

Haptic Teleoperation Vs Physical Prototyping: Cost Efficiency
APR 20, 20269 MIN READ
Generate Your Research Report Instantly with AI Agent
Patsnap Eureka helps you evaluate technical feasibility & market potential.
Haptic Teleoperation vs Physical Prototyping Background and Objectives
The evolution of product development methodologies has been fundamentally shaped by the tension between physical and virtual prototyping approaches. Traditional physical prototyping has dominated manufacturing industries for decades, requiring substantial investments in materials, tooling, and iterative fabrication processes. However, the emergence of haptic teleoperation technologies has introduced a paradigm shift, enabling engineers and designers to interact with virtual prototypes through tactile feedback systems that simulate real-world physical properties.
Haptic teleoperation represents a convergence of advanced robotics, force feedback systems, and virtual reality technologies. This approach allows users to manipulate virtual objects with realistic tactile sensations, effectively bridging the gap between digital design and physical interaction. The technology has evolved from rudimentary force feedback devices to sophisticated multi-degree-of-freedom systems capable of rendering complex material properties, surface textures, and dynamic behaviors.
The cost efficiency debate between these methodologies has intensified as organizations seek to optimize their development processes while maintaining product quality and innovation standards. Physical prototyping traditionally involves significant material costs, manufacturing time, and storage requirements, with each design iteration necessitating new physical artifacts. Conversely, haptic teleoperation systems require substantial upfront investments in specialized hardware and software but offer the potential for unlimited virtual iterations without additional material costs.
The primary objective of this technological comparison is to establish a comprehensive framework for evaluating the total cost of ownership across different product development scenarios. This includes analyzing direct costs such as equipment procurement, materials, and labor, as well as indirect factors including development cycle time, design flexibility, and market responsiveness. The analysis aims to identify optimal application domains for each approach and determine threshold conditions where one methodology becomes more cost-effective than the other.
Furthermore, this evaluation seeks to understand how emerging trends in haptic technology, including improved force resolution, wireless connectivity, and cloud-based simulation platforms, are reshaping the economic landscape of product development. The objective extends beyond simple cost comparison to encompass strategic considerations such as intellectual property protection, remote collaboration capabilities, and scalability across global development teams.
Haptic teleoperation represents a convergence of advanced robotics, force feedback systems, and virtual reality technologies. This approach allows users to manipulate virtual objects with realistic tactile sensations, effectively bridging the gap between digital design and physical interaction. The technology has evolved from rudimentary force feedback devices to sophisticated multi-degree-of-freedom systems capable of rendering complex material properties, surface textures, and dynamic behaviors.
The cost efficiency debate between these methodologies has intensified as organizations seek to optimize their development processes while maintaining product quality and innovation standards. Physical prototyping traditionally involves significant material costs, manufacturing time, and storage requirements, with each design iteration necessitating new physical artifacts. Conversely, haptic teleoperation systems require substantial upfront investments in specialized hardware and software but offer the potential for unlimited virtual iterations without additional material costs.
The primary objective of this technological comparison is to establish a comprehensive framework for evaluating the total cost of ownership across different product development scenarios. This includes analyzing direct costs such as equipment procurement, materials, and labor, as well as indirect factors including development cycle time, design flexibility, and market responsiveness. The analysis aims to identify optimal application domains for each approach and determine threshold conditions where one methodology becomes more cost-effective than the other.
Furthermore, this evaluation seeks to understand how emerging trends in haptic technology, including improved force resolution, wireless connectivity, and cloud-based simulation platforms, are reshaping the economic landscape of product development. The objective extends beyond simple cost comparison to encompass strategic considerations such as intellectual property protection, remote collaboration capabilities, and scalability across global development teams.
Market Demand for Cost-Effective Prototyping Solutions
The global prototyping market is experiencing unprecedented demand for cost-effective solutions as companies across industries face mounting pressure to accelerate product development cycles while controlling expenses. Traditional physical prototyping methods, which have dominated the industry for decades, are increasingly viewed as resource-intensive and time-consuming, particularly in sectors requiring multiple design iterations.
Manufacturing industries, including automotive, aerospace, and consumer electronics, represent the largest segment driving demand for efficient prototyping alternatives. These sectors traditionally rely heavily on physical mockups and testing procedures that consume substantial material resources and require extensive manufacturing setup times. The automotive industry alone has shown significant interest in virtual prototyping technologies that can reduce the need for multiple physical test vehicles during development phases.
Medical device development presents another critical market segment where cost-effective prototyping solutions are essential. Regulatory requirements in this sector demand extensive testing and validation, making traditional prototyping approaches particularly expensive. The ability to conduct preliminary testing and design validation through haptic teleoperation systems offers substantial cost savings potential while maintaining necessary precision and safety standards.
Small and medium-sized enterprises constitute an emerging market segment with particularly acute cost sensitivity. These organizations often lack the capital resources for extensive physical prototyping infrastructure but require sophisticated design validation capabilities to compete effectively. The democratization of advanced prototyping technologies through more affordable haptic teleoperation solutions addresses this significant market gap.
The rise of remote work paradigms has further amplified demand for virtual prototyping capabilities. Companies seek solutions that enable distributed design teams to collaborate effectively without requiring physical presence at prototyping facilities. This trend has accelerated adoption of haptic teleoperation systems that allow remote manipulation and testing of virtual prototypes.
Market research indicates growing recognition among procurement departments and engineering managers that initial technology investments in haptic teleoperation systems can yield substantial long-term cost reductions. The ability to conduct multiple design iterations without material costs, combined with reduced time-to-market pressures, creates compelling value propositions for organizations evaluating prototyping strategy alternatives.
Manufacturing industries, including automotive, aerospace, and consumer electronics, represent the largest segment driving demand for efficient prototyping alternatives. These sectors traditionally rely heavily on physical mockups and testing procedures that consume substantial material resources and require extensive manufacturing setup times. The automotive industry alone has shown significant interest in virtual prototyping technologies that can reduce the need for multiple physical test vehicles during development phases.
Medical device development presents another critical market segment where cost-effective prototyping solutions are essential. Regulatory requirements in this sector demand extensive testing and validation, making traditional prototyping approaches particularly expensive. The ability to conduct preliminary testing and design validation through haptic teleoperation systems offers substantial cost savings potential while maintaining necessary precision and safety standards.
Small and medium-sized enterprises constitute an emerging market segment with particularly acute cost sensitivity. These organizations often lack the capital resources for extensive physical prototyping infrastructure but require sophisticated design validation capabilities to compete effectively. The democratization of advanced prototyping technologies through more affordable haptic teleoperation solutions addresses this significant market gap.
The rise of remote work paradigms has further amplified demand for virtual prototyping capabilities. Companies seek solutions that enable distributed design teams to collaborate effectively without requiring physical presence at prototyping facilities. This trend has accelerated adoption of haptic teleoperation systems that allow remote manipulation and testing of virtual prototypes.
Market research indicates growing recognition among procurement departments and engineering managers that initial technology investments in haptic teleoperation systems can yield substantial long-term cost reductions. The ability to conduct multiple design iterations without material costs, combined with reduced time-to-market pressures, creates compelling value propositions for organizations evaluating prototyping strategy alternatives.
Current State and Cost Challenges in Prototyping Methods
Traditional physical prototyping remains the dominant approach in product development across industries, characterized by iterative cycles of design, fabrication, testing, and refinement. This conventional methodology involves creating tangible prototypes using various materials and manufacturing processes, from rapid prototyping techniques like 3D printing to sophisticated machining operations. While this approach provides authentic tactile feedback and real-world validation, it presents significant cost and time challenges that have intensified with increasing product complexity and shortened development cycles.
The financial burden of physical prototyping stems from multiple cost centers that compound throughout the development process. Material costs represent a substantial portion, particularly when working with specialized or high-grade materials required for functional testing. Manufacturing expenses include tooling, machining time, and skilled labor, which can escalate rapidly when multiple iterations are necessary. Additionally, the time-to-market pressure creates indirect costs through extended development cycles, delayed product launches, and increased resource allocation.
Current physical prototyping workflows face scalability challenges when dealing with complex systems or hazardous environments. Testing scenarios involving extreme conditions, dangerous materials, or expensive equipment often require specialized facilities and safety protocols, further inflating costs. The iterative nature of design refinement means that each physical modification requires new material procurement, fabrication time, and testing resources, creating a multiplicative cost effect that can strain project budgets.
Haptic teleoperation technology has emerged as a compelling alternative, offering virtual prototyping capabilities with force feedback simulation. This approach enables designers and engineers to interact with digital prototypes through haptic interfaces, providing tactile sensations that approximate real-world material properties and mechanical behaviors. Advanced haptic systems can simulate texture, stiffness, weight, and dynamic responses, allowing for comprehensive evaluation without physical material consumption.
The cost structure of haptic teleoperation differs fundamentally from traditional methods, shifting from material and manufacturing expenses to software licensing, hardware acquisition, and system maintenance. While initial setup costs can be substantial, the marginal cost of additional iterations approaches zero, as digital modifications require only computational resources rather than physical materials. This economic model becomes increasingly attractive for projects requiring extensive design exploration or frequent modifications.
However, haptic technology faces limitations in replicating certain physical phenomena, particularly complex material behaviors, thermal properties, and long-term durability characteristics. The fidelity gap between virtual and physical experiences remains a critical consideration, especially for applications where precise tactile feedback is essential for product validation. Integration challenges with existing design workflows and the learning curve associated with new haptic interfaces also present adoption barriers that organizations must evaluate against potential cost savings.
The financial burden of physical prototyping stems from multiple cost centers that compound throughout the development process. Material costs represent a substantial portion, particularly when working with specialized or high-grade materials required for functional testing. Manufacturing expenses include tooling, machining time, and skilled labor, which can escalate rapidly when multiple iterations are necessary. Additionally, the time-to-market pressure creates indirect costs through extended development cycles, delayed product launches, and increased resource allocation.
Current physical prototyping workflows face scalability challenges when dealing with complex systems or hazardous environments. Testing scenarios involving extreme conditions, dangerous materials, or expensive equipment often require specialized facilities and safety protocols, further inflating costs. The iterative nature of design refinement means that each physical modification requires new material procurement, fabrication time, and testing resources, creating a multiplicative cost effect that can strain project budgets.
Haptic teleoperation technology has emerged as a compelling alternative, offering virtual prototyping capabilities with force feedback simulation. This approach enables designers and engineers to interact with digital prototypes through haptic interfaces, providing tactile sensations that approximate real-world material properties and mechanical behaviors. Advanced haptic systems can simulate texture, stiffness, weight, and dynamic responses, allowing for comprehensive evaluation without physical material consumption.
The cost structure of haptic teleoperation differs fundamentally from traditional methods, shifting from material and manufacturing expenses to software licensing, hardware acquisition, and system maintenance. While initial setup costs can be substantial, the marginal cost of additional iterations approaches zero, as digital modifications require only computational resources rather than physical materials. This economic model becomes increasingly attractive for projects requiring extensive design exploration or frequent modifications.
However, haptic technology faces limitations in replicating certain physical phenomena, particularly complex material behaviors, thermal properties, and long-term durability characteristics. The fidelity gap between virtual and physical experiences remains a critical consideration, especially for applications where precise tactile feedback is essential for product validation. Integration challenges with existing design workflows and the learning curve associated with new haptic interfaces also present adoption barriers that organizations must evaluate against potential cost savings.
Existing Cost-Efficiency Solutions in Prototyping
01 Virtual reality and haptic feedback systems for remote operation
Implementation of virtual reality environments combined with haptic feedback mechanisms enables operators to remotely control systems with tactile sensation. These systems provide force feedback and touch sensations that simulate physical interaction, reducing the need for physical presence and multiple prototype iterations. The technology allows for realistic manipulation of virtual objects while receiving sensory feedback, improving operational precision and reducing training costs associated with physical prototyping.- Virtual reality and haptic feedback systems for remote operation: Implementation of virtual reality environments combined with haptic feedback mechanisms enables operators to remotely control systems with tactile sensation. These systems provide force feedback and touch sensations that simulate physical interaction, reducing the need for physical presence and multiple prototype iterations. The technology allows for realistic manipulation and control of remote devices while providing sensory information to the operator, thereby improving cost efficiency in development and operation phases.
- Digital twin and simulation-based prototyping: Digital twin technology creates virtual replicas of physical systems that can be tested and modified in simulation environments before physical prototyping. This approach significantly reduces the number of physical prototypes required by allowing comprehensive testing and validation in virtual space. The simulation-based methodology enables rapid iteration and design optimization without the material and manufacturing costs associated with traditional prototyping methods.
- Modular and reconfigurable haptic interface systems: Modular haptic interface designs allow for flexible configuration and reuse of components across different applications and projects. These systems feature interchangeable modules that can be adapted to various teleoperation scenarios without requiring complete system replacement. The reconfigurable nature reduces overall investment costs by enabling a single platform to serve multiple purposes and extending the useful life of hardware components through adaptability.
- Rapid prototyping integration with teleoperation systems: Integration of rapid prototyping technologies such as additive manufacturing with teleoperation systems enables quick fabrication and testing of physical components. This combination allows operators to remotely design, manufacture, and evaluate prototype parts in accelerated development cycles. The approach minimizes time-to-market and reduces costs associated with traditional manufacturing setup and tooling requirements while maintaining design flexibility.
- Cloud-based collaborative teleoperation platforms: Cloud-based platforms enable multiple users to collaborate on teleoperation and prototyping tasks from distributed locations, sharing resources and reducing infrastructure costs. These systems provide centralized computing power and data storage that eliminate the need for expensive local hardware installations. The collaborative environment allows for shared access to haptic devices and simulation tools, optimizing resource utilization and reducing per-project costs through economies of scale.
02 Digital twin and simulation-based prototyping
Creation of digital replicas of physical systems allows for virtual testing and validation before physical manufacturing. This approach enables comprehensive simulation of product behavior, performance testing, and design iteration in a virtual environment. By conducting extensive testing and modifications digitally, organizations can significantly reduce the number of physical prototypes required, thereby lowering material costs, manufacturing expenses, and development time.Expand Specific Solutions03 Teleoperation systems with reduced latency and bandwidth optimization
Advanced teleoperation architectures that minimize communication delays and optimize data transmission enable more efficient remote control operations. These systems employ compression algorithms, predictive control methods, and adaptive communication protocols to maintain responsive haptic feedback even over limited bandwidth connections. The efficiency improvements reduce infrastructure costs and enable deployment in resource-constrained environments without requiring expensive high-bandwidth networks.Expand Specific Solutions04 Modular and reconfigurable prototyping platforms
Development of flexible prototyping systems that can be reconfigured for multiple applications reduces the need for creating separate prototypes for each design variation. These platforms utilize interchangeable components, adjustable parameters, and adaptable interfaces that can be modified to test different configurations. This modularity allows a single physical platform to serve multiple prototyping purposes, significantly reducing hardware costs and accelerating the development cycle.Expand Specific Solutions05 Additive manufacturing integration with haptic design tools
Integration of haptic design interfaces with rapid prototyping technologies such as 3D printing enables designers to create and modify virtual models with tactile feedback before committing to physical production. This combination allows for intuitive design manipulation with immediate sensory response, followed by on-demand manufacturing of only validated designs. The approach eliminates wasteful prototype iterations and reduces material consumption by ensuring designs are thoroughly refined in the virtual stage before physical fabrication.Expand Specific Solutions
Key Players in Haptic Systems and Prototyping Industry
The haptic teleoperation versus physical prototyping cost efficiency landscape represents an emerging market transitioning from early adoption to growth phase, with significant potential driven by increasing demand for remote operation capabilities and cost reduction pressures. The market demonstrates substantial growth opportunities as industries seek alternatives to expensive physical prototyping cycles. Technology maturity varies significantly across players, with established medical robotics companies like Intuitive Surgical Operations and MAKO Surgical leading in proven haptic applications, while specialized firms like Exonetik and DistalMotion SA advance next-generation haptic actuators and surgical robotics. Research institutions including Carnegie Mellon University, Johns Hopkins University, and EPFL drive fundamental haptic technology development, while industrial giants like Boeing, Siemens Healthineers, and KUKA Deutschland integrate haptic solutions into broader automation ecosystems, creating a diverse competitive environment spanning from specialized startups to established multinational corporations.
Intuitive Surgical Operations, Inc.
Technical Solution: Intuitive Surgical has developed advanced haptic teleoperation systems for their da Vinci surgical robots, enabling surgeons to perform minimally invasive procedures with enhanced tactile feedback. Their approach focuses on cost-efficient haptic technology that reduces the need for extensive physical prototyping by providing realistic force feedback and tactile sensations during virtual training and procedure planning. The company's haptic systems integrate sophisticated sensors and actuators that simulate tissue interaction, allowing surgeons to practice complex procedures without requiring physical models or cadaveric training materials, significantly reducing training costs and improving surgical outcomes.
Strengths: Market-leading position in surgical robotics with proven haptic technology integration, extensive clinical validation, and established cost-reduction benefits. Weaknesses: High initial system costs and limited applicability outside surgical domain.
Carnegie Mellon University
Technical Solution: Carnegie Mellon University has pioneered research in haptic teleoperation systems that demonstrate superior cost efficiency compared to traditional physical prototyping methods. Their research focuses on developing high-fidelity haptic interfaces that can replicate complex material properties and interactions in virtual environments. The university's approach emphasizes reducing development costs by enabling rapid iteration and testing of designs through haptic simulation rather than building multiple physical prototypes. Their systems incorporate advanced force feedback algorithms and multi-modal sensory integration to provide realistic tactile experiences for applications ranging from manufacturing to medical training.
Strengths: Leading research institution with cutting-edge haptic technology development and strong academic-industry partnerships. Weaknesses: Research-focused approach may lack immediate commercial scalability and market-ready solutions.
Core Innovations in Haptic Teleoperation Cost Reduction
Haptic system for robot teleoperation in confined spaces
PatentActiveUS12397442B2
Innovation
- A haptic feedback system using an upper-body haptic suit with vibrating modules on the front and back to provide tactile feedback corresponding to the robot's position and orientation, enhancing spatial awareness and navigation through vibrotactile cues.




Systems and Methods for Haptics-Enabled Teleoperation of Vehicles and Other Devices
PatentActiveUS20080103639A1
Innovation
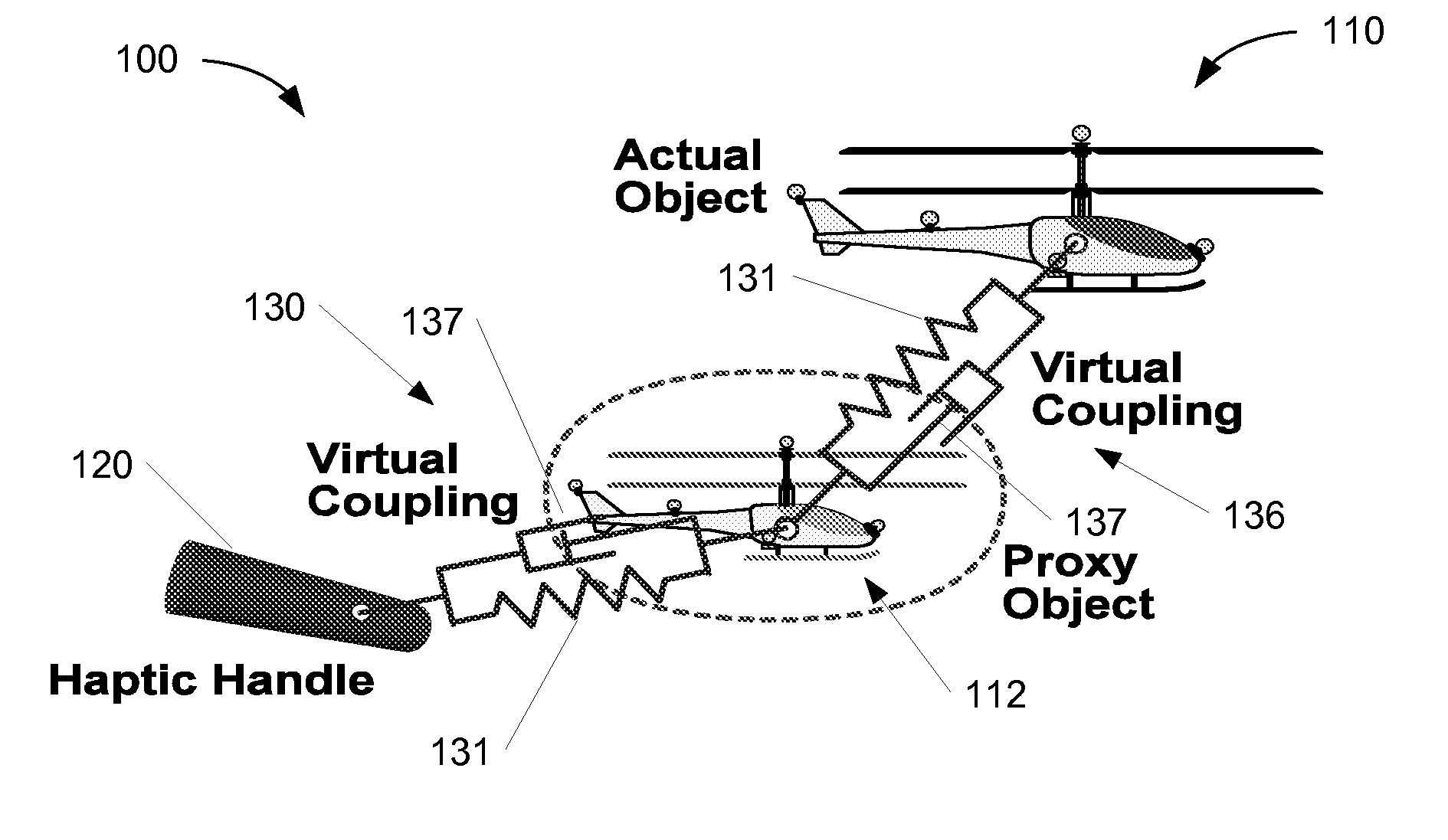
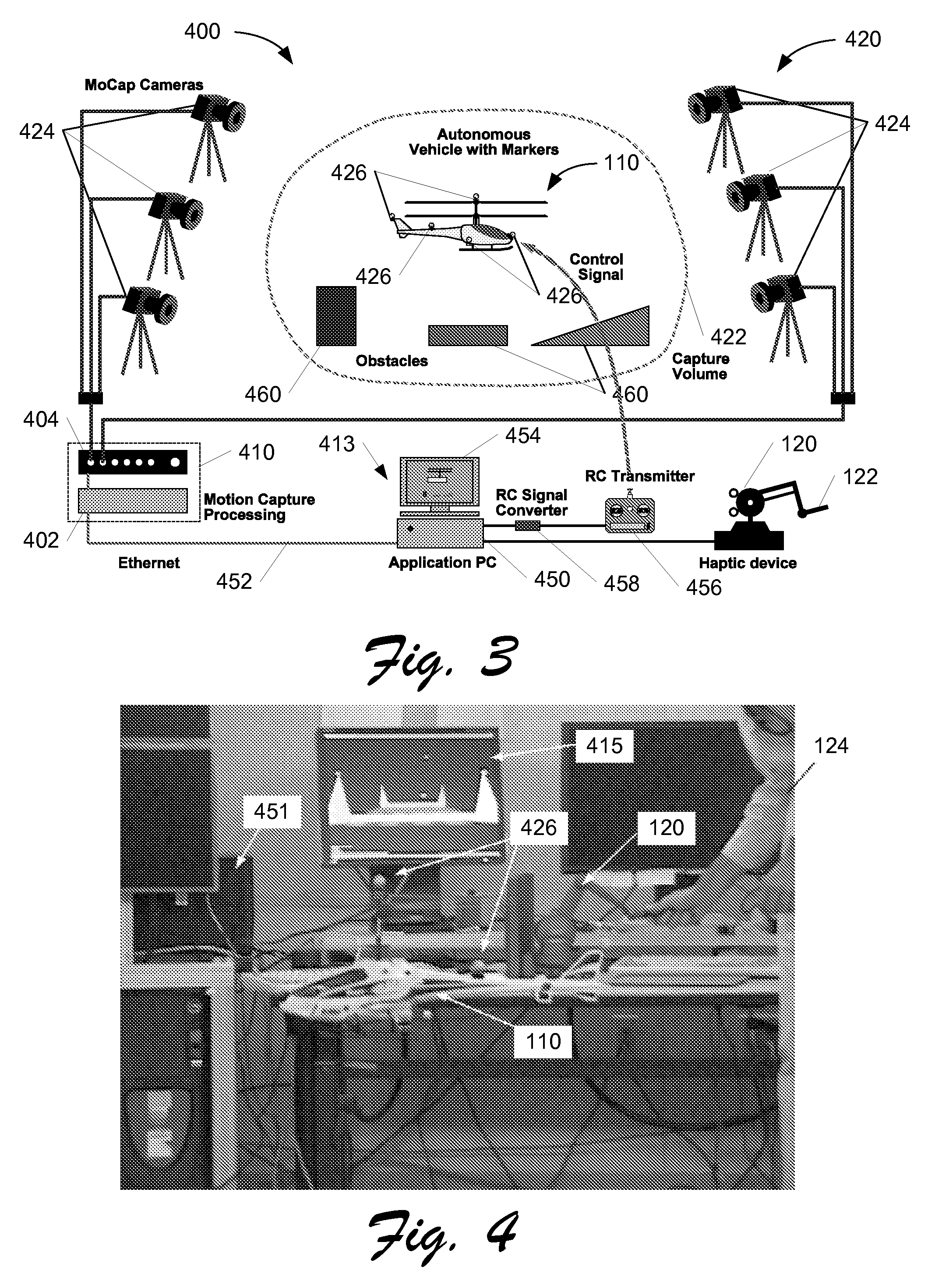
- A haptics-enabled teleoperation system that provides position and orientation control with haptic force feedback using a control component configured in a closed-loop feedback manner, incorporating a motion capture system for six degree-of-freedom position data and a haptic I/O device to simulate the physical sensations of the vehicle's motion, allowing operators to feel inertia, contact, and turbulence forces.

ROI Analysis Framework for Prototyping Method Selection
The ROI analysis framework for prototyping method selection requires a comprehensive evaluation methodology that considers both quantitative and qualitative factors when comparing haptic teleoperation systems against traditional physical prototyping approaches. This framework establishes standardized metrics and assessment criteria to enable objective decision-making in prototyping investments.
The foundation of this framework rests on three primary cost categories: initial capital expenditure, operational expenses, and opportunity costs. Initial capital expenditure encompasses hardware acquisition costs for haptic devices, computing infrastructure, and software licensing fees for teleoperation systems, compared against traditional prototyping equipment, materials, and facility requirements. Operational expenses include ongoing maintenance, software updates, training costs, and personnel requirements for each approach.
Time-to-market considerations form a critical component of the ROI calculation. Haptic teleoperation systems typically demonstrate accelerated iteration cycles, enabling rapid design modifications without physical material constraints. This temporal advantage translates into competitive positioning benefits and earlier revenue generation opportunities, which must be quantified within the framework through discounted cash flow analysis.
Risk assessment metrics constitute another essential element, evaluating factors such as design validation accuracy, stakeholder acceptance rates, and technical feasibility confirmation. Physical prototyping offers tangible validation benefits but carries higher material waste risks and longer revision cycles. Haptic systems provide immediate feedback capabilities but may introduce validation gaps for certain physical properties.
The framework incorporates scalability factors, measuring how each approach performs across different project volumes and complexity levels. Haptic teleoperation systems demonstrate favorable scaling characteristics for high-iteration projects, while physical prototyping may prove more cost-effective for single-instance or low-volume applications.
Quality metrics integration ensures comprehensive evaluation beyond pure cost considerations. This includes measurement precision, user experience fidelity, and stakeholder communication effectiveness. The framework establishes weighted scoring systems that balance quantitative financial metrics with qualitative performance indicators, enabling organizations to make informed prototyping method selections aligned with their specific project requirements and strategic objectives.
The foundation of this framework rests on three primary cost categories: initial capital expenditure, operational expenses, and opportunity costs. Initial capital expenditure encompasses hardware acquisition costs for haptic devices, computing infrastructure, and software licensing fees for teleoperation systems, compared against traditional prototyping equipment, materials, and facility requirements. Operational expenses include ongoing maintenance, software updates, training costs, and personnel requirements for each approach.
Time-to-market considerations form a critical component of the ROI calculation. Haptic teleoperation systems typically demonstrate accelerated iteration cycles, enabling rapid design modifications without physical material constraints. This temporal advantage translates into competitive positioning benefits and earlier revenue generation opportunities, which must be quantified within the framework through discounted cash flow analysis.
Risk assessment metrics constitute another essential element, evaluating factors such as design validation accuracy, stakeholder acceptance rates, and technical feasibility confirmation. Physical prototyping offers tangible validation benefits but carries higher material waste risks and longer revision cycles. Haptic systems provide immediate feedback capabilities but may introduce validation gaps for certain physical properties.
The framework incorporates scalability factors, measuring how each approach performs across different project volumes and complexity levels. Haptic teleoperation systems demonstrate favorable scaling characteristics for high-iteration projects, while physical prototyping may prove more cost-effective for single-instance or low-volume applications.
Quality metrics integration ensures comprehensive evaluation beyond pure cost considerations. This includes measurement precision, user experience fidelity, and stakeholder communication effectiveness. The framework establishes weighted scoring systems that balance quantitative financial metrics with qualitative performance indicators, enabling organizations to make informed prototyping method selections aligned with their specific project requirements and strategic objectives.
Risk Assessment in Haptic vs Physical Prototyping Investment
Investment decisions between haptic teleoperation and physical prototyping systems carry distinct risk profiles that organizations must carefully evaluate. Financial risks represent the most immediate concern, as haptic teleoperation systems typically require substantial upfront capital investment ranging from $50,000 to $500,000 for enterprise-grade solutions. This contrasts with physical prototyping approaches where costs can be distributed across multiple iterations, though cumulative expenses may eventually exceed haptic system investments.
Technology obsolescence poses a significant risk factor for haptic investments. Rapid advancement in haptic feedback technologies, force rendering algorithms, and tactile display systems creates uncertainty about system longevity. Organizations face the possibility that their haptic infrastructure may become outdated within 3-5 years, requiring additional investment to maintain competitive advantages. Physical prototyping methods, while less technologically sophisticated, demonstrate greater stability and predictable evolution patterns.
Operational risks differ substantially between approaches. Haptic teleoperation systems introduce dependencies on specialized software, network connectivity, and technical expertise that may not be readily available. System failures or technical issues can halt entire development processes, creating project delays and cost overruns. Physical prototyping maintains operational independence but faces risks related to material availability, manufacturing capacity constraints, and quality control variations.
Market acceptance risks vary significantly across industries and applications. While haptic teleoperation offers innovative capabilities, market readiness and customer acceptance remain uncertain in many sectors. Organizations investing heavily in haptic-based development processes may discover that end-users prefer traditionally developed products, limiting return on investment potential.
Scalability risks present different challenges for each approach. Haptic systems may struggle with concurrent user limitations and computational bottlenecks as project complexity increases. Physical prototyping faces scalability challenges related to manufacturing capacity, material costs, and quality consistency across larger production volumes.
Regulatory and compliance risks must be considered, particularly in industries with strict safety requirements. Haptic teleoperation systems may face uncertain regulatory pathways, while physical prototyping benefits from established compliance frameworks and validation procedures.
Technology obsolescence poses a significant risk factor for haptic investments. Rapid advancement in haptic feedback technologies, force rendering algorithms, and tactile display systems creates uncertainty about system longevity. Organizations face the possibility that their haptic infrastructure may become outdated within 3-5 years, requiring additional investment to maintain competitive advantages. Physical prototyping methods, while less technologically sophisticated, demonstrate greater stability and predictable evolution patterns.
Operational risks differ substantially between approaches. Haptic teleoperation systems introduce dependencies on specialized software, network connectivity, and technical expertise that may not be readily available. System failures or technical issues can halt entire development processes, creating project delays and cost overruns. Physical prototyping maintains operational independence but faces risks related to material availability, manufacturing capacity constraints, and quality control variations.
Market acceptance risks vary significantly across industries and applications. While haptic teleoperation offers innovative capabilities, market readiness and customer acceptance remain uncertain in many sectors. Organizations investing heavily in haptic-based development processes may discover that end-users prefer traditionally developed products, limiting return on investment potential.
Scalability risks present different challenges for each approach. Haptic systems may struggle with concurrent user limitations and computational bottlenecks as project complexity increases. Physical prototyping faces scalability challenges related to manufacturing capacity, material costs, and quality consistency across larger production volumes.
Regulatory and compliance risks must be considered, particularly in industries with strict safety requirements. Haptic teleoperation systems may face uncertain regulatory pathways, while physical prototyping benefits from established compliance frameworks and validation procedures.
Unlock deeper insights with Patsnap Eureka Quick Research — get a full tech report to explore trends and direct your research. Try now!
Generate Your Research Report Instantly with AI Agent
Supercharge your innovation with Patsnap Eureka AI Agent Platform!