

How to Implement Model Predictive Control for SEA Force Tracking
APR 30, 20269 MIN READ
Generate Your Research Report Instantly with AI Agent
PatSnap Eureka helps you evaluate technical feasibility & market potential.
SEA Force Control Background and Objectives
Series Elastic Actuators (SEAs) represent a paradigm shift in robotic actuation technology, incorporating compliant elements between the motor and load to achieve safer human-robot interaction and improved force control capabilities. The elastic element, typically a spring, enables precise force measurement through displacement sensing while providing inherent safety through mechanical compliance. This design philosophy has gained significant traction in applications ranging from rehabilitation robotics to collaborative industrial systems.
The fundamental challenge in SEA force tracking lies in managing the complex dynamics introduced by the elastic coupling. Unlike rigid actuators where motor torque directly translates to output force, SEAs exhibit oscillatory behavior and require sophisticated control strategies to achieve desired force profiles. The spring element creates a second-order system with potential stability issues, particularly when high bandwidth force tracking is required.
Model Predictive Control emerges as a promising solution for SEA force tracking due to its ability to handle system constraints, predict future behavior, and optimize control actions over a finite horizon. MPC's constraint-handling capabilities are particularly valuable in SEA applications where actuator limits, safety boundaries, and performance specifications must be simultaneously satisfied. The predictive nature of MPC allows for proactive compensation of the inherent delays and oscillations characteristic of elastic systems.
Current research objectives focus on developing MPC frameworks that can effectively balance tracking performance with system stability while maintaining computational efficiency for real-time implementation. Key technical goals include minimizing force tracking errors, reducing settling times, and ensuring robust performance across varying load conditions and reference trajectories.
The integration of MPC with SEA systems presents unique opportunities to leverage the actuator's inherent compliance while achieving precise force control. This combination addresses critical needs in modern robotics applications where both safety and performance are paramount, particularly in scenarios involving direct human contact or delicate manipulation tasks.
The fundamental challenge in SEA force tracking lies in managing the complex dynamics introduced by the elastic coupling. Unlike rigid actuators where motor torque directly translates to output force, SEAs exhibit oscillatory behavior and require sophisticated control strategies to achieve desired force profiles. The spring element creates a second-order system with potential stability issues, particularly when high bandwidth force tracking is required.
Model Predictive Control emerges as a promising solution for SEA force tracking due to its ability to handle system constraints, predict future behavior, and optimize control actions over a finite horizon. MPC's constraint-handling capabilities are particularly valuable in SEA applications where actuator limits, safety boundaries, and performance specifications must be simultaneously satisfied. The predictive nature of MPC allows for proactive compensation of the inherent delays and oscillations characteristic of elastic systems.
Current research objectives focus on developing MPC frameworks that can effectively balance tracking performance with system stability while maintaining computational efficiency for real-time implementation. Key technical goals include minimizing force tracking errors, reducing settling times, and ensuring robust performance across varying load conditions and reference trajectories.
The integration of MPC with SEA systems presents unique opportunities to leverage the actuator's inherent compliance while achieving precise force control. This combination addresses critical needs in modern robotics applications where both safety and performance are paramount, particularly in scenarios involving direct human contact or delicate manipulation tasks.
Market Demand for Advanced SEA Control Systems
The global market for advanced Series Elastic Actuator (SEA) control systems is experiencing significant growth driven by the increasing demand for precise force control in robotics and automation applications. Industries ranging from manufacturing and healthcare to aerospace and defense are seeking sophisticated control solutions that can deliver accurate force tracking while maintaining system stability and safety.
Manufacturing sectors, particularly automotive and electronics assembly, represent a substantial portion of market demand. These industries require robotic systems capable of performing delicate assembly tasks, quality inspection, and material handling operations where force feedback is critical. The ability to implement Model Predictive Control for SEA force tracking addresses the need for predictive force regulation, enabling robots to anticipate and adjust to varying load conditions in real-time.
Healthcare and rehabilitation robotics constitute another rapidly expanding market segment. Prosthetic devices, exoskeletons, and rehabilitation robots require advanced force control systems to ensure safe and natural human-machine interaction. The demand for SEA systems with predictive control capabilities is particularly strong in this sector, as these applications require precise force modulation to accommodate varying patient conditions and movement patterns.
The aerospace and defense industries are increasingly adopting SEA technology for applications including unmanned aerial vehicles, robotic maintenance systems, and precision manipulation tasks in space environments. These applications demand highly reliable force tracking systems that can operate under extreme conditions while maintaining precise control performance.
Market growth is further accelerated by the rising adoption of collaborative robots in industrial settings. As safety regulations become more stringent, manufacturers are seeking control systems that can provide inherent compliance and force limitation capabilities. Advanced SEA control systems with predictive algorithms offer superior performance compared to traditional impedance control methods.
The integration of artificial intelligence and machine learning technologies is creating new market opportunities for sophisticated control algorithms. Companies are increasingly willing to invest in advanced control systems that can adapt to changing operational conditions and improve performance over time through learning mechanisms.
Regional demand patterns show strong growth in Asia-Pacific markets, driven by rapid industrialization and increasing automation adoption. North American and European markets demonstrate steady demand focused on high-precision applications and safety-critical systems, reflecting mature industrial bases with emphasis on advanced technology integration.
Manufacturing sectors, particularly automotive and electronics assembly, represent a substantial portion of market demand. These industries require robotic systems capable of performing delicate assembly tasks, quality inspection, and material handling operations where force feedback is critical. The ability to implement Model Predictive Control for SEA force tracking addresses the need for predictive force regulation, enabling robots to anticipate and adjust to varying load conditions in real-time.
Healthcare and rehabilitation robotics constitute another rapidly expanding market segment. Prosthetic devices, exoskeletons, and rehabilitation robots require advanced force control systems to ensure safe and natural human-machine interaction. The demand for SEA systems with predictive control capabilities is particularly strong in this sector, as these applications require precise force modulation to accommodate varying patient conditions and movement patterns.
The aerospace and defense industries are increasingly adopting SEA technology for applications including unmanned aerial vehicles, robotic maintenance systems, and precision manipulation tasks in space environments. These applications demand highly reliable force tracking systems that can operate under extreme conditions while maintaining precise control performance.
Market growth is further accelerated by the rising adoption of collaborative robots in industrial settings. As safety regulations become more stringent, manufacturers are seeking control systems that can provide inherent compliance and force limitation capabilities. Advanced SEA control systems with predictive algorithms offer superior performance compared to traditional impedance control methods.
The integration of artificial intelligence and machine learning technologies is creating new market opportunities for sophisticated control algorithms. Companies are increasingly willing to invest in advanced control systems that can adapt to changing operational conditions and improve performance over time through learning mechanisms.
Regional demand patterns show strong growth in Asia-Pacific markets, driven by rapid industrialization and increasing automation adoption. North American and European markets demonstrate steady demand focused on high-precision applications and safety-critical systems, reflecting mature industrial bases with emphasis on advanced technology integration.
Current MPC Implementation Challenges in SEA
The implementation of Model Predictive Control for Series Elastic Actuator force tracking faces several fundamental computational challenges that significantly impact real-time performance. The primary bottleneck lies in the online optimization process, where quadratic programming solvers must compute optimal control sequences within strict timing constraints. Traditional MPC formulations require solving complex optimization problems at each sampling instant, often demanding computational resources that exceed the capabilities of embedded control systems commonly used in robotic applications.
Real-time constraints present another critical challenge, particularly in applications requiring high-frequency control loops. SEA systems typically operate with sampling frequencies ranging from 1-10 kHz, leaving minimal time for MPC calculations. The computational burden becomes more severe when dealing with longer prediction horizons, which are often necessary to achieve satisfactory tracking performance and stability margins. This creates a fundamental trade-off between control performance and computational feasibility.
Model accuracy and parameter uncertainty pose significant obstacles to effective MPC implementation in SEA systems. The nonlinear dynamics of elastic elements, friction characteristics, and varying load conditions introduce modeling errors that can severely degrade controller performance. Traditional MPC formulations assume perfect model knowledge, but real SEA systems exhibit parameter variations due to temperature changes, wear, and manufacturing tolerances. These uncertainties can lead to suboptimal control actions and potential instability.
Constraint handling represents another major implementation challenge. SEA systems must respect multiple physical limitations including actuator force limits, velocity constraints, and safety boundaries. Formulating these constraints in a computationally efficient manner while ensuring feasibility throughout the prediction horizon requires careful consideration. Infeasible optimization problems can cause controller failures, necessitating robust constraint formulation strategies.
The integration of force feedback and state estimation adds complexity to MPC implementation. SEA force sensors introduce measurement noise and potential delays that must be accounted for in the control design. State observers or Kalman filters are often required to estimate unmeasured states, introducing additional computational overhead and potential sources of error. The coupling between estimation accuracy and control performance creates interdependent design challenges that complicate the overall implementation process.
Real-time constraints present another critical challenge, particularly in applications requiring high-frequency control loops. SEA systems typically operate with sampling frequencies ranging from 1-10 kHz, leaving minimal time for MPC calculations. The computational burden becomes more severe when dealing with longer prediction horizons, which are often necessary to achieve satisfactory tracking performance and stability margins. This creates a fundamental trade-off between control performance and computational feasibility.
Model accuracy and parameter uncertainty pose significant obstacles to effective MPC implementation in SEA systems. The nonlinear dynamics of elastic elements, friction characteristics, and varying load conditions introduce modeling errors that can severely degrade controller performance. Traditional MPC formulations assume perfect model knowledge, but real SEA systems exhibit parameter variations due to temperature changes, wear, and manufacturing tolerances. These uncertainties can lead to suboptimal control actions and potential instability.
Constraint handling represents another major implementation challenge. SEA systems must respect multiple physical limitations including actuator force limits, velocity constraints, and safety boundaries. Formulating these constraints in a computationally efficient manner while ensuring feasibility throughout the prediction horizon requires careful consideration. Infeasible optimization problems can cause controller failures, necessitating robust constraint formulation strategies.
The integration of force feedback and state estimation adds complexity to MPC implementation. SEA force sensors introduce measurement noise and potential delays that must be accounted for in the control design. State observers or Kalman filters are often required to estimate unmeasured states, introducing additional computational overhead and potential sources of error. The coupling between estimation accuracy and control performance creates interdependent design challenges that complicate the overall implementation process.
Existing MPC Solutions for SEA Force Tracking
01 Adaptive Model Predictive Control for Force Tracking
Advanced control algorithms that adapt model parameters in real-time to improve force tracking performance. These methods utilize adaptive mechanisms to handle system uncertainties and parameter variations, ensuring robust force control under changing operating conditions. The adaptive approach enhances tracking accuracy by continuously updating the predictive model based on system feedback.- Adaptive Model Predictive Control for Force Tracking: Advanced control algorithms that adapt model parameters in real-time to improve force tracking performance. These methods utilize online parameter estimation and adaptive prediction models to handle system uncertainties and variations in operating conditions. The adaptive approach enhances tracking accuracy by continuously updating the control model based on measured force feedback and system response.
- Robust Model Predictive Control with Disturbance Rejection: Control strategies that incorporate disturbance observers and robust optimization techniques to maintain force tracking performance under external disturbances and model uncertainties. These approaches use predictive models with uncertainty bounds and implement constraint handling methods to ensure stable force control even in the presence of system perturbations and measurement noise.
- Multi-objective Optimization in Force Tracking Control: Control frameworks that simultaneously optimize multiple performance criteria including tracking accuracy, energy consumption, and system stability. These methods employ weighted cost functions and Pareto optimization techniques to balance competing objectives while maintaining precise force control. The approach considers both transient and steady-state performance requirements.
- Nonlinear Model Predictive Control for Complex Force Dynamics: Advanced control methodologies designed to handle nonlinear system dynamics and complex force interaction models. These techniques utilize nonlinear prediction models and specialized optimization algorithms to achieve accurate force tracking in systems with significant nonlinearities, friction effects, and complex mechanical interactions.
- Real-time Implementation and Computational Optimization: Efficient computational algorithms and implementation strategies for real-time model predictive control in force tracking applications. These approaches focus on reducing computational complexity through approximation methods, parallel processing techniques, and optimized solver algorithms while maintaining control performance within strict timing constraints required for force control systems.
02 Robotic Force Control with Model Predictive Control
Implementation of model predictive control strategies specifically designed for robotic systems requiring precise force tracking capabilities. These approaches focus on controlling contact forces in robotic manipulation tasks, assembly operations, and human-robot interaction scenarios. The control methods incorporate force feedback and predictive modeling to achieve desired force trajectories while maintaining system stability.Expand Specific Solutions03 Multi-objective Force Tracking Control Systems
Control frameworks that simultaneously optimize multiple objectives including force tracking accuracy, energy efficiency, and system constraints. These systems balance competing requirements such as tracking performance and actuator limitations through sophisticated optimization algorithms. The multi-objective approach ensures comprehensive system performance while maintaining force control precision.Expand Specific Solutions04 Nonlinear Model Predictive Control for Force Applications
Specialized control techniques that handle nonlinear system dynamics in force tracking applications. These methods address complex nonlinear behaviors in mechanical systems, actuators, and contact dynamics through advanced mathematical modeling and optimization. The nonlinear approach provides superior performance for systems with significant nonlinearities and complex force interaction patterns.Expand Specific Solutions05 Distributed and Networked Force Control Systems
Control architectures that implement model predictive control across distributed systems or networked environments for coordinated force tracking. These systems handle communication delays, network constraints, and coordination between multiple force-controlled subsystems. The distributed approach enables scalable force control solutions for complex multi-agent systems and networked robotic platforms.Expand Specific Solutions
Key Players in SEA and MPC Technology
The competitive landscape for implementing Model Predictive Control for SEA Force Tracking is characterized by an emerging technology sector with significant growth potential driven by increasing demand for precise robotic control systems. The market remains in early development stages, primarily concentrated within academic research institutions rather than commercial entities. Technology maturity varies considerably across players, with leading Chinese universities like Zhejiang University, Northwestern Polytechnical University, and Harbin Engineering University demonstrating advanced capabilities in control systems research. Maritime-focused institutions including Dalian Maritime University and Ocean University of China contribute specialized expertise in marine applications. International presence is represented by Michigan Technological University and Universität Rostock, while industrial players like China Ship Scientific Research Center and Nabtesco Corp. bridge academic research with practical implementation, indicating a transition toward commercial viability in specialized applications.
Zhejiang University
Technical Solution: Developed advanced MPC algorithms for SEA force tracking with adaptive parameter tuning capabilities. Their approach integrates real-time system identification with constrained optimization to handle the inherent compliance and nonlinearities of Series Elastic Actuators. The control framework employs a cascaded structure where the outer loop performs force control using MPC while the inner loop manages motor position control. They have demonstrated significant improvements in force tracking accuracy with reduced settling time compared to traditional PID controllers, particularly in applications requiring precise force regulation under varying load conditions.
Strengths: Strong theoretical foundation and proven track record in control systems research. Weaknesses: Limited industrial implementation and scalability concerns for real-time applications.
Northwestern Polytechnical University
Technical Solution: Implemented robust MPC strategies for SEA systems focusing on disturbance rejection and model uncertainty handling. Their methodology incorporates tube-based MPC with invariant sets to guarantee stability and constraint satisfaction even under model mismatches. The approach uses a simplified linear model of the SEA dynamics while accounting for spring deflection measurements to estimate actual force output. They have successfully validated their control scheme on robotic manipulator applications where precise force control is critical for safe human-robot interaction.
Strengths: Excellent expertise in aerospace control systems and robust control theory. Weaknesses: Complex implementation requirements and high computational overhead for real-time systems.
Core MPC Algorithms for SEA Applications
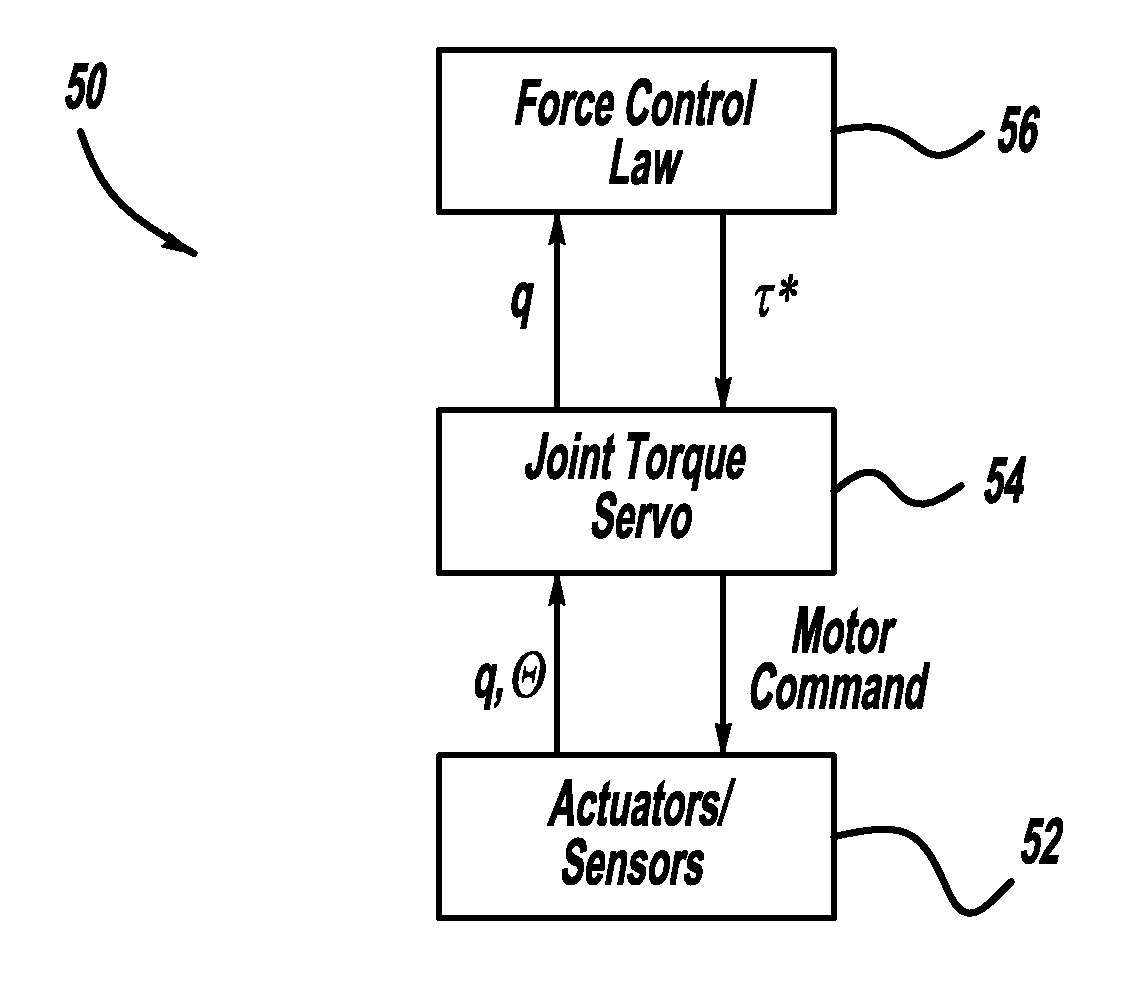
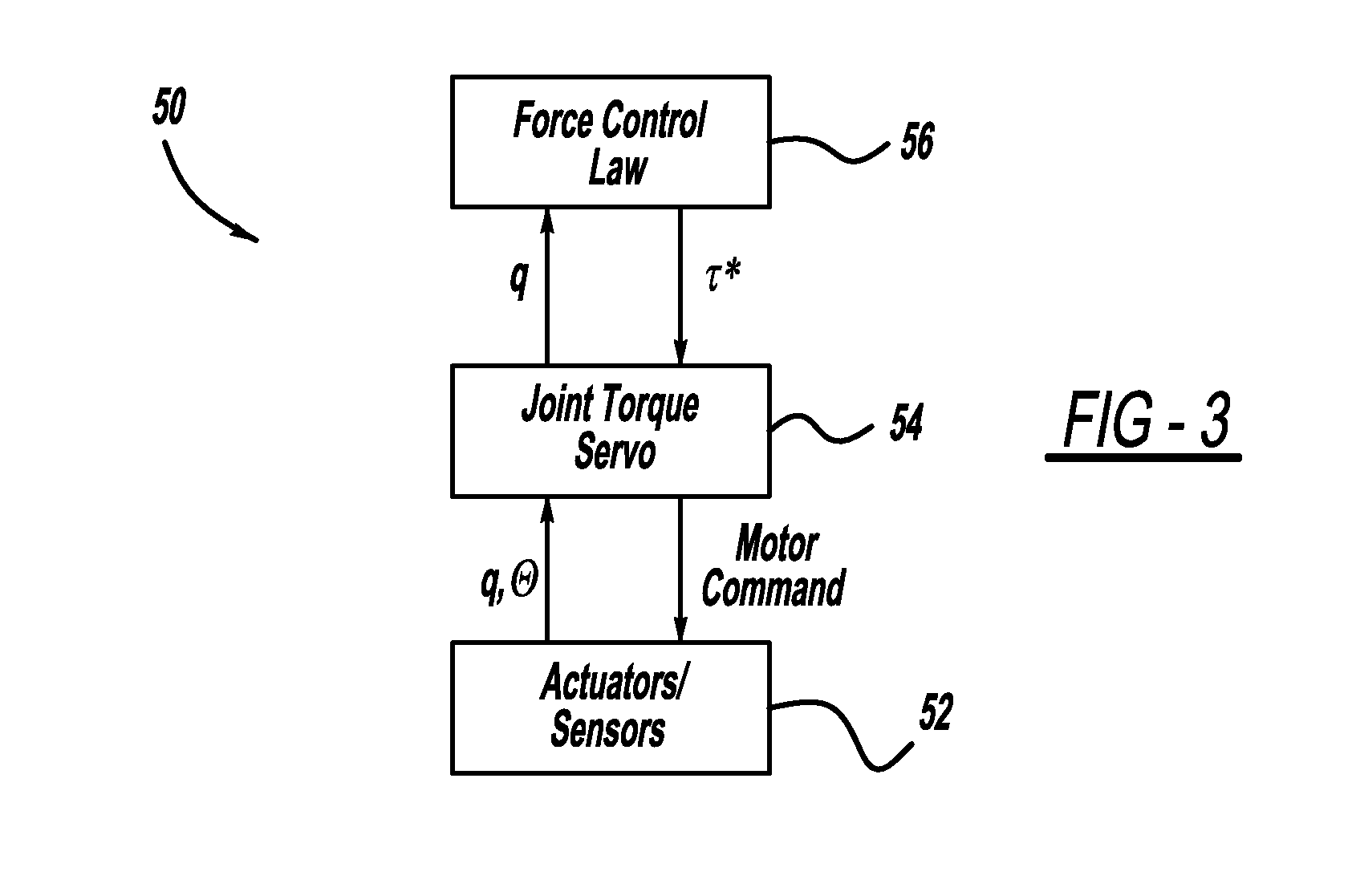
Architecture for robust force and impedance control of series elastic actuators
PatentInactiveUS20110190934A1
Innovation
- An SEA architecture that uses high-resolution position sensors to measure the orientation of the motor shaft and load, coupled with an embedded high-speed processor to determine torque on the spring, allowing for local torque control without direct force measurement or strain gauges, and receives reference torque commands from a remote controller for precise impedance and positioning control.
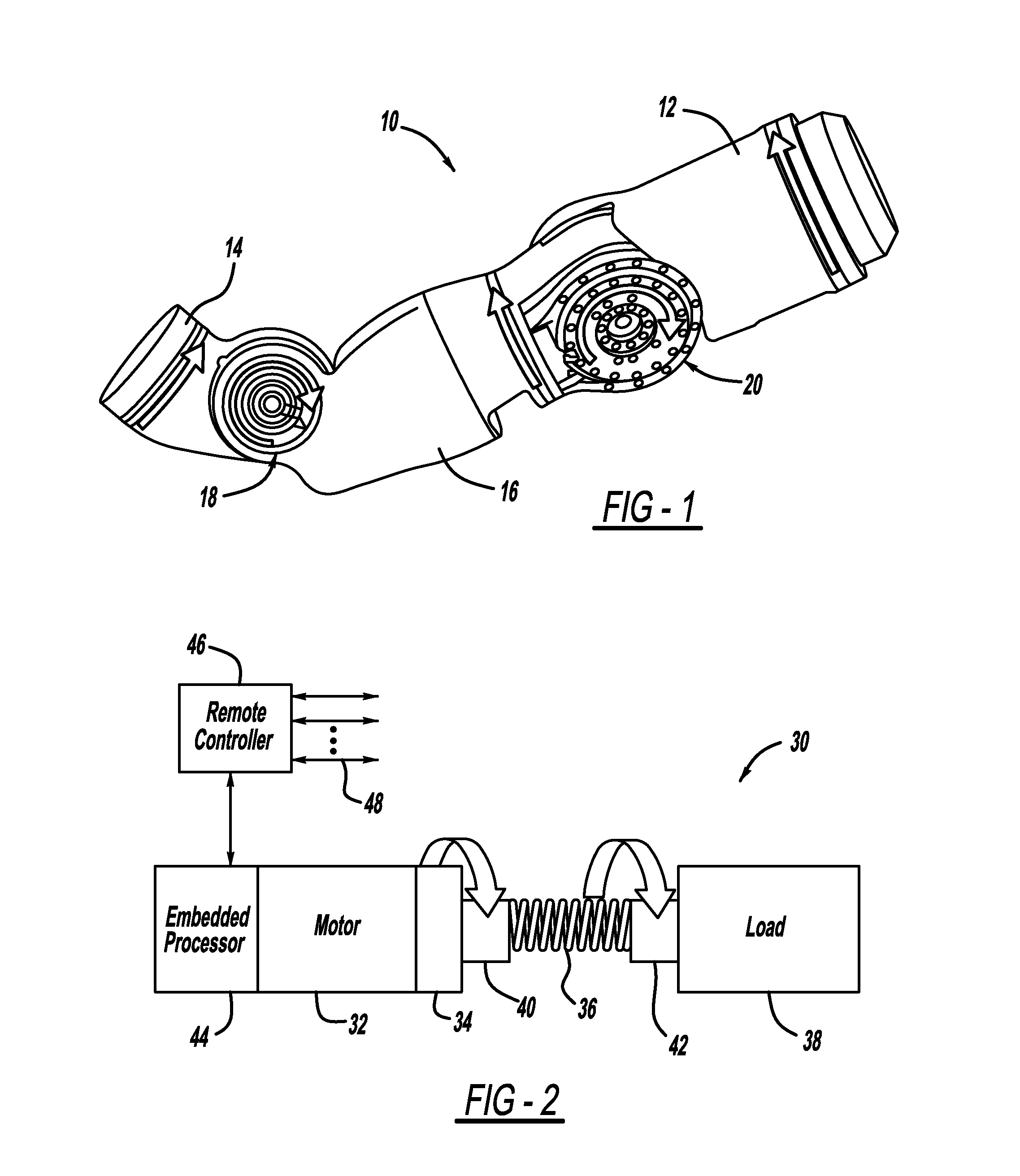
Series elastic actuator, method for controlling series elastic actuator and system thereof
PatentActiveUS20210013773A1
Innovation
- A series elastic actuator system with a motor-side and load-side rotation unit, featuring elastic members between them, where frames accommodate these members, enabling efficient rotary motion control through torque and position control switching based on external forces measured by sensors.




Safety Standards for Robotic Actuator Control
Safety standards for robotic actuator control in Model Predictive Control (MPC) implementations for Series Elastic Actuator (SEA) force tracking represent a critical framework ensuring operational reliability and human safety. These standards encompass multiple layers of protection mechanisms that must be integrated throughout the control architecture to prevent system failures and mitigate potential hazards during force-sensitive operations.
The foundational safety requirements mandate the implementation of fail-safe mechanisms within the MPC controller design. These include emergency stop protocols that can immediately halt actuator motion when force tracking errors exceed predefined thresholds. The control system must incorporate redundant sensing capabilities to detect anomalous force measurements or actuator malfunctions, ensuring continuous monitoring of system health during operation.
Force limiting constraints constitute another essential safety standard, requiring MPC algorithms to enforce strict upper and lower bounds on commanded forces. These constraints must account for both steady-state and transient conditions, preventing the actuator from generating forces that could damage equipment or pose risks to nearby personnel. The implementation should include dynamic constraint adaptation based on operational context and environmental conditions.
Real-time monitoring and diagnostic capabilities form a crucial component of safety standards, mandating continuous assessment of controller performance metrics. The system must track prediction accuracy, constraint violations, and computational delays that could compromise control effectiveness. Automated fault detection algorithms should identify degraded performance conditions and trigger appropriate safety responses.
Communication safety protocols ensure reliable data exchange between MPC controllers and higher-level supervisory systems. These standards specify timeout mechanisms, data integrity verification, and graceful degradation procedures when communication links are compromised. The control architecture must maintain safe operation even during temporary communication failures.
Certification requirements for safety-critical applications demand rigorous testing and validation procedures for MPC-based SEA control systems. These include hardware-in-the-loop testing, failure mode analysis, and compliance verification with relevant industrial safety standards such as ISO 13849 or IEC 61508, depending on the specific application domain and risk assessment outcomes.
The foundational safety requirements mandate the implementation of fail-safe mechanisms within the MPC controller design. These include emergency stop protocols that can immediately halt actuator motion when force tracking errors exceed predefined thresholds. The control system must incorporate redundant sensing capabilities to detect anomalous force measurements or actuator malfunctions, ensuring continuous monitoring of system health during operation.
Force limiting constraints constitute another essential safety standard, requiring MPC algorithms to enforce strict upper and lower bounds on commanded forces. These constraints must account for both steady-state and transient conditions, preventing the actuator from generating forces that could damage equipment or pose risks to nearby personnel. The implementation should include dynamic constraint adaptation based on operational context and environmental conditions.
Real-time monitoring and diagnostic capabilities form a crucial component of safety standards, mandating continuous assessment of controller performance metrics. The system must track prediction accuracy, constraint violations, and computational delays that could compromise control effectiveness. Automated fault detection algorithms should identify degraded performance conditions and trigger appropriate safety responses.
Communication safety protocols ensure reliable data exchange between MPC controllers and higher-level supervisory systems. These standards specify timeout mechanisms, data integrity verification, and graceful degradation procedures when communication links are compromised. The control architecture must maintain safe operation even during temporary communication failures.
Certification requirements for safety-critical applications demand rigorous testing and validation procedures for MPC-based SEA control systems. These include hardware-in-the-loop testing, failure mode analysis, and compliance verification with relevant industrial safety standards such as ISO 13849 or IEC 61508, depending on the specific application domain and risk assessment outcomes.
Real-time Implementation Considerations for MPC
Real-time implementation of Model Predictive Control for Series Elastic Actuator force tracking presents several critical computational and system-level challenges that must be addressed to ensure effective performance. The primary constraint lies in the computational burden associated with solving the optimization problem within each control cycle, which typically requires completion within milliseconds for robotic applications.
The computational complexity of MPC stems from the need to solve a quadratic programming problem at each sampling instant. For SEA force tracking, this involves predicting future system behavior over a finite horizon while considering actuator constraints, force limitations, and system dynamics. Modern embedded processors and real-time computing platforms have made significant strides in handling these calculations, but careful algorithm design remains essential.
Sampling frequency selection represents a fundamental trade-off between control performance and computational feasibility. Higher sampling rates enable better disturbance rejection and tracking accuracy but demand faster optimization solvers. For SEA applications, sampling frequencies typically range from 100Hz to 1kHz, depending on the specific application requirements and available computational resources.
Hardware acceleration techniques have emerged as viable solutions for meeting real-time constraints. Field-Programmable Gate Arrays and dedicated optimization processors can significantly reduce computation time by parallelizing matrix operations and implementing custom optimization algorithms. Graphics Processing Units also offer potential for accelerating MPC calculations through parallel processing capabilities.
Algorithm optimization strategies focus on reducing computational complexity without compromising control performance. Techniques include warm-starting optimization solvers using previous solutions, implementing explicit MPC approaches that pre-compute control laws offline, and utilizing fast gradient methods specifically designed for embedded applications.
Memory management becomes crucial when implementing MPC on resource-constrained embedded systems. Efficient data structures and memory allocation strategies must be employed to handle prediction matrices, constraint formulations, and optimization variables while maintaining real-time performance guarantees.
System integration considerations encompass sensor data acquisition, actuator command generation, and communication protocols. The entire control loop must operate deterministically with minimal jitter to ensure stable force tracking performance. Real-time operating systems and dedicated control hardware often provide the necessary timing guarantees for successful MPC implementation in SEA systems.
The computational complexity of MPC stems from the need to solve a quadratic programming problem at each sampling instant. For SEA force tracking, this involves predicting future system behavior over a finite horizon while considering actuator constraints, force limitations, and system dynamics. Modern embedded processors and real-time computing platforms have made significant strides in handling these calculations, but careful algorithm design remains essential.
Sampling frequency selection represents a fundamental trade-off between control performance and computational feasibility. Higher sampling rates enable better disturbance rejection and tracking accuracy but demand faster optimization solvers. For SEA applications, sampling frequencies typically range from 100Hz to 1kHz, depending on the specific application requirements and available computational resources.
Hardware acceleration techniques have emerged as viable solutions for meeting real-time constraints. Field-Programmable Gate Arrays and dedicated optimization processors can significantly reduce computation time by parallelizing matrix operations and implementing custom optimization algorithms. Graphics Processing Units also offer potential for accelerating MPC calculations through parallel processing capabilities.
Algorithm optimization strategies focus on reducing computational complexity without compromising control performance. Techniques include warm-starting optimization solvers using previous solutions, implementing explicit MPC approaches that pre-compute control laws offline, and utilizing fast gradient methods specifically designed for embedded applications.
Memory management becomes crucial when implementing MPC on resource-constrained embedded systems. Efficient data structures and memory allocation strategies must be employed to handle prediction matrices, constraint formulations, and optimization variables while maintaining real-time performance guarantees.
System integration considerations encompass sensor data acquisition, actuator command generation, and communication protocols. The entire control loop must operate deterministically with minimal jitter to ensure stable force tracking performance. Real-time operating systems and dedicated control hardware often provide the necessary timing guarantees for successful MPC implementation in SEA systems.
Unlock deeper insights with PatSnap Eureka Quick Research — get a full tech report to explore trends and direct your research. Try now!
Generate Your Research Report Instantly with AI Agent
Supercharge your innovation with PatSnap Eureka AI Agent Platform!