

Comparing Robotic End Effector Gripping Strength: Soft vs Hard Materials
MAY 25, 20269 MIN READ
Generate Your Research Report Instantly with AI Agent
PatSnap Eureka helps you evaluate technical feasibility & market potential.
Robotic End Effector Material Evolution and Objectives
The evolution of robotic end effector materials represents a fundamental shift in automation technology, driven by the increasing demand for versatile and adaptive robotic systems. Traditional hard material grippers, predominantly constructed from metals and rigid polymers, dominated early industrial applications where precision and durability were paramount. However, the emergence of soft robotics has introduced compliant materials such as silicones, elastomers, and bio-inspired polymers that offer unprecedented adaptability and safety in human-robot interaction scenarios.
The historical trajectory of end effector development began with simple mechanical claws and pneumatic grippers designed for repetitive manufacturing tasks. These systems prioritized gripping strength and positional accuracy over adaptability. The introduction of servo-controlled actuators in the 1980s enhanced precision but maintained the rigid material paradigm. The breakthrough came in the early 2000s with advances in soft robotics research, particularly inspired by biological systems that demonstrated how compliant materials could achieve remarkable manipulation capabilities through distributed compliance and adaptive conforming.
Contemporary material science has enabled the development of smart materials that blur the traditional boundaries between soft and hard classifications. Shape memory alloys, electroactive polymers, and variable stiffness materials now allow end effectors to dynamically adjust their mechanical properties based on task requirements. These hybrid approaches represent a convergence of the strength advantages of hard materials with the adaptability benefits of soft materials.
The primary objective driving current research focuses on optimizing the trade-off between gripping strength and adaptability. Hard materials excel in applications requiring high force transmission, precise positioning, and durability under repetitive stress. Conversely, soft materials demonstrate superior performance in handling delicate objects, conforming to irregular geometries, and providing inherent safety through compliance. The challenge lies in developing materials and control strategies that can selectively leverage these complementary characteristics.
Future material evolution aims to achieve programmable stiffness, enabling end effectors to transition between soft and hard states as needed. This technological convergence seeks to eliminate the current binary choice between material types, instead offering dynamic material properties that can be optimized in real-time based on specific gripping requirements and environmental constraints.
The historical trajectory of end effector development began with simple mechanical claws and pneumatic grippers designed for repetitive manufacturing tasks. These systems prioritized gripping strength and positional accuracy over adaptability. The introduction of servo-controlled actuators in the 1980s enhanced precision but maintained the rigid material paradigm. The breakthrough came in the early 2000s with advances in soft robotics research, particularly inspired by biological systems that demonstrated how compliant materials could achieve remarkable manipulation capabilities through distributed compliance and adaptive conforming.
Contemporary material science has enabled the development of smart materials that blur the traditional boundaries between soft and hard classifications. Shape memory alloys, electroactive polymers, and variable stiffness materials now allow end effectors to dynamically adjust their mechanical properties based on task requirements. These hybrid approaches represent a convergence of the strength advantages of hard materials with the adaptability benefits of soft materials.
The primary objective driving current research focuses on optimizing the trade-off between gripping strength and adaptability. Hard materials excel in applications requiring high force transmission, precise positioning, and durability under repetitive stress. Conversely, soft materials demonstrate superior performance in handling delicate objects, conforming to irregular geometries, and providing inherent safety through compliance. The challenge lies in developing materials and control strategies that can selectively leverage these complementary characteristics.
Future material evolution aims to achieve programmable stiffness, enabling end effectors to transition between soft and hard states as needed. This technological convergence seeks to eliminate the current binary choice between material types, instead offering dynamic material properties that can be optimized in real-time based on specific gripping requirements and environmental constraints.
Market Demand for Advanced Robotic Gripping Solutions
The global robotics market is experiencing unprecedented growth, driven by increasing automation demands across manufacturing, logistics, healthcare, and service industries. Advanced robotic gripping solutions represent a critical component of this expansion, as end effectors directly determine the versatility and effectiveness of robotic systems in handling diverse objects and materials.
Manufacturing sectors are increasingly seeking robotic solutions capable of handling delicate components without damage while maintaining sufficient grip strength for secure manipulation. The automotive industry requires grippers that can manage both rigid metal parts and flexible materials like rubber seals and plastic components. Electronics manufacturing demands precision handling of fragile semiconductors and circuit boards, where traditional hard grippers often prove inadequate.
Healthcare and pharmaceutical industries present substantial market opportunities for advanced gripping technologies. Surgical robots require end effectors that can provide gentle yet secure handling of biological tissues, while pharmaceutical packaging operations need systems capable of managing various container materials and shapes without contamination or damage.
The food and beverage sector drives demand for hygienic gripping solutions that can handle products of varying textures, from soft fruits to rigid packaging materials. Consumer expectations for product quality and safety necessitate gripping systems that minimize bruising and contamination while maintaining operational efficiency.
E-commerce and logistics operations fuel market growth through requirements for versatile picking and packing systems. Warehouses need robotic solutions capable of handling diverse product portfolios, from soft textiles to hard electronics, without requiring frequent end effector changes that reduce operational efficiency.
Emerging applications in agriculture, construction, and space exploration create additional market segments for specialized gripping technologies. These sectors require robust solutions capable of operating in challenging environments while maintaining precise control over grip strength and material compatibility.
Market research indicates strong preference for adaptive gripping systems that can automatically adjust grip parameters based on object characteristics. This trend reflects operational needs for reduced programming complexity and increased system flexibility across diverse applications.
Manufacturing sectors are increasingly seeking robotic solutions capable of handling delicate components without damage while maintaining sufficient grip strength for secure manipulation. The automotive industry requires grippers that can manage both rigid metal parts and flexible materials like rubber seals and plastic components. Electronics manufacturing demands precision handling of fragile semiconductors and circuit boards, where traditional hard grippers often prove inadequate.
Healthcare and pharmaceutical industries present substantial market opportunities for advanced gripping technologies. Surgical robots require end effectors that can provide gentle yet secure handling of biological tissues, while pharmaceutical packaging operations need systems capable of managing various container materials and shapes without contamination or damage.
The food and beverage sector drives demand for hygienic gripping solutions that can handle products of varying textures, from soft fruits to rigid packaging materials. Consumer expectations for product quality and safety necessitate gripping systems that minimize bruising and contamination while maintaining operational efficiency.
E-commerce and logistics operations fuel market growth through requirements for versatile picking and packing systems. Warehouses need robotic solutions capable of handling diverse product portfolios, from soft textiles to hard electronics, without requiring frequent end effector changes that reduce operational efficiency.
Emerging applications in agriculture, construction, and space exploration create additional market segments for specialized gripping technologies. These sectors require robust solutions capable of operating in challenging environments while maintaining precise control over grip strength and material compatibility.
Market research indicates strong preference for adaptive gripping systems that can automatically adjust grip parameters based on object characteristics. This trend reflects operational needs for reduced programming complexity and increased system flexibility across diverse applications.
Current State of Soft vs Hard End Effector Technologies
The current landscape of robotic end effector technologies presents a distinct dichotomy between soft and hard material approaches, each addressing different aspects of gripping strength and manipulation capabilities. Hard end effectors, predominantly constructed from metals, rigid plastics, and composite materials, have established themselves as the industry standard for high-force applications requiring precise positioning and substantial gripping strength.
Traditional hard grippers utilize mechanical linkages, pneumatic actuators, and servo-driven mechanisms to achieve gripping forces ranging from 50N to over 1000N depending on the application. These systems excel in manufacturing environments where consistent, repeatable force application is critical, such as automotive assembly lines and heavy machinery operations. The rigid structure enables precise force transmission and maintains dimensional stability under varying load conditions.
Soft end effector technologies have emerged as a complementary solution, leveraging flexible materials such as silicone elastomers, thermoplastic polyurethanes, and bio-inspired polymers. These systems typically generate lower absolute gripping forces, generally ranging from 5N to 200N, but compensate through adaptive conformability and distributed contact pressure. Soft grippers utilize pneumatic inflation, cable-driven actuation, or shape memory alloys to achieve controlled deformation and object engagement.
The technological maturity levels differ significantly between these approaches. Hard end effectors benefit from decades of industrial refinement, with established manufacturing processes, standardized interfaces, and proven reliability metrics. Commercial solutions from established manufacturers offer well-documented performance specifications and extensive field validation data.
Conversely, soft robotics represents a rapidly evolving field with significant research momentum but limited commercial penetration. Current soft gripper technologies face challenges in force measurement accuracy, durability under repeated cycling, and integration with existing robotic control systems. However, recent advances in material science, particularly in programmable matter and smart polymers, are addressing these limitations.
Hybrid approaches are gaining traction, combining rigid structural elements with soft contact surfaces to optimize both gripping strength and adaptability. These solutions attempt to bridge the performance gap by maintaining the force transmission capabilities of hard materials while incorporating the conformability benefits of soft interfaces.
The geographical distribution of technological development shows concentrated research activities in North America, Europe, and East Asia, with notable contributions from academic institutions and emerging robotics companies specializing in bio-inspired manipulation systems.
Traditional hard grippers utilize mechanical linkages, pneumatic actuators, and servo-driven mechanisms to achieve gripping forces ranging from 50N to over 1000N depending on the application. These systems excel in manufacturing environments where consistent, repeatable force application is critical, such as automotive assembly lines and heavy machinery operations. The rigid structure enables precise force transmission and maintains dimensional stability under varying load conditions.
Soft end effector technologies have emerged as a complementary solution, leveraging flexible materials such as silicone elastomers, thermoplastic polyurethanes, and bio-inspired polymers. These systems typically generate lower absolute gripping forces, generally ranging from 5N to 200N, but compensate through adaptive conformability and distributed contact pressure. Soft grippers utilize pneumatic inflation, cable-driven actuation, or shape memory alloys to achieve controlled deformation and object engagement.
The technological maturity levels differ significantly between these approaches. Hard end effectors benefit from decades of industrial refinement, with established manufacturing processes, standardized interfaces, and proven reliability metrics. Commercial solutions from established manufacturers offer well-documented performance specifications and extensive field validation data.
Conversely, soft robotics represents a rapidly evolving field with significant research momentum but limited commercial penetration. Current soft gripper technologies face challenges in force measurement accuracy, durability under repeated cycling, and integration with existing robotic control systems. However, recent advances in material science, particularly in programmable matter and smart polymers, are addressing these limitations.
Hybrid approaches are gaining traction, combining rigid structural elements with soft contact surfaces to optimize both gripping strength and adaptability. These solutions attempt to bridge the performance gap by maintaining the force transmission capabilities of hard materials while incorporating the conformability benefits of soft interfaces.
The geographical distribution of technological development shows concentrated research activities in North America, Europe, and East Asia, with notable contributions from academic institutions and emerging robotics companies specializing in bio-inspired manipulation systems.
Existing Soft and Hard Material Gripping Solutions
01 Adaptive gripping mechanisms and force control systems
Advanced gripping systems that can automatically adjust gripping force based on object characteristics and feedback sensors. These mechanisms incorporate force control algorithms and adaptive pressure regulation to optimize gripping strength for different materials and object sizes. The systems typically include pressure sensors, force feedback loops, and automated adjustment capabilities to prevent damage while ensuring secure grip.- Adaptive gripping mechanisms and force control systems: Advanced gripping systems that can automatically adjust gripping force based on object characteristics and feedback sensors. These mechanisms incorporate force control algorithms and adaptive pressure regulation to optimize grip strength for different materials and object sizes. The systems often include real-time monitoring and adjustment capabilities to prevent damage to delicate objects while ensuring secure handling of heavier items.
- Multi-finger articulated gripper designs: Sophisticated end effector configurations featuring multiple articulated fingers or digits that can conform to object shapes and distribute gripping forces. These designs enable enhanced manipulation capabilities and improved grip stability through coordinated finger movements and individual force control for each digit. The articulated structure allows for better adaptation to irregular object geometries.
- Pneumatic and hydraulic actuation systems: Power transmission systems utilizing compressed air or hydraulic fluid to generate and control gripping forces in robotic end effectors. These actuation methods provide high force-to-weight ratios and precise force modulation capabilities. The systems often incorporate pressure regulation valves and feedback mechanisms to maintain consistent gripping performance across varying operational conditions.
- Sensor integration for grip force feedback: Implementation of various sensing technologies including force sensors, tactile sensors, and pressure monitoring systems to provide real-time feedback on gripping conditions. These sensor systems enable closed-loop control of grip strength and help prevent slippage or excessive force application. The integration allows for intelligent grip adjustment based on object properties and environmental conditions.
- Specialized gripping surface materials and textures: Development of advanced surface materials and texturing techniques for gripper contact areas to enhance friction and grip effectiveness. These solutions include compliant materials, micro-textured surfaces, and adaptive contact elements that improve grip security without requiring excessive force. The materials are designed to provide optimal contact characteristics for various object types and surface conditions.
02 Multi-finger articulated gripping designs
Robotic end effectors featuring multiple articulated fingers or gripping elements that can distribute gripping forces across multiple contact points. These designs enhance gripping strength through coordinated finger movements and improved force distribution. The articulated mechanisms allow for better conformity to object shapes and increased overall gripping capability through synchronized multi-point contact.Expand Specific Solutions03 Pneumatic and hydraulic actuation systems
High-force actuation systems utilizing pneumatic or hydraulic power to generate substantial gripping forces. These systems provide consistent and controllable gripping strength through pressurized fluid mechanisms. The actuation systems can deliver high force-to-weight ratios and maintain steady gripping pressure over extended periods, making them suitable for heavy-duty applications requiring significant gripping strength.Expand Specific Solutions04 Surface texture and material optimization for grip enhancement
Specialized gripping surface materials and textures designed to maximize friction and contact area between the end effector and target objects. These enhancements include textured gripping pads, compliant materials, and surface treatments that increase coefficient of friction. The optimized surfaces provide better grip security and allow for higher gripping forces without slippage.Expand Specific Solutions05 Integrated sensing and feedback control for grip optimization
Comprehensive sensor integration systems that monitor gripping force, object slip, and contact pressure in real-time. These systems use various sensing technologies to provide continuous feedback for grip strength optimization. The integrated control systems can automatically adjust gripping parameters based on sensor data to maintain optimal gripping force while preventing object damage or grip failure.Expand Specific Solutions
Leading Companies in Robotic End Effector Manufacturing
The robotic end effector gripping technology sector is experiencing rapid evolution, transitioning from early-stage research to commercial deployment across diverse industrial applications. The market demonstrates substantial growth potential, driven by increasing automation demands in manufacturing, healthcare, and logistics sectors. Technology maturity varies significantly between soft and hard material approaches, with established players like Kawasaki Heavy Industries, Boeing, and Airbus Operations leading traditional rigid gripper development, while emerging companies such as Sanctuary Cognitive Systems and Oxipital AI pioneer advanced soft robotics solutions. Academic institutions including Northwestern University, Zhejiang University, and EPFL contribute foundational research in material science and control algorithms. The competitive landscape reveals a hybrid approach gaining traction, where companies like Sarcos Corp. and Boston Engineering integrate both soft and hard material technologies to optimize gripping performance across varied applications, indicating market maturation toward versatile, adaptive end effector solutions.
Sarcos Corp.
Technical Solution: Sarcos develops advanced robotic systems with sophisticated end effectors that utilize both soft and hard gripping technologies. Their Guardian series robots feature adaptive gripping mechanisms that can dynamically adjust grip strength based on object properties. The company's proprietary force feedback systems enable precise control of gripping force, allowing for delicate manipulation tasks while maintaining the capability for high-strength applications. Their end effectors incorporate pressure sensors and compliant materials that can conform to irregular surfaces while providing up to 200N of gripping force when needed.
Strengths: Advanced force feedback control, adaptive gripping technology, high payload capacity. Weaknesses: High cost, complex maintenance requirements, limited battery life for mobile applications.
Xyz Robotics Global, Inc.
Technical Solution: XYZ Robotics specializes in AI-powered robotic systems with intelligent end effectors that automatically select optimal gripping strategies. Their technology combines computer vision with adaptive gripping mechanisms featuring both soft silicone pads and rigid mechanical fingers. The system can analyze object properties in real-time and adjust grip configuration, applying forces ranging from 1N for delicate items to 300N for heavy objects. Their proprietary algorithms optimize grip strength based on object material, weight, and fragility, utilizing machine learning to improve performance over time.
Strengths: AI-driven adaptive control, excellent object recognition, continuous learning capability. Weaknesses: Dependence on computational resources, potential failure in novel scenarios, requires extensive training data.
Core Patents in Adaptive Gripping Strength Technologies
Soft robotic gripper with hybrid structure and grasping reliability
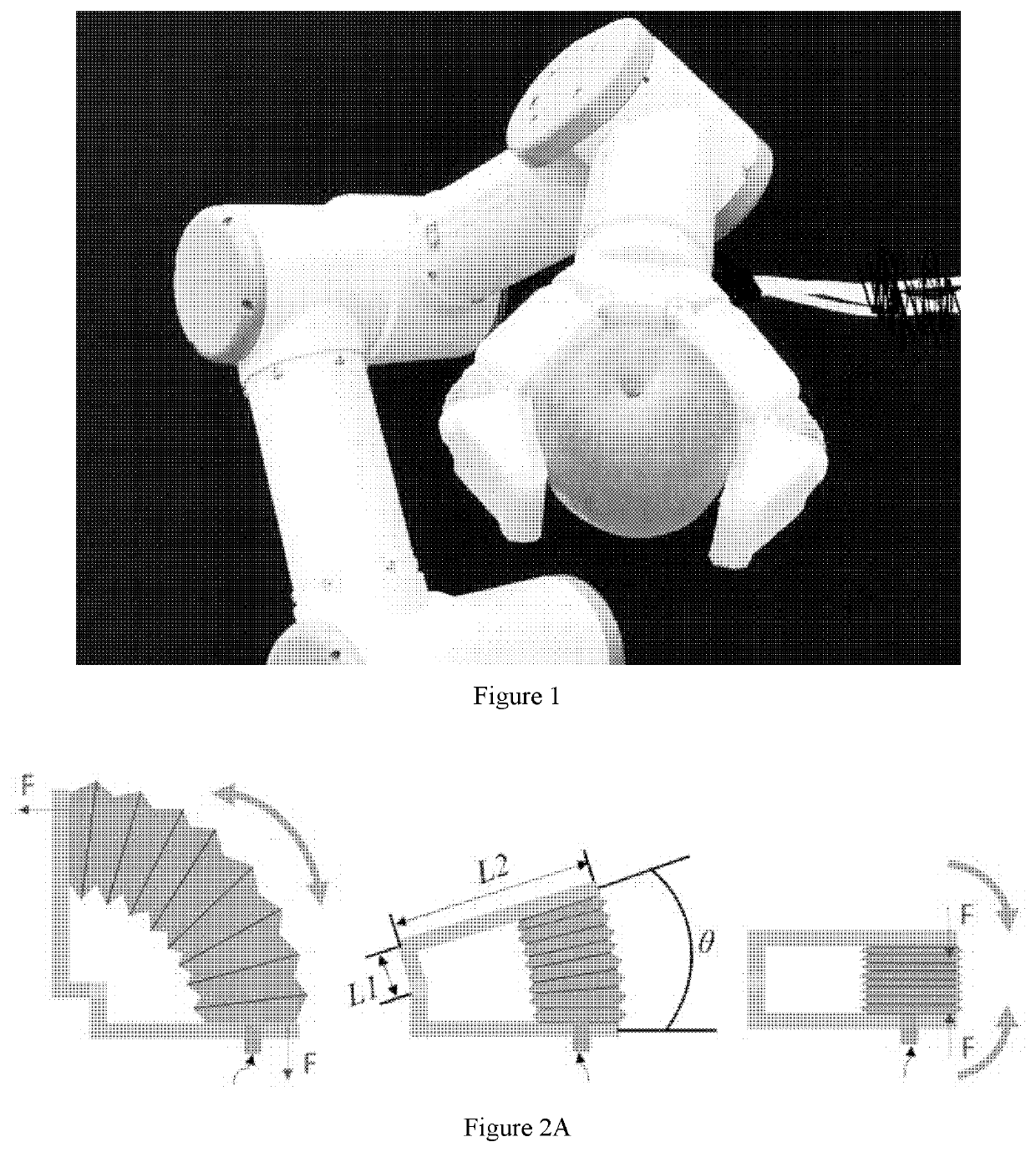
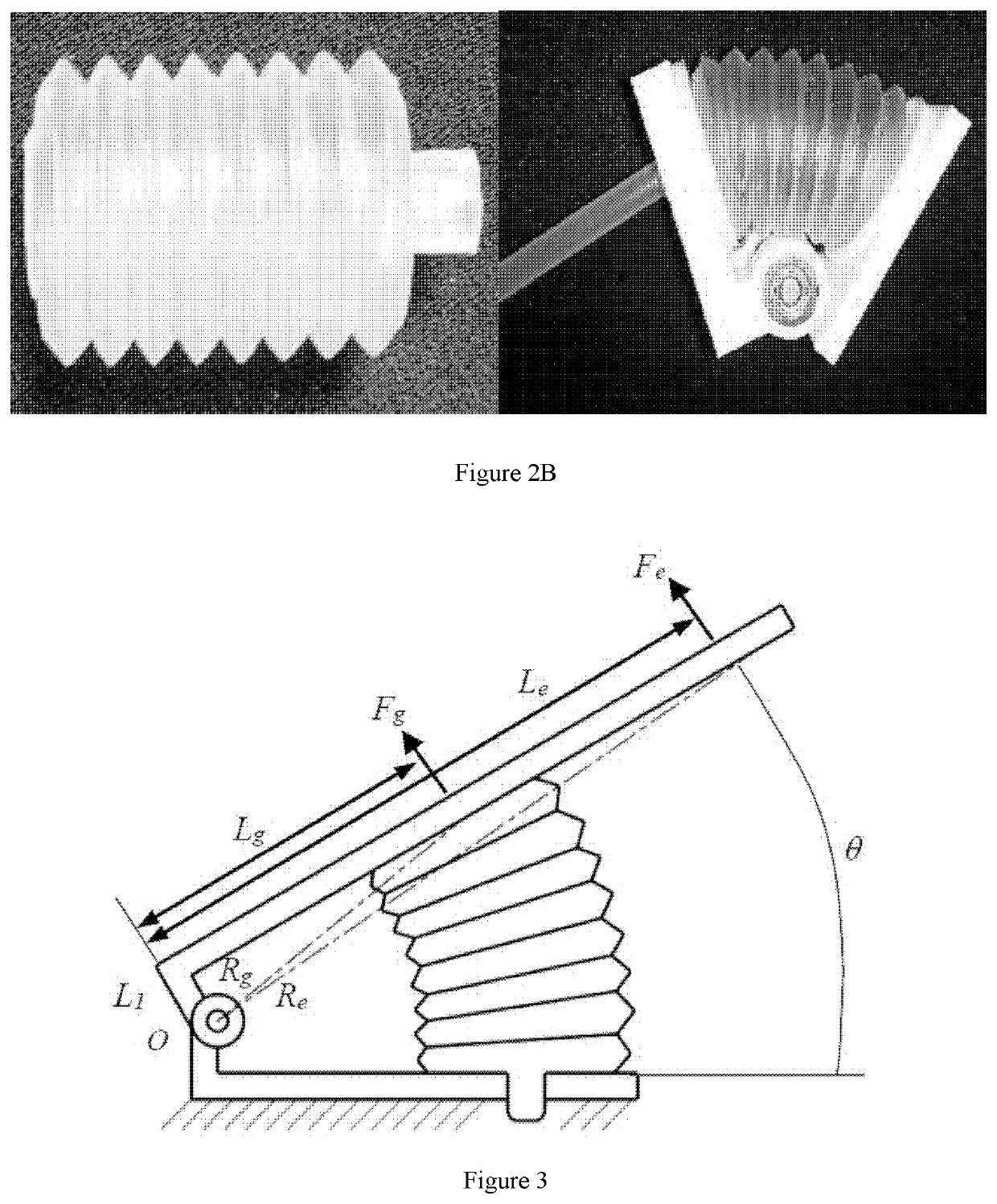
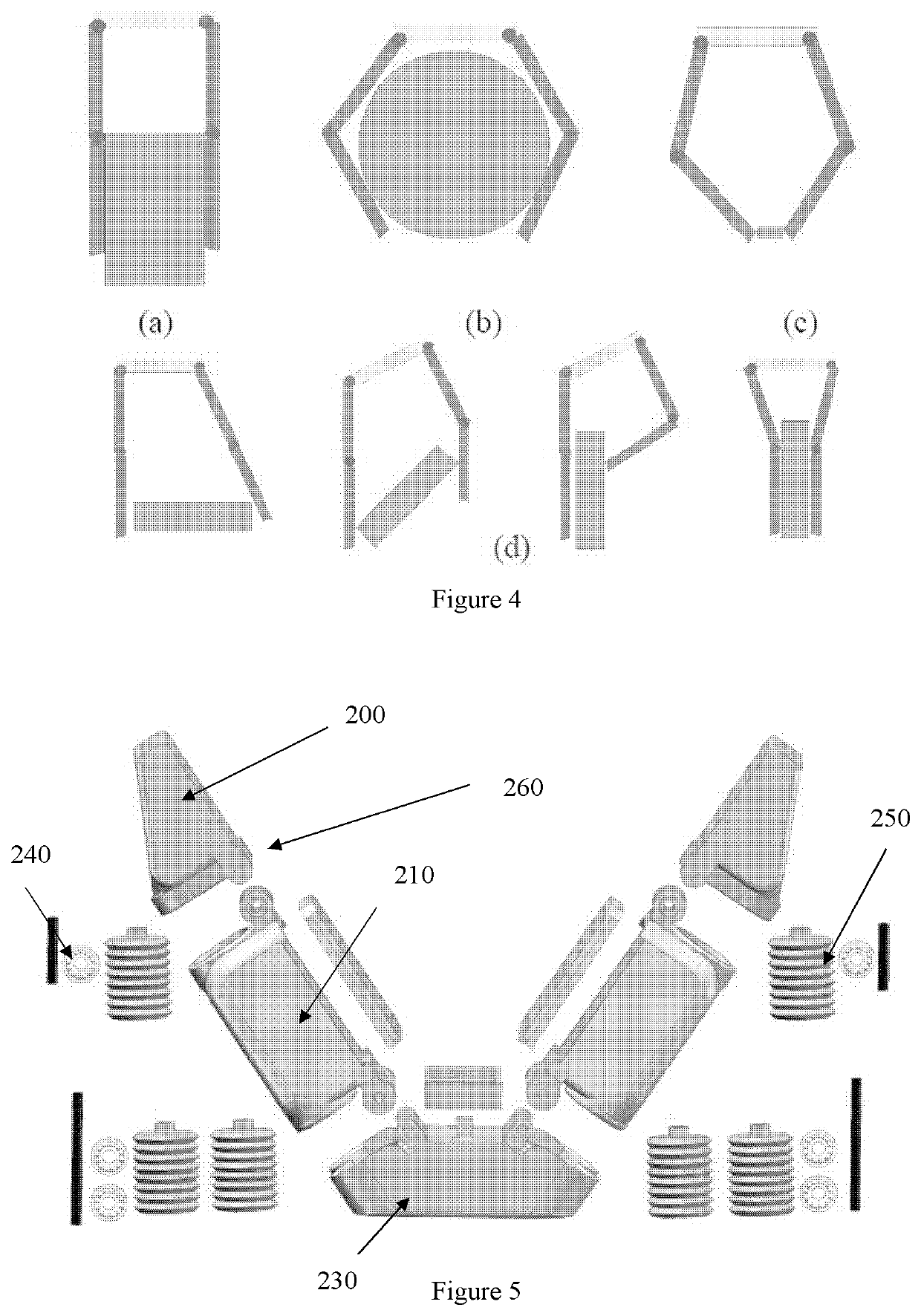
PatentActiveUS20200298420A1
Innovation
- A hybrid actuation mechanism combining linear soft actuators with rigid joints and independent joint control, allowing for programmable grasping modes such as envelope, parallel, and fully actuated grasping, while maintaining compliance and providing robust structure rigidity through the use of pneumatic bellows with adjustable stiffness.

Patent
Innovation
- Adaptive gripping force control system that automatically adjusts pressure based on material hardness detection to prevent damage to soft materials while ensuring secure grip on hard materials.
- Multi-modal end effector design combining both rigid and compliant gripping elements that can selectively engage based on target material characteristics.
- Force feedback optimization algorithm that learns and predicts optimal gripping parameters for different material types through machine learning approaches.
Safety Standards for Industrial Robotic Grippers
Industrial robotic grippers operating in manufacturing environments must comply with comprehensive safety standards that address both operational risks and material-specific considerations. The International Organization for Standardization (ISO) 10218 series establishes fundamental safety requirements for industrial robots, while ISO 13849 provides guidelines for safety-related control systems. These standards mandate risk assessment protocols that evaluate potential hazards associated with different gripper materials and their interaction with workpieces.
The American National Standards Institute (ANSI) RIA R15.06 standard specifically addresses robotic system safety, requiring that end effectors undergo rigorous testing for grip force consistency and failure mode analysis. This becomes particularly critical when comparing soft versus hard gripper materials, as each presents distinct safety profiles. Hard grippers may pose crushing hazards due to concentrated force application, while soft grippers require evaluation for material degradation and contamination risks.
European machinery directive EN ISO 12100 emphasizes the importance of inherent safe design principles for robotic grippers. Safety standards require that grip force monitoring systems be implemented to prevent excessive clamping forces that could damage workpieces or create projectile hazards. For soft material grippers, standards mandate regular inspection protocols to detect wear patterns, material fatigue, and potential particle shedding that could contaminate production environments.
Collaborative robot applications introduce additional safety considerations under ISO 10218-1 and ISO/TS 15066 standards. These regulations establish maximum allowable contact forces and pressures for human-robot interaction scenarios. Soft gripper materials often demonstrate superior compliance with these force limitations, while hard grippers may require additional safety measures such as force limiting devices or enhanced sensing capabilities.
Certification processes require comprehensive documentation of gripper performance across various operational parameters, including temperature ranges, chemical exposure, and cyclic loading conditions. Safety standards also mandate emergency stop functionality and fail-safe mechanisms that ensure grippers release workpieces safely during system failures, regardless of material composition.
The American National Standards Institute (ANSI) RIA R15.06 standard specifically addresses robotic system safety, requiring that end effectors undergo rigorous testing for grip force consistency and failure mode analysis. This becomes particularly critical when comparing soft versus hard gripper materials, as each presents distinct safety profiles. Hard grippers may pose crushing hazards due to concentrated force application, while soft grippers require evaluation for material degradation and contamination risks.
European machinery directive EN ISO 12100 emphasizes the importance of inherent safe design principles for robotic grippers. Safety standards require that grip force monitoring systems be implemented to prevent excessive clamping forces that could damage workpieces or create projectile hazards. For soft material grippers, standards mandate regular inspection protocols to detect wear patterns, material fatigue, and potential particle shedding that could contaminate production environments.
Collaborative robot applications introduce additional safety considerations under ISO 10218-1 and ISO/TS 15066 standards. These regulations establish maximum allowable contact forces and pressures for human-robot interaction scenarios. Soft gripper materials often demonstrate superior compliance with these force limitations, while hard grippers may require additional safety measures such as force limiting devices or enhanced sensing capabilities.
Certification processes require comprehensive documentation of gripper performance across various operational parameters, including temperature ranges, chemical exposure, and cyclic loading conditions. Safety standards also mandate emergency stop functionality and fail-safe mechanisms that ensure grippers release workpieces safely during system failures, regardless of material composition.
Performance Metrics for Gripping Strength Evaluation
Establishing comprehensive performance metrics for evaluating gripping strength in robotic end effectors requires a multifaceted approach that accounts for the fundamental differences between soft and hard material implementations. The evaluation framework must encompass both quantitative measurements and qualitative assessments to provide meaningful comparisons across different gripper technologies.
Maximum gripping force represents the primary quantitative metric, typically measured in Newtons or pounds-force. This metric determines the absolute holding capacity of the end effector when grasping objects of varying weights and geometries. For hard material grippers, this measurement is relatively straightforward, involving direct force transducers positioned at contact points. Soft material grippers require more sophisticated measurement approaches due to their distributed contact nature and potential for deformation during force application.
Grip stability metrics evaluate the consistency of holding force over time and under dynamic conditions. This includes measuring force decay rates, slip detection sensitivity, and maintaining grip integrity during acceleration and deceleration phases. Soft grippers often demonstrate superior performance in this category due to their inherent compliance and larger contact surface areas, which distribute forces more evenly across grasped objects.
Contact pressure distribution analysis provides critical insights into how gripping forces are transmitted to target objects. Advanced pressure mapping systems can quantify contact area, peak pressure points, and force uniformity. This metric is particularly important when handling delicate or irregularly shaped objects, where excessive localized pressure could cause damage or inadequate distributed pressure could result in grip failure.
Adaptability coefficients measure the gripper's ability to conform to objects of different shapes, sizes, and surface textures. This metric combines geometric accommodation range with force adjustment capabilities. Evaluation protocols typically involve standardized test objects with varying compliance levels, surface roughness parameters, and geometric complexity to establish comprehensive adaptability profiles for different gripper designs.
Response time and dynamic performance metrics assess how quickly grippers can achieve target gripping forces and adapt to changing load conditions. These measurements include initial contact detection speed, force ramp-up rates, and real-time grip adjustment capabilities when external forces are applied to grasped objects.
Maximum gripping force represents the primary quantitative metric, typically measured in Newtons or pounds-force. This metric determines the absolute holding capacity of the end effector when grasping objects of varying weights and geometries. For hard material grippers, this measurement is relatively straightforward, involving direct force transducers positioned at contact points. Soft material grippers require more sophisticated measurement approaches due to their distributed contact nature and potential for deformation during force application.
Grip stability metrics evaluate the consistency of holding force over time and under dynamic conditions. This includes measuring force decay rates, slip detection sensitivity, and maintaining grip integrity during acceleration and deceleration phases. Soft grippers often demonstrate superior performance in this category due to their inherent compliance and larger contact surface areas, which distribute forces more evenly across grasped objects.
Contact pressure distribution analysis provides critical insights into how gripping forces are transmitted to target objects. Advanced pressure mapping systems can quantify contact area, peak pressure points, and force uniformity. This metric is particularly important when handling delicate or irregularly shaped objects, where excessive localized pressure could cause damage or inadequate distributed pressure could result in grip failure.
Adaptability coefficients measure the gripper's ability to conform to objects of different shapes, sizes, and surface textures. This metric combines geometric accommodation range with force adjustment capabilities. Evaluation protocols typically involve standardized test objects with varying compliance levels, surface roughness parameters, and geometric complexity to establish comprehensive adaptability profiles for different gripper designs.
Response time and dynamic performance metrics assess how quickly grippers can achieve target gripping forces and adapt to changing load conditions. These measurements include initial contact detection speed, force ramp-up rates, and real-time grip adjustment capabilities when external forces are applied to grasped objects.
Unlock deeper insights with PatSnap Eureka Quick Research — get a full tech report to explore trends and direct your research. Try now!
Generate Your Research Report Instantly with AI Agent
Supercharge your innovation with PatSnap Eureka AI Agent Platform!