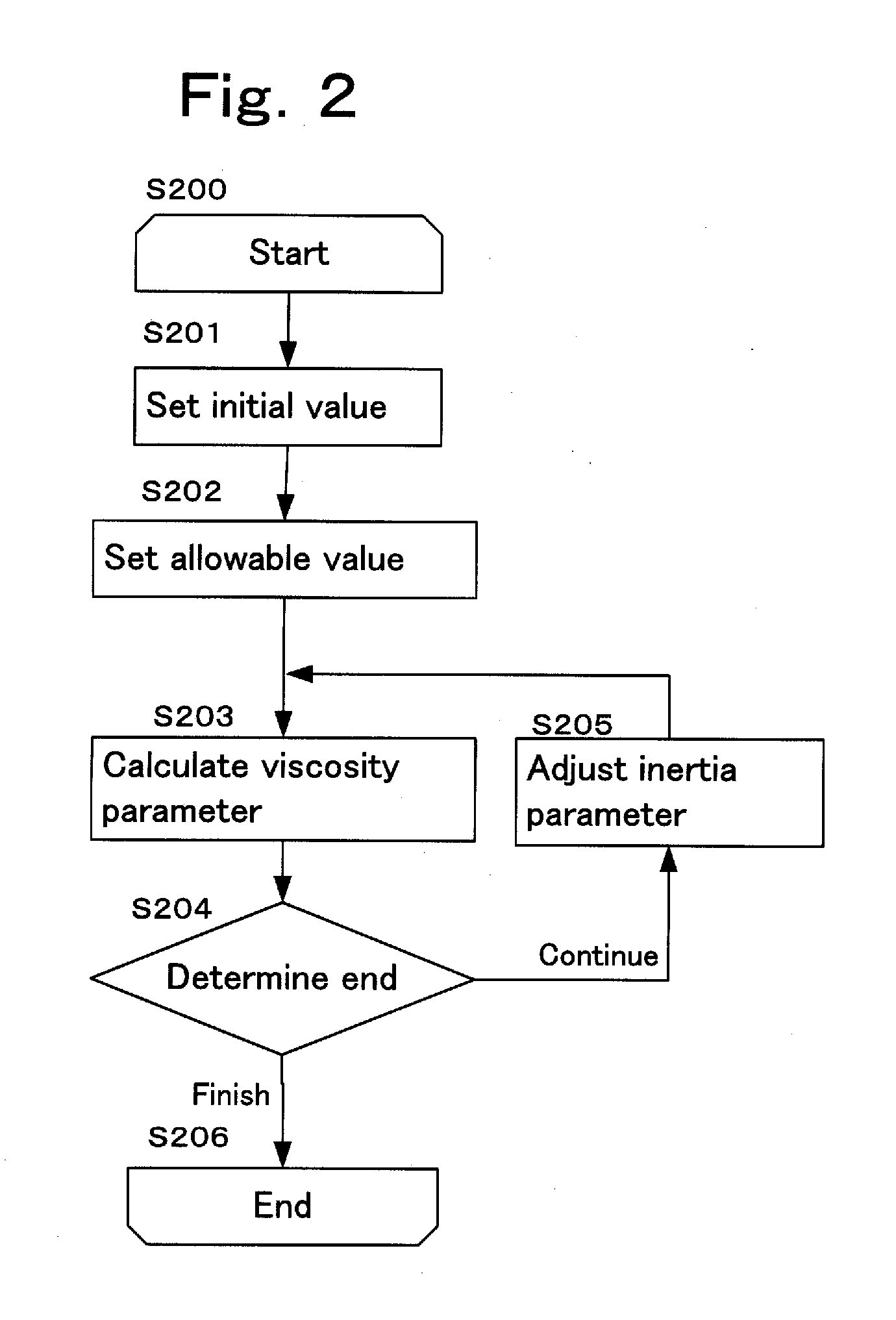
Apparatus and method for adjusting parameter of impedance control
PatentInactiveUS20110093120A1
Innovation
- An apparatus and method that automatically adjusts impedance control parameters by calculating initial values for inertia and viscosity parameters using a force sensor, with a force reference impression part, evaluation data measurement, and calculators to determine optimal settings through repetitive pressing and feedback analysis, allowing for automatic adjustment of overshoot and setting time allowable values.

Robotic system and method for backdriving the same
PatentWO2017083163A1
Innovation
- A robotic system and method that simulate dynamics using a virtual rigid body with a virtual mass, allowing the controller to determine expected and actual joint torques, compute angular acceleration, and project it to determine external forces, thereby enhancing control and predictability by accounting for the location of applied forces in a virtual simulation.




Safety Standards for Contact Control Applications
Safety standards for contact control applications represent a critical framework governing the deployment of robotic systems in environments where physical interaction with humans or sensitive objects occurs. These standards establish fundamental requirements for system design, implementation, and operation to ensure safe human-robot collaboration while maintaining operational effectiveness.
The International Organization for Standardization (ISO) has developed comprehensive guidelines through ISO 10218 series for industrial robots and ISO 15066 specifically addressing collaborative robots. These standards define maximum allowable contact forces and pressures for different body regions, establishing biomechanical limits that robotic systems must respect during contact scenarios. The standards categorize contact types into transient and quasi-static interactions, each with distinct force thresholds and duration constraints.
Force control and impedance control systems must comply with different aspects of these safety requirements. Force control implementations typically require explicit force limiting mechanisms and emergency stop capabilities when predetermined thresholds are exceeded. The standards mandate that force-controlled systems incorporate redundant safety monitoring with response times typically under 500 milliseconds for contact detection and reaction.
Impedance control systems face unique compliance challenges due to their inherent contact behavior characteristics. Safety standards require these systems to demonstrate predictable and bounded contact forces under all operational conditions, including system failures or unexpected disturbances. The variable stiffness nature of impedance control necessitates comprehensive stability analysis across the entire operational parameter space to ensure compliance with force limitations.
Certification processes for contact control applications involve rigorous testing protocols including worst-case scenario analysis, failure mode evaluation, and long-term reliability assessment. Standards require documentation of stability margins, contact force boundaries, and system response characteristics under various loading conditions. Risk assessment methodologies must demonstrate that residual risks fall within acceptable levels defined by the application context and user exposure scenarios.
Emerging safety standards are evolving to address advanced control strategies and machine learning integration in contact control systems. These developments focus on maintaining safety guarantees while enabling more sophisticated interaction capabilities, requiring new approaches to verification and validation of adaptive control behaviors in contact scenarios.
The International Organization for Standardization (ISO) has developed comprehensive guidelines through ISO 10218 series for industrial robots and ISO 15066 specifically addressing collaborative robots. These standards define maximum allowable contact forces and pressures for different body regions, establishing biomechanical limits that robotic systems must respect during contact scenarios. The standards categorize contact types into transient and quasi-static interactions, each with distinct force thresholds and duration constraints.
Force control and impedance control systems must comply with different aspects of these safety requirements. Force control implementations typically require explicit force limiting mechanisms and emergency stop capabilities when predetermined thresholds are exceeded. The standards mandate that force-controlled systems incorporate redundant safety monitoring with response times typically under 500 milliseconds for contact detection and reaction.
Impedance control systems face unique compliance challenges due to their inherent contact behavior characteristics. Safety standards require these systems to demonstrate predictable and bounded contact forces under all operational conditions, including system failures or unexpected disturbances. The variable stiffness nature of impedance control necessitates comprehensive stability analysis across the entire operational parameter space to ensure compliance with force limitations.
Certification processes for contact control applications involve rigorous testing protocols including worst-case scenario analysis, failure mode evaluation, and long-term reliability assessment. Standards require documentation of stability margins, contact force boundaries, and system response characteristics under various loading conditions. Risk assessment methodologies must demonstrate that residual risks fall within acceptable levels defined by the application context and user exposure scenarios.
Emerging safety standards are evolving to address advanced control strategies and machine learning integration in contact control systems. These developments focus on maintaining safety guarantees while enabling more sophisticated interaction capabilities, requiring new approaches to verification and validation of adaptive control behaviors in contact scenarios.
Performance Metrics for Contact Control Evaluation
Evaluating the performance of force control and impedance control systems in contact scenarios requires a comprehensive set of metrics that capture both stability characteristics and operational effectiveness. The stability margin serves as a fundamental metric, quantifying how close a control system operates to its stability boundaries during contact interactions. This metric becomes particularly critical when comparing force control and impedance control approaches, as each exhibits distinct stability behaviors under varying contact conditions.
Stability margin assessment typically involves analyzing the system's robustness to parameter variations, environmental uncertainties, and contact dynamics. For force control systems, the stability margin is often evaluated through gain margins and phase margins in the frequency domain, considering the closed-loop dynamics between the force sensor feedback and actuator response. The metric reveals how much additional gain or phase delay the system can tolerate before becoming unstable during contact operations.
Impedance control systems require different stability evaluation approaches, focusing on the virtual impedance parameters and their interaction with environmental stiffness. The stability margin in this context relates to the range of environmental impedances that the system can accommodate while maintaining stable contact behavior. This includes analyzing the relationship between desired impedance parameters and the actual contact dynamics.
Contact force tracking accuracy represents another essential performance metric, measuring how precisely the control system maintains desired force profiles during interaction tasks. This metric directly impacts task quality and safety, particularly in applications requiring delicate manipulation or consistent contact pressure. The evaluation typically involves statistical analysis of force tracking errors under various contact conditions and disturbances.
Dynamic response characteristics provide insights into system performance during transient contact events, such as contact establishment, force transitions, and contact loss scenarios. Metrics include settling time, overshoot percentage, and steady-state error, which collectively determine the system's ability to handle dynamic contact situations effectively.
Robustness metrics evaluate system performance under parameter uncertainties, modeling errors, and external disturbances. These include sensitivity analysis to contact stiffness variations, payload changes, and sensor noise, providing quantitative measures of system reliability across diverse operating conditions.
Stability margin assessment typically involves analyzing the system's robustness to parameter variations, environmental uncertainties, and contact dynamics. For force control systems, the stability margin is often evaluated through gain margins and phase margins in the frequency domain, considering the closed-loop dynamics between the force sensor feedback and actuator response. The metric reveals how much additional gain or phase delay the system can tolerate before becoming unstable during contact operations.
Impedance control systems require different stability evaluation approaches, focusing on the virtual impedance parameters and their interaction with environmental stiffness. The stability margin in this context relates to the range of environmental impedances that the system can accommodate while maintaining stable contact behavior. This includes analyzing the relationship between desired impedance parameters and the actual contact dynamics.
Contact force tracking accuracy represents another essential performance metric, measuring how precisely the control system maintains desired force profiles during interaction tasks. This metric directly impacts task quality and safety, particularly in applications requiring delicate manipulation or consistent contact pressure. The evaluation typically involves statistical analysis of force tracking errors under various contact conditions and disturbances.
Dynamic response characteristics provide insights into system performance during transient contact events, such as contact establishment, force transitions, and contact loss scenarios. Metrics include settling time, overshoot percentage, and steady-state error, which collectively determine the system's ability to handle dynamic contact situations effectively.
Robustness metrics evaluate system performance under parameter uncertainties, modeling errors, and external disturbances. These include sensitivity analysis to contact stiffness variations, payload changes, and sensor noise, providing quantitative measures of system reliability across diverse operating conditions.
Unlock deeper insights with PatSnap Eureka Quick Research — get a full tech report to explore trends and direct your research. Try now!
Generate Your Research Report Instantly with AI Agent
Supercharge your innovation with PatSnap Eureka AI Agent Platform!