

How to reduce grasp force while keeping robotic grasping stable
MAY 8, 20269 MIN READ
Generate Your Research Report Instantly with AI Agent
PatSnap Eureka helps you evaluate technical feasibility & market potential.
Robotic Grasping Force Optimization Background and Goals
Robotic grasping has emerged as one of the most fundamental yet challenging aspects of modern robotics, with applications spanning manufacturing automation, service robotics, medical devices, and space exploration. The evolution of robotic grasping technology has progressed from simple binary grippers to sophisticated multi-fingered hands capable of complex manipulation tasks. However, a persistent challenge remains in achieving the delicate balance between applying sufficient force to maintain stable grasps while minimizing excessive force that can damage objects or waste energy.
The historical development of robotic grasping began with industrial applications in the 1960s, where rigid grippers were designed for repetitive tasks with known objects. As robotics expanded into more diverse environments, the need for adaptive grasping strategies became apparent. Early force control systems relied on simple feedback mechanisms, but these often resulted in either insufficient grip leading to object slippage or excessive force causing damage to delicate items.
Current technological trends indicate a shift toward intelligent force optimization, driven by advances in sensor technology, machine learning algorithms, and materials science. The integration of tactile sensors, vision systems, and force feedback mechanisms has enabled more sophisticated control strategies. However, the complexity of real-world grasping scenarios continues to challenge existing approaches, particularly when dealing with unknown objects, varying surface properties, and dynamic environments.
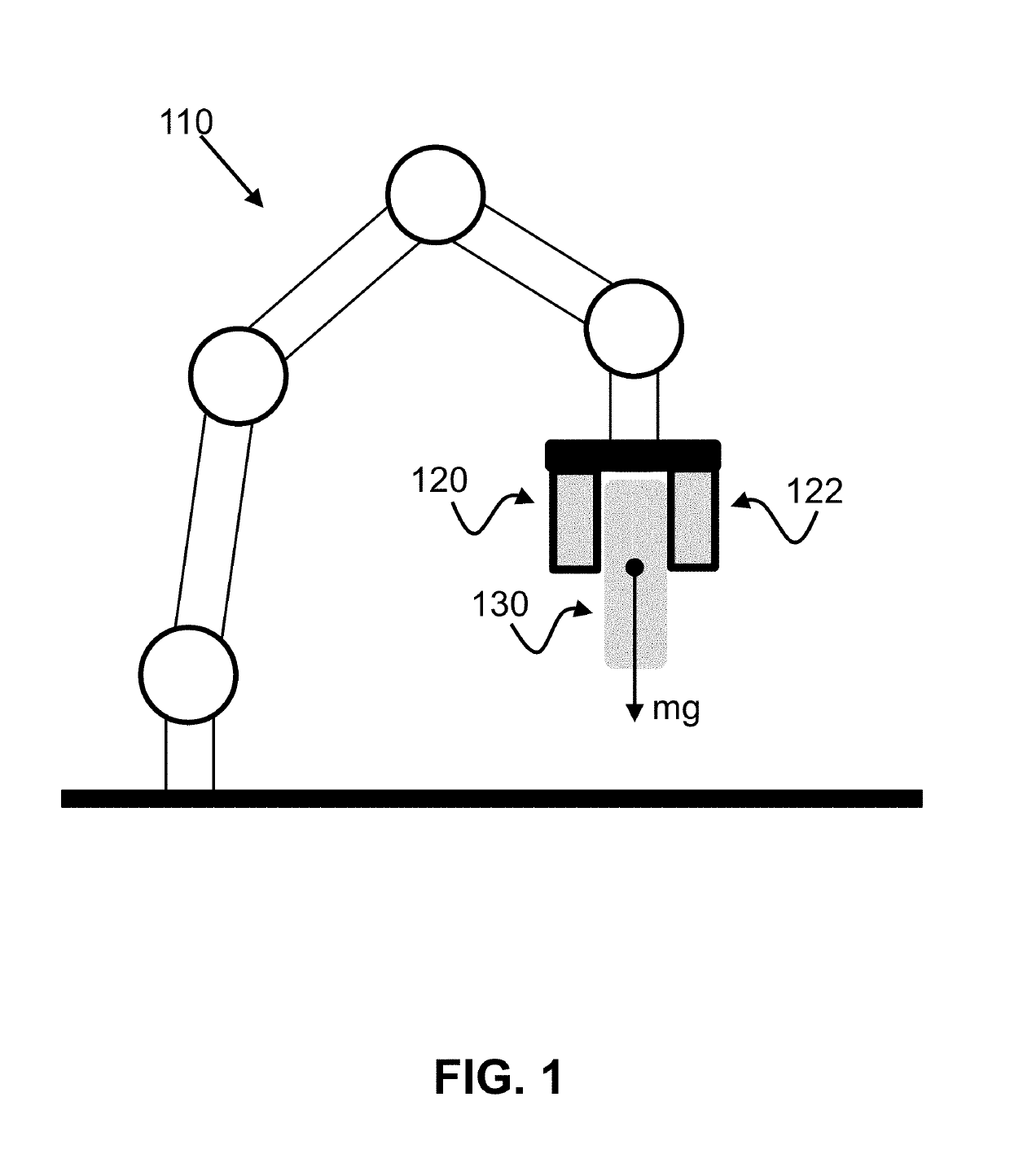
The primary technical objective in robotic grasping force optimization is to develop control algorithms and hardware systems that can dynamically adjust grip force based on real-time feedback while maintaining grasp stability. This involves creating predictive models that can estimate the minimum force required for stable grasping under various conditions, including object weight, surface friction, external disturbances, and manipulation requirements.
Key performance targets include reducing average grasping force by 20-40% compared to traditional safety-margin approaches while maintaining grasp success rates above 95%. Additionally, the technology aims to extend robotic system operational life by reducing mechanical wear, decrease energy consumption, and enable safe human-robot interaction in collaborative environments.
The ultimate goal extends beyond mere force reduction to encompass adaptive intelligence that allows robotic systems to learn optimal grasping strategies for different object categories and environmental conditions, thereby advancing the field toward more versatile and efficient robotic manipulation capabilities.
The historical development of robotic grasping began with industrial applications in the 1960s, where rigid grippers were designed for repetitive tasks with known objects. As robotics expanded into more diverse environments, the need for adaptive grasping strategies became apparent. Early force control systems relied on simple feedback mechanisms, but these often resulted in either insufficient grip leading to object slippage or excessive force causing damage to delicate items.
Current technological trends indicate a shift toward intelligent force optimization, driven by advances in sensor technology, machine learning algorithms, and materials science. The integration of tactile sensors, vision systems, and force feedback mechanisms has enabled more sophisticated control strategies. However, the complexity of real-world grasping scenarios continues to challenge existing approaches, particularly when dealing with unknown objects, varying surface properties, and dynamic environments.
The primary technical objective in robotic grasping force optimization is to develop control algorithms and hardware systems that can dynamically adjust grip force based on real-time feedback while maintaining grasp stability. This involves creating predictive models that can estimate the minimum force required for stable grasping under various conditions, including object weight, surface friction, external disturbances, and manipulation requirements.
Key performance targets include reducing average grasping force by 20-40% compared to traditional safety-margin approaches while maintaining grasp success rates above 95%. Additionally, the technology aims to extend robotic system operational life by reducing mechanical wear, decrease energy consumption, and enable safe human-robot interaction in collaborative environments.
The ultimate goal extends beyond mere force reduction to encompass adaptive intelligence that allows robotic systems to learn optimal grasping strategies for different object categories and environmental conditions, thereby advancing the field toward more versatile and efficient robotic manipulation capabilities.
Market Demand for Gentle Robotic Manipulation Systems
The global robotics market is experiencing unprecedented growth driven by increasing demand for automation across multiple industries, with gentle robotic manipulation systems emerging as a critical technological frontier. Traditional industrial robots, designed primarily for speed and precision in controlled environments, are increasingly inadequate for applications requiring delicate handling and human-robot interaction.
Healthcare robotics represents one of the most promising sectors for gentle manipulation technologies. Surgical robots require precise force control to handle delicate tissues without causing damage, while rehabilitation robots must provide safe physical therapy assistance. The aging global population is driving demand for assistive robotics that can help elderly individuals with daily tasks such as feeding, grooming, and medication handling, all requiring sophisticated force modulation capabilities.
The food and beverage industry presents substantial market opportunities for gentle robotic systems. Automated food processing, packaging, and preparation require robots capable of handling fragile items like fruits, baked goods, and delicate packaging materials without damage. Consumer expectations for food quality and presentation are driving manufacturers to seek robotic solutions that can match human-level dexterity and gentleness.
Electronics manufacturing is another key market segment where gentle manipulation is becoming essential. As electronic components become smaller and more fragile, assembly processes require increasingly precise force control. The semiconductor industry particularly demands ultra-gentle handling capabilities for wafer processing and chip assembly operations.
The rise of collaborative robotics in manufacturing environments has created new market demands for force-sensitive manipulation systems. These cobots must operate safely alongside human workers, requiring advanced force feedback and control mechanisms to prevent injury while maintaining productivity. Industries ranging from automotive assembly to consumer goods manufacturing are investing heavily in these technologies.
E-commerce and logistics sectors are driving demand for gentle robotic systems capable of handling diverse product types with varying fragility levels. Automated warehouses and fulfillment centers require robots that can adapt their grasp force based on package characteristics, reducing product damage and improving customer satisfaction.
Research institutions and universities represent an emerging market segment, investing in gentle manipulation technologies for advancing robotics research and education. This academic demand is fostering innovation and creating a pipeline of skilled professionals familiar with these technologies.
Healthcare robotics represents one of the most promising sectors for gentle manipulation technologies. Surgical robots require precise force control to handle delicate tissues without causing damage, while rehabilitation robots must provide safe physical therapy assistance. The aging global population is driving demand for assistive robotics that can help elderly individuals with daily tasks such as feeding, grooming, and medication handling, all requiring sophisticated force modulation capabilities.
The food and beverage industry presents substantial market opportunities for gentle robotic systems. Automated food processing, packaging, and preparation require robots capable of handling fragile items like fruits, baked goods, and delicate packaging materials without damage. Consumer expectations for food quality and presentation are driving manufacturers to seek robotic solutions that can match human-level dexterity and gentleness.
Electronics manufacturing is another key market segment where gentle manipulation is becoming essential. As electronic components become smaller and more fragile, assembly processes require increasingly precise force control. The semiconductor industry particularly demands ultra-gentle handling capabilities for wafer processing and chip assembly operations.
The rise of collaborative robotics in manufacturing environments has created new market demands for force-sensitive manipulation systems. These cobots must operate safely alongside human workers, requiring advanced force feedback and control mechanisms to prevent injury while maintaining productivity. Industries ranging from automotive assembly to consumer goods manufacturing are investing heavily in these technologies.
E-commerce and logistics sectors are driving demand for gentle robotic systems capable of handling diverse product types with varying fragility levels. Automated warehouses and fulfillment centers require robots that can adapt their grasp force based on package characteristics, reducing product damage and improving customer satisfaction.
Research institutions and universities represent an emerging market segment, investing in gentle manipulation technologies for advancing robotics research and education. This academic demand is fostering innovation and creating a pipeline of skilled professionals familiar with these technologies.
Current Grasp Force Control Challenges and Limitations
Current robotic grasping systems face significant challenges in achieving optimal force control while maintaining grasp stability. Traditional force control approaches often rely on conservative high-force strategies to ensure object security, leading to excessive grip forces that can damage delicate objects, increase energy consumption, and accelerate actuator wear. The fundamental challenge lies in balancing the competing requirements of grasp security and force minimization.
One primary limitation stems from inadequate real-time force feedback mechanisms. Many existing robotic systems lack sufficient tactile sensing capabilities or experience delays in force measurement and processing. This results in reactive rather than predictive force control, where robots apply excessive initial forces as a safety margin against potential slippage. The absence of distributed tactile sensing across gripper surfaces further compounds this issue, limiting the system's ability to detect localized pressure points and force distribution patterns.
Sensor integration and calibration present additional technical barriers. Current force sensors often suffer from drift, temperature sensitivity, and limited dynamic range, making precise force control difficult to achieve consistently. The challenge is amplified when dealing with objects of varying weights, surface textures, and material properties, as existing systems struggle to adapt force parameters dynamically based on object characteristics.
Control algorithm limitations represent another significant constraint. Traditional PID-based force controllers exhibit poor performance when dealing with the nonlinear dynamics inherent in grasping tasks. The complex interaction between contact forces, friction coefficients, and object geometry creates control challenges that conventional algorithms cannot adequately address. Additionally, most current systems lack sophisticated slip detection mechanisms, relying instead on predetermined force thresholds that may be suboptimal for different grasping scenarios.
Environmental uncertainty further complicates force control implementation. Variations in object positioning, surface conditions, and external disturbances require adaptive control strategies that current systems often cannot provide. The inability to predict and compensate for these variables leads to conservative force application strategies that prioritize reliability over efficiency.
One primary limitation stems from inadequate real-time force feedback mechanisms. Many existing robotic systems lack sufficient tactile sensing capabilities or experience delays in force measurement and processing. This results in reactive rather than predictive force control, where robots apply excessive initial forces as a safety margin against potential slippage. The absence of distributed tactile sensing across gripper surfaces further compounds this issue, limiting the system's ability to detect localized pressure points and force distribution patterns.
Sensor integration and calibration present additional technical barriers. Current force sensors often suffer from drift, temperature sensitivity, and limited dynamic range, making precise force control difficult to achieve consistently. The challenge is amplified when dealing with objects of varying weights, surface textures, and material properties, as existing systems struggle to adapt force parameters dynamically based on object characteristics.
Control algorithm limitations represent another significant constraint. Traditional PID-based force controllers exhibit poor performance when dealing with the nonlinear dynamics inherent in grasping tasks. The complex interaction between contact forces, friction coefficients, and object geometry creates control challenges that conventional algorithms cannot adequately address. Additionally, most current systems lack sophisticated slip detection mechanisms, relying instead on predetermined force thresholds that may be suboptimal for different grasping scenarios.
Environmental uncertainty further complicates force control implementation. Variations in object positioning, surface conditions, and external disturbances require adaptive control strategies that current systems often cannot provide. The inability to predict and compensate for these variables leads to conservative force application strategies that prioritize reliability over efficiency.
Existing Force Minimization Solutions in Robotic Grasping
01 Force sensing and feedback mechanisms in robotic grippers
Implementation of force sensors and feedback systems in robotic grippers to monitor and control the grasping force applied to objects. These mechanisms enable real-time measurement of contact forces and provide feedback to the control system to adjust grip strength accordingly. The sensors can be integrated into gripper fingers or contact surfaces to detect normal and tangential forces during grasping operations.- Force sensing and feedback mechanisms in robotic grippers: Advanced force sensing systems are integrated into robotic grippers to provide real-time feedback on grasp force. These mechanisms utilize various sensor technologies to detect and measure the applied force during grasping operations, enabling precise control and preventing damage to delicate objects. The feedback systems allow robots to adjust their grip strength dynamically based on the sensed force data.
- Adaptive grasp force control algorithms: Sophisticated control algorithms are employed to automatically adjust grasp force based on object properties and task requirements. These algorithms process sensor data and environmental factors to determine optimal force levels, ensuring secure grasping while minimizing the risk of object damage. The systems can learn and adapt to different materials and shapes through machine learning techniques.
- Multi-finger gripper force distribution systems: Advanced multi-finger robotic grippers incorporate force distribution mechanisms that coordinate the application of force across multiple contact points. These systems ensure balanced and stable grasping by managing individual finger forces and their coordination. The technology enables complex manipulation tasks and improves grasp stability for irregularly shaped objects.
- Pneumatic and hydraulic force actuation systems: Pneumatic and hydraulic actuation systems provide controlled force generation in robotic grippers through pressurized fluid mechanisms. These systems offer high force-to-weight ratios and smooth force modulation capabilities. The technology enables precise force control through pressure regulation and provides robust performance in industrial applications requiring variable grip strength.
- Compliant and soft robotic grasping mechanisms: Compliant grasping mechanisms utilize soft materials and flexible structures to provide inherent force limitation and adaptive conforming to object shapes. These systems naturally distribute forces over larger contact areas, reducing stress concentrations and enabling safe interaction with fragile objects. The compliant nature allows for passive adaptation to object geometry while maintaining controlled grasp forces.
02 Adaptive grip force control algorithms
Development of control algorithms that automatically adjust grasping force based on object properties and task requirements. These algorithms utilize machine learning techniques and adaptive control methods to optimize grip force for different materials, shapes, and weights. The systems can learn from previous grasping experiences to improve force application strategies and prevent object damage or slippage.Expand Specific Solutions03 Multi-fingered robotic hands with distributed force control
Design and implementation of multi-fingered robotic hands capable of distributed force control across multiple contact points. These systems coordinate force application among different fingers to achieve stable and secure grasping of complex objects. The technology includes individual finger force control and coordination algorithms to maintain optimal grip distribution.Expand Specific Solutions04 Compliant and variable stiffness gripper mechanisms
Development of gripper mechanisms with variable compliance and stiffness properties to adapt grasping force based on object characteristics. These systems incorporate flexible materials, springs, or pneumatic actuators to provide controlled compliance during grasping operations. The variable stiffness allows for gentle handling of fragile objects while maintaining secure grip for heavier items.Expand Specific Solutions05 Force optimization for object manipulation and handling
Techniques for optimizing grasping force during object manipulation tasks such as picking, placing, and transferring operations. These methods consider factors like object weight, surface friction, acceleration forces, and safety margins to determine optimal grip force levels. The optimization ensures reliable object handling while minimizing energy consumption and mechanical stress on both the gripper and the grasped object.Expand Specific Solutions
Key Players in Robotic Manipulation and Force Control
The robotic grasping force reduction technology operates within a rapidly evolving competitive landscape characterized by significant market growth and diverse technological maturity levels across key players. The industry is transitioning from traditional heavy industrial automation to sophisticated, force-sensitive robotic systems, driven by increasing demand for collaborative robots and precision manufacturing applications. Major established players like FANUC Corp., YASKAWA Electric Corp., and Kawasaki Heavy Industries represent mature industrial robotics capabilities, while companies such as Universal Robots (Teradyne Robotics) and FRANKA EMIKA GmbH are pioneering advanced force-controlled collaborative systems. Technology giants including Sony Group Corp., Panasonic Holdings Corp., and Canon Inc. contribute essential sensing and control components, while automotive leaders like Toyota Motor Corp. and Honda Motor Co. drive application-specific innovations. The market demonstrates varying technological readiness, with some companies offering commercially deployed force-adaptive solutions while others remain in research phases, creating opportunities for breakthrough innovations in tactile sensing, adaptive control algorithms, and intelligent grasping mechanisms.
YASKAWA Electric Corp.
Technical Solution: YASKAWA implements advanced servo control technology with integrated force sensing capabilities to achieve optimal grasp force reduction. Their robotic systems utilize proprietary motion control algorithms that incorporate force feedback loops to minimize grip pressure while ensuring secure object handling. The technology features adaptive impedance control that adjusts robot compliance based on contact forces, enabling gentle manipulation of fragile objects. Their servo drives include built-in force estimation algorithms that continuously monitor and optimize grasp forces during manipulation tasks, reducing unnecessary pressure while maintaining stable grasping through intelligent force distribution.
Strengths: Robust servo control technology and proven industrial reliability. Weaknesses: Limited advanced AI integration compared to newer competitors.
Honda Motor Co., Ltd.
Technical Solution: Honda develops humanoid and industrial robots with advanced tactile sensing systems that enable precise force control for stable grasping with minimal applied force. Their ASIMO-derived technology incorporates multi-fingered hands with distributed tactile sensors that provide detailed contact force information. The system uses neural network-based control algorithms to learn optimal grasping strategies that minimize force while maintaining manipulation stability. Honda's approach includes biomimetic control strategies inspired by human grasping behavior, implementing adaptive grip control that continuously adjusts force based on object properties and environmental feedback through sophisticated sensor fusion and machine learning algorithms.
Strengths: Advanced humanoid robotics expertise and biomimetic control approaches. Weaknesses: High development costs and complex system architecture requirements.
Core Innovations in Adaptive Grasp Force Technologies
Limiting grip force and maintaining minimum jaw opening force in position control mode, and controlling grip force when transitioning between position control mode and force mode
PatentActiveJP2023544318A
Innovation
- A feedback control system is implemented to limit the grip force in position mode, maintain a minimum jaw opening force, and smooth transitions between modes by using a debouncing strategy and feedback loops to adjust grip force based on desired and measured angles and forces.




Patterned and instrumented directional adhesives for enhanced gripping with industrial manipulators
PatentActiveUS20190143532A1
Innovation
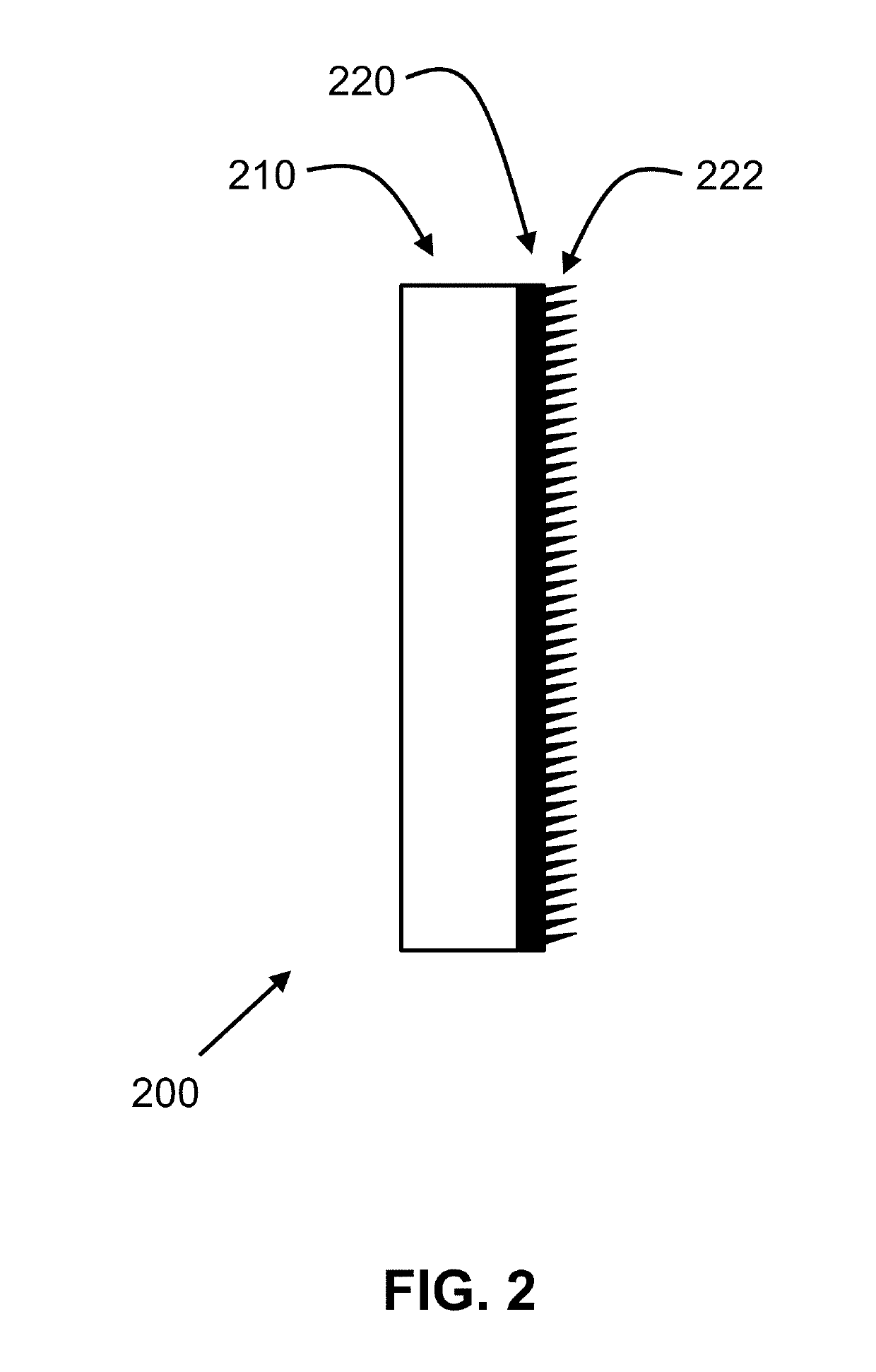
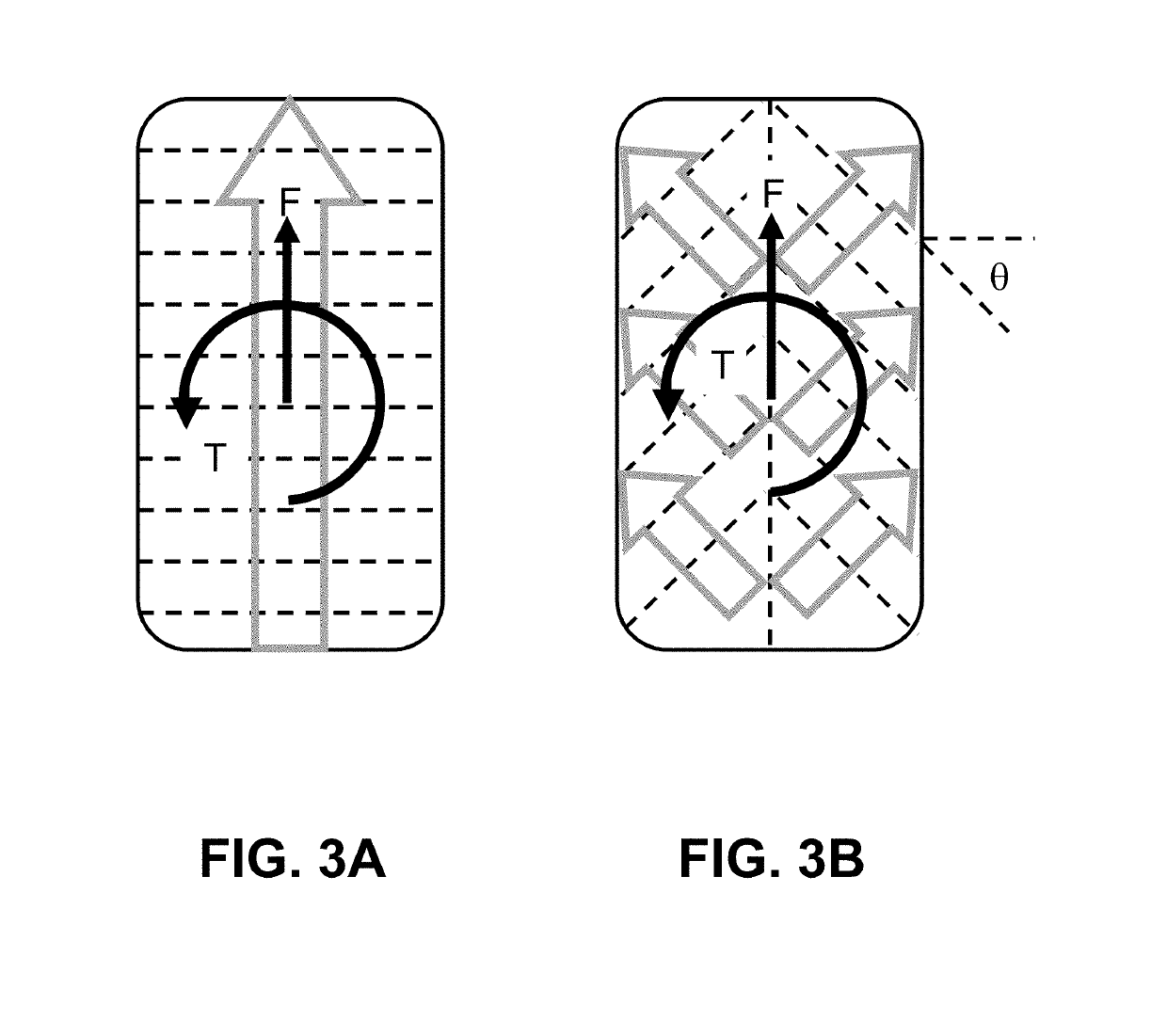
- Integration of gecko-inspired directional dry adhesives with a tactile sensor into a gripper pad, featuring a chevron pattern of adhesive wedges and a sensor array to measure contact pressure, allowing for precise control of forces and moments without residual adhesion, suitable for retrofitting existing grippers.
Safety Standards for Human-Robot Interaction Systems
The development of safety standards for human-robot interaction systems in the context of reduced grasp force robotics represents a critical regulatory frontier. Current international standards such as ISO 10218 and ISO/TS 15066 provide foundational frameworks for collaborative robotics, but these standards require significant adaptation to address the unique challenges posed by force-optimized grasping systems. The existing safety paradigms primarily focus on collision avoidance and force limitation during human-robot contact, yet they inadequately address the nuanced safety considerations inherent in systems that deliberately operate with minimal grasping forces.
The emergence of adaptive force control technologies necessitates new safety classification systems that distinguish between intentional low-force operations and potentially hazardous force reduction scenarios. Traditional safety standards rely heavily on predetermined force thresholds and emergency stop mechanisms, which may prove incompatible with systems designed to continuously modulate grasping forces based on object properties and environmental conditions. This fundamental mismatch creates regulatory gaps that could impede the deployment of advanced grasping technologies in collaborative environments.
Risk assessment methodologies for reduced-force grasping systems must incorporate probabilistic failure analysis that accounts for the increased likelihood of object slippage and subsequent projectile hazards. Unlike conventional robotic systems where grip failure typically results in dropped objects, force-optimized systems may experience gradual grip degradation that could launch objects unpredictably. Safety standards must therefore establish comprehensive hazard zones and implement real-time monitoring protocols that can detect incipient grip failures before they pose risks to human operators.
Certification processes for these systems require novel testing protocols that validate both the reliability of force reduction algorithms and the effectiveness of fail-safe mechanisms under various operational scenarios. The standards must address the integration of multiple sensor modalities, including tactile feedback systems, vision-based monitoring, and predictive analytics platforms that collectively ensure safe operation while maintaining the benefits of optimized grasping forces.
The regulatory framework must also establish clear guidelines for human operator training and system interaction protocols, ensuring that personnel understand the behavioral characteristics of force-optimized grasping systems and can respond appropriately to both normal operations and emergency situations involving potential grip failures.
The emergence of adaptive force control technologies necessitates new safety classification systems that distinguish between intentional low-force operations and potentially hazardous force reduction scenarios. Traditional safety standards rely heavily on predetermined force thresholds and emergency stop mechanisms, which may prove incompatible with systems designed to continuously modulate grasping forces based on object properties and environmental conditions. This fundamental mismatch creates regulatory gaps that could impede the deployment of advanced grasping technologies in collaborative environments.
Risk assessment methodologies for reduced-force grasping systems must incorporate probabilistic failure analysis that accounts for the increased likelihood of object slippage and subsequent projectile hazards. Unlike conventional robotic systems where grip failure typically results in dropped objects, force-optimized systems may experience gradual grip degradation that could launch objects unpredictably. Safety standards must therefore establish comprehensive hazard zones and implement real-time monitoring protocols that can detect incipient grip failures before they pose risks to human operators.
Certification processes for these systems require novel testing protocols that validate both the reliability of force reduction algorithms and the effectiveness of fail-safe mechanisms under various operational scenarios. The standards must address the integration of multiple sensor modalities, including tactile feedback systems, vision-based monitoring, and predictive analytics platforms that collectively ensure safe operation while maintaining the benefits of optimized grasping forces.
The regulatory framework must also establish clear guidelines for human operator training and system interaction protocols, ensuring that personnel understand the behavioral characteristics of force-optimized grasping systems and can respond appropriately to both normal operations and emergency situations involving potential grip failures.
Tactile Sensing Integration for Optimal Force Control
Tactile sensing integration represents a paradigm shift in robotic grasping control, enabling robots to achieve optimal force regulation through real-time feedback mechanisms. This approach fundamentally addresses the challenge of maintaining grasp stability while minimizing applied forces by incorporating sophisticated sensory feedback loops that continuously monitor contact conditions and adjust grip parameters accordingly.
The integration of tactile sensors into robotic grippers provides multi-dimensional force and pressure data that enables precise control algorithms to determine the minimum force required for stable object manipulation. Advanced tactile sensing systems utilize arrays of pressure-sensitive elements, force/torque sensors, and slip detection mechanisms to create comprehensive feedback networks that inform force control decisions in real-time.
Modern tactile sensing solutions employ various sensing modalities including capacitive, resistive, and optical technologies to capture detailed contact information. These sensors can detect not only normal forces but also shear forces and incipient slip conditions, providing critical data for force optimization algorithms. The integration of multiple sensing modalities creates redundant feedback systems that enhance reliability and accuracy in force control applications.
Optimal force control algorithms leverage tactile feedback to implement adaptive grasping strategies that continuously adjust grip forces based on object properties and environmental conditions. Machine learning approaches, particularly reinforcement learning and neural network-based controllers, have shown significant promise in developing intelligent force control systems that can learn optimal grasping parameters from tactile feedback data.
The implementation of tactile sensing integration faces several technical challenges including sensor calibration, signal processing latency, and integration complexity with existing robotic systems. However, recent advances in sensor miniaturization, wireless communication, and edge computing have significantly improved the feasibility of deploying comprehensive tactile sensing systems in practical robotic applications.
Future developments in tactile sensing integration focus on developing more sophisticated sensor fusion algorithms, improving sensor durability and sensitivity, and creating standardized interfaces for seamless integration with various robotic platforms. These advancements promise to enable more refined force control capabilities that can adapt to diverse grasping scenarios while maintaining optimal performance.
The integration of tactile sensors into robotic grippers provides multi-dimensional force and pressure data that enables precise control algorithms to determine the minimum force required for stable object manipulation. Advanced tactile sensing systems utilize arrays of pressure-sensitive elements, force/torque sensors, and slip detection mechanisms to create comprehensive feedback networks that inform force control decisions in real-time.
Modern tactile sensing solutions employ various sensing modalities including capacitive, resistive, and optical technologies to capture detailed contact information. These sensors can detect not only normal forces but also shear forces and incipient slip conditions, providing critical data for force optimization algorithms. The integration of multiple sensing modalities creates redundant feedback systems that enhance reliability and accuracy in force control applications.
Optimal force control algorithms leverage tactile feedback to implement adaptive grasping strategies that continuously adjust grip forces based on object properties and environmental conditions. Machine learning approaches, particularly reinforcement learning and neural network-based controllers, have shown significant promise in developing intelligent force control systems that can learn optimal grasping parameters from tactile feedback data.
The implementation of tactile sensing integration faces several technical challenges including sensor calibration, signal processing latency, and integration complexity with existing robotic systems. However, recent advances in sensor miniaturization, wireless communication, and edge computing have significantly improved the feasibility of deploying comprehensive tactile sensing systems in practical robotic applications.
Future developments in tactile sensing integration focus on developing more sophisticated sensor fusion algorithms, improving sensor durability and sensitivity, and creating standardized interfaces for seamless integration with various robotic platforms. These advancements promise to enable more refined force control capabilities that can adapt to diverse grasping scenarios while maintaining optimal performance.
Unlock deeper insights with PatSnap Eureka Quick Research — get a full tech report to explore trends and direct your research. Try now!
Generate Your Research Report Instantly with AI Agent
Supercharge your innovation with PatSnap Eureka AI Agent Platform!