

Optimizing Robot Cable Harness Wire Gauges for Current Load Specifications
MAY 27, 20269 MIN READ
Generate Your Research Report Instantly with AI Agent
PatSnap Eureka helps you evaluate technical feasibility & market potential.
Robot Cable Harness Wire Gauge Optimization Background and Goals
Robot cable harness systems have evolved significantly since the early days of industrial automation, transitioning from simple point-to-point wiring solutions to sophisticated multi-conductor assemblies that support complex robotic operations. The historical development of robotic cabling began in the 1960s with basic industrial robots requiring minimal electrical connections, primarily for motor control and basic sensing. As robotics technology advanced through the 1980s and 1990s, the integration of more sophisticated sensors, actuators, and communication systems necessitated increasingly complex cable harness designs.
The evolution of wire gauge optimization has been driven by the dual demands of miniaturization and performance enhancement. Early robotic systems often employed oversized conductors as a safety margin, leading to unnecessarily bulky and expensive cable assemblies. The introduction of precise current load calculations and thermal modeling in the 2000s enabled engineers to optimize wire gauges more effectively, balancing electrical performance with mechanical flexibility and cost considerations.
Contemporary robotic applications span diverse industries including automotive manufacturing, medical devices, aerospace, and service robotics, each presenting unique electrical load requirements. Modern robots incorporate high-power servo motors, precision sensors, vision systems, and advanced control electronics, creating complex current load profiles that vary significantly across different operational modes and duty cycles.
The primary technical objective of wire gauge optimization is to ensure adequate current-carrying capacity while minimizing conductor cross-sectional area, thereby reducing cable weight, diameter, and material costs. This optimization must account for continuous current ratings, peak transient loads, voltage drop limitations, and thermal dissipation characteristics within the constrained environment of robotic cable management systems.
Current industry trends emphasize the development of adaptive cable harness designs that can accommodate varying power requirements across different robot configurations and applications. The integration of smart materials and condition monitoring capabilities represents an emerging frontier, enabling real-time optimization of electrical performance based on actual operating conditions rather than conservative design assumptions.
The ultimate goal encompasses achieving optimal electrical performance, mechanical reliability, and cost-effectiveness while maintaining compliance with international safety standards and electromagnetic compatibility requirements. This multidisciplinary challenge requires sophisticated modeling approaches that integrate electrical engineering principles with mechanical design constraints and manufacturing considerations.
The evolution of wire gauge optimization has been driven by the dual demands of miniaturization and performance enhancement. Early robotic systems often employed oversized conductors as a safety margin, leading to unnecessarily bulky and expensive cable assemblies. The introduction of precise current load calculations and thermal modeling in the 2000s enabled engineers to optimize wire gauges more effectively, balancing electrical performance with mechanical flexibility and cost considerations.
Contemporary robotic applications span diverse industries including automotive manufacturing, medical devices, aerospace, and service robotics, each presenting unique electrical load requirements. Modern robots incorporate high-power servo motors, precision sensors, vision systems, and advanced control electronics, creating complex current load profiles that vary significantly across different operational modes and duty cycles.
The primary technical objective of wire gauge optimization is to ensure adequate current-carrying capacity while minimizing conductor cross-sectional area, thereby reducing cable weight, diameter, and material costs. This optimization must account for continuous current ratings, peak transient loads, voltage drop limitations, and thermal dissipation characteristics within the constrained environment of robotic cable management systems.
Current industry trends emphasize the development of adaptive cable harness designs that can accommodate varying power requirements across different robot configurations and applications. The integration of smart materials and condition monitoring capabilities represents an emerging frontier, enabling real-time optimization of electrical performance based on actual operating conditions rather than conservative design assumptions.
The ultimate goal encompasses achieving optimal electrical performance, mechanical reliability, and cost-effectiveness while maintaining compliance with international safety standards and electromagnetic compatibility requirements. This multidisciplinary challenge requires sophisticated modeling approaches that integrate electrical engineering principles with mechanical design constraints and manufacturing considerations.
Market Demand for Optimized Robot Cable Solutions
The global robotics market is experiencing unprecedented growth, driving substantial demand for optimized cable harness solutions that can meet increasingly stringent current load specifications. Industrial automation sectors, including automotive manufacturing, electronics assembly, and logistics, are rapidly adopting robotic systems that require precise power delivery and signal transmission capabilities. This expansion has created a critical need for cable harnesses with optimized wire gauges that can handle varying current loads while maintaining operational efficiency and safety standards.
Manufacturing industries are particularly focused on robotic applications that demand high-precision cable solutions. Collaborative robots in assembly lines require cable harnesses capable of supporting multiple current specifications simultaneously, from low-power sensor signals to high-current motor drives. The automotive sector represents a significant market segment, where robotic welding, painting, and assembly operations necessitate cable systems that can withstand harsh environmental conditions while delivering consistent electrical performance across different current load requirements.
The medical robotics sector presents another growing market opportunity for optimized cable solutions. Surgical robots and rehabilitation devices require extremely reliable cable harnesses with precisely calculated wire gauges to ensure patient safety and operational accuracy. These applications demand cable systems that can handle both power transmission and sensitive data communication without electromagnetic interference, creating specific requirements for wire gauge optimization based on current load analysis.
Emerging markets in service robotics, including cleaning robots, delivery systems, and inspection drones, are driving demand for lightweight yet robust cable solutions. These applications require cable harnesses with optimized wire gauges that balance current-carrying capacity with weight constraints and flexibility requirements. The miniaturization trend in robotics further emphasizes the need for precise wire gauge selection to maximize current handling capability within compact form factors.
Supply chain considerations are increasingly influencing market demand for standardized yet optimized cable solutions. Manufacturers seek cable harness designs that can accommodate multiple robot configurations while maintaining cost-effectiveness through economies of scale. This trend is pushing the development of modular cable systems with standardized wire gauge specifications that can be adapted to various current load requirements across different robotic platforms.
Manufacturing industries are particularly focused on robotic applications that demand high-precision cable solutions. Collaborative robots in assembly lines require cable harnesses capable of supporting multiple current specifications simultaneously, from low-power sensor signals to high-current motor drives. The automotive sector represents a significant market segment, where robotic welding, painting, and assembly operations necessitate cable systems that can withstand harsh environmental conditions while delivering consistent electrical performance across different current load requirements.
The medical robotics sector presents another growing market opportunity for optimized cable solutions. Surgical robots and rehabilitation devices require extremely reliable cable harnesses with precisely calculated wire gauges to ensure patient safety and operational accuracy. These applications demand cable systems that can handle both power transmission and sensitive data communication without electromagnetic interference, creating specific requirements for wire gauge optimization based on current load analysis.
Emerging markets in service robotics, including cleaning robots, delivery systems, and inspection drones, are driving demand for lightweight yet robust cable solutions. These applications require cable harnesses with optimized wire gauges that balance current-carrying capacity with weight constraints and flexibility requirements. The miniaturization trend in robotics further emphasizes the need for precise wire gauge selection to maximize current handling capability within compact form factors.
Supply chain considerations are increasingly influencing market demand for standardized yet optimized cable solutions. Manufacturers seek cable harness designs that can accommodate multiple robot configurations while maintaining cost-effectiveness through economies of scale. This trend is pushing the development of modular cable systems with standardized wire gauge specifications that can be adapted to various current load requirements across different robotic platforms.
Current Wire Gauge Selection Challenges in Robotics
Wire gauge selection in robotic systems presents a complex optimization challenge that extends far beyond traditional electrical engineering practices. Unlike static installations, robotic applications demand cables that can withstand continuous flexing, torsional stress, and dynamic loading while maintaining precise current-carrying capabilities. The selection process becomes particularly challenging when considering the diverse power requirements across different robotic subsystems, from high-torque servo motors requiring substantial current to sensitive sensor circuits operating at milliamp levels.
Current industry practices often rely on oversized conductors as a safety margin, leading to increased cable bulk, weight, and cost. This conservative approach creates cascading problems in robotic design, where cable management becomes increasingly difficult as harnesses grow larger. The additional weight affects robot dynamics, potentially reducing payload capacity and increasing energy consumption. Moreover, oversized cables can impede joint movement and create interference issues in compact robotic architectures.
The challenge intensifies when considering the thermal characteristics of bundled cables within robotic harnesses. Traditional ampacity calculations assume ideal conditions that rarely exist in robotic applications, where cables are tightly bundled, routed through confined spaces, and subjected to varying ambient temperatures. Heat generation from adjacent power conductors can significantly impact the current-carrying capacity of neighboring wires, creating thermal interdependencies that are difficult to predict using conventional methods.
Dynamic loading presents another significant challenge in wire gauge optimization. Robotic systems experience varying current demands based on operational modes, with peak currents during acceleration phases potentially exceeding steady-state requirements by several orders of magnitude. This variability complicates the selection process, as designers must balance between accommodating peak loads and optimizing for typical operating conditions.
Manufacturing and maintenance considerations further complicate wire gauge selection. Smaller gauge wires, while electrically adequate, may be more susceptible to fatigue failure in high-flex applications. The trade-off between electrical optimization and mechanical durability requires careful consideration of expected duty cycles, bend radii, and replacement intervals. Additionally, standardization pressures within organizations often limit the variety of available wire gauges, forcing compromises that may not align with optimal electrical design.
Regulatory compliance adds another layer of complexity, as safety standards for robotic systems continue to evolve. Wire gauge selections must not only meet current electrical codes but also anticipate future regulatory requirements, particularly in collaborative robotics where human safety considerations are paramount.
Current industry practices often rely on oversized conductors as a safety margin, leading to increased cable bulk, weight, and cost. This conservative approach creates cascading problems in robotic design, where cable management becomes increasingly difficult as harnesses grow larger. The additional weight affects robot dynamics, potentially reducing payload capacity and increasing energy consumption. Moreover, oversized cables can impede joint movement and create interference issues in compact robotic architectures.
The challenge intensifies when considering the thermal characteristics of bundled cables within robotic harnesses. Traditional ampacity calculations assume ideal conditions that rarely exist in robotic applications, where cables are tightly bundled, routed through confined spaces, and subjected to varying ambient temperatures. Heat generation from adjacent power conductors can significantly impact the current-carrying capacity of neighboring wires, creating thermal interdependencies that are difficult to predict using conventional methods.
Dynamic loading presents another significant challenge in wire gauge optimization. Robotic systems experience varying current demands based on operational modes, with peak currents during acceleration phases potentially exceeding steady-state requirements by several orders of magnitude. This variability complicates the selection process, as designers must balance between accommodating peak loads and optimizing for typical operating conditions.
Manufacturing and maintenance considerations further complicate wire gauge selection. Smaller gauge wires, while electrically adequate, may be more susceptible to fatigue failure in high-flex applications. The trade-off between electrical optimization and mechanical durability requires careful consideration of expected duty cycles, bend radii, and replacement intervals. Additionally, standardization pressures within organizations often limit the variety of available wire gauges, forcing compromises that may not align with optimal electrical design.
Regulatory compliance adds another layer of complexity, as safety standards for robotic systems continue to evolve. Wire gauge selections must not only meet current electrical codes but also anticipate future regulatory requirements, particularly in collaborative robotics where human safety considerations are paramount.
Existing Wire Gauge Optimization Methods
01 Wire gauge optimization for robotic applications
Optimization of wire gauge selection in robotic cable harnesses involves determining the appropriate conductor cross-sectional area to handle current loads while minimizing weight and maximizing flexibility. The selection considers factors such as current carrying capacity, voltage drop, and mechanical stress during robotic movement. Proper gauge selection ensures reliable power transmission and signal integrity in dynamic robotic environments.- Wire gauge optimization for robotic applications: Optimization of wire gauge selection in robotic cable harnesses involves determining the appropriate conductor cross-sectional area to handle current loads while minimizing weight and maximizing flexibility. The selection considers factors such as current carrying capacity, voltage drop, and mechanical stress during robotic movement. Proper gauge selection ensures reliable power transmission and signal integrity in dynamic robotic environments.
- Cable harness design for robotic motion: Cable harness design specifically tailored for robotic applications focuses on creating flexible, durable wire assemblies that can withstand repeated bending, twisting, and stretching motions. The design incorporates specialized routing, bundling techniques, and protective materials to ensure longevity and prevent wire fatigue during continuous robotic operations.
- Multi-conductor cable configurations: Multi-conductor cable configurations in robotic systems involve the arrangement and organization of multiple wires with varying gauges within a single harness assembly. These configurations optimize space utilization while maintaining electrical isolation and reducing electromagnetic interference between different signal and power conductors used in robotic control systems.
- Connector integration and termination methods: Integration of connectors with appropriate wire gauges involves specialized termination techniques that ensure reliable electrical connections while maintaining the mechanical integrity of the cable harness. The methods include proper crimping, soldering, and strain relief techniques that accommodate the specific requirements of robotic applications and prevent connection failures during operation.
- Protective sheathing and insulation systems: Protective sheathing and insulation systems for robotic cable harnesses provide environmental protection and electrical isolation for wires of various gauges. These systems include specialized materials and construction methods that protect against abrasion, chemicals, temperature extremes, and mechanical damage while maintaining flexibility and allowing for proper heat dissipation from current-carrying conductors.
02 Cable harness design for robotic motion
Cable harness design specifically tailored for robotic applications focuses on creating flexible, durable wire assemblies that can withstand repeated bending, twisting, and extension cycles. The design incorporates strain relief mechanisms, proper bundling techniques, and protective sheathing to ensure longevity during continuous robotic operation. Special attention is given to bend radius requirements and fatigue resistance.Expand Specific Solutions03 Multi-conductor cable configurations
Multi-conductor cable configurations in robotic systems involve the arrangement and organization of multiple wires of varying gauges within a single harness assembly. These configurations optimize space utilization while maintaining electrical isolation and reducing electromagnetic interference. The design considers power distribution, signal transmission, and control circuits within unified cable structures.Expand Specific Solutions04 Connector integration and termination methods
Connector integration involves the proper termination of various wire gauges to appropriate connector systems in robotic cable harnesses. This includes crimping techniques, soldering methods, and mechanical connections that ensure reliable electrical contact while accommodating different wire sizes. The integration considers environmental sealing, vibration resistance, and ease of maintenance in robotic applications.Expand Specific Solutions05 Protective sheathing and cable management
Protective sheathing systems provide mechanical protection and organization for robotic cable harnesses containing multiple wire gauges. These systems include flexible conduits, spiral wraps, and braided sleeves that protect against abrasion, chemical exposure, and mechanical damage. Cable management solutions ensure proper routing and support throughout the robotic system while maintaining flexibility and accessibility.Expand Specific Solutions
Key Players in Robot Cable and Wire Manufacturing
The robot cable harness wire gauge optimization market represents a mature, specialized segment within the broader industrial automation and robotics ecosystem. The industry has reached an advanced development stage, driven by increasing demand for precision robotics across automotive, aerospace, and manufacturing sectors. Market growth is fueled by the need for enhanced current load management and safety standards in robotic applications. Technology maturity varies significantly among key players: established automation giants like FANUC Corp., ABB Ltd., and KUKA Deutschland GmbH demonstrate high technical sophistication through decades of robotics expertise, while specialized wire harness manufacturers such as YAZAKI Corp., Sumitomo Wiring Systems Ltd., and AutoNetworks Technologies Ltd. bring deep materials engineering capabilities. Emerging players like UBTECH Robotics Corp. and newer Chinese manufacturers are rapidly advancing but still developing comprehensive solutions. The convergence of traditional electrical engineering with advanced robotics creates opportunities for innovation in smart cable management systems.
YAZAKI Corp.
Technical Solution: YAZAKI has developed advanced wire harness optimization systems that utilize proprietary algorithms to calculate optimal wire gauges based on current load specifications, voltage drop requirements, and thermal considerations. Their solution incorporates real-time monitoring capabilities and predictive analytics to ensure wire gauge selections meet both current and future load demands. The system features automated design validation tools that verify compliance with international safety standards while minimizing material costs and weight. Their technology includes specialized software for multi-branch harness analysis and considers factors such as ambient temperature, bundling effects, and derating factors to provide precise wire gauge recommendations for robotic applications.
Strengths: Industry-leading expertise in automotive wire harness systems with extensive validation experience. Weaknesses: Solutions may be over-engineered for simpler robotic applications, potentially increasing costs.
Sumitomo Electric Industries Ltd.
Technical Solution: Sumitomo Electric has developed comprehensive wire gauge optimization solutions that integrate advanced materials science with electrical engineering principles. Their approach utilizes high-performance copper alloys and specialized insulation materials to enable smaller wire gauges while maintaining current carrying capacity. The company's proprietary calculation methods account for dynamic loading conditions, electromagnetic interference, and mechanical stress factors specific to robotic movements. Their system includes thermal modeling capabilities that predict temperature rise under various operating conditions and provides recommendations for wire gauge selection that optimize both electrical performance and mechanical flexibility required in robotic cable harnesses.
Strengths: Advanced materials technology and strong R&D capabilities in wire and cable manufacturing. Weaknesses: Higher material costs compared to standard copper wire solutions.
Core Innovations in Current Load Wire Sizing
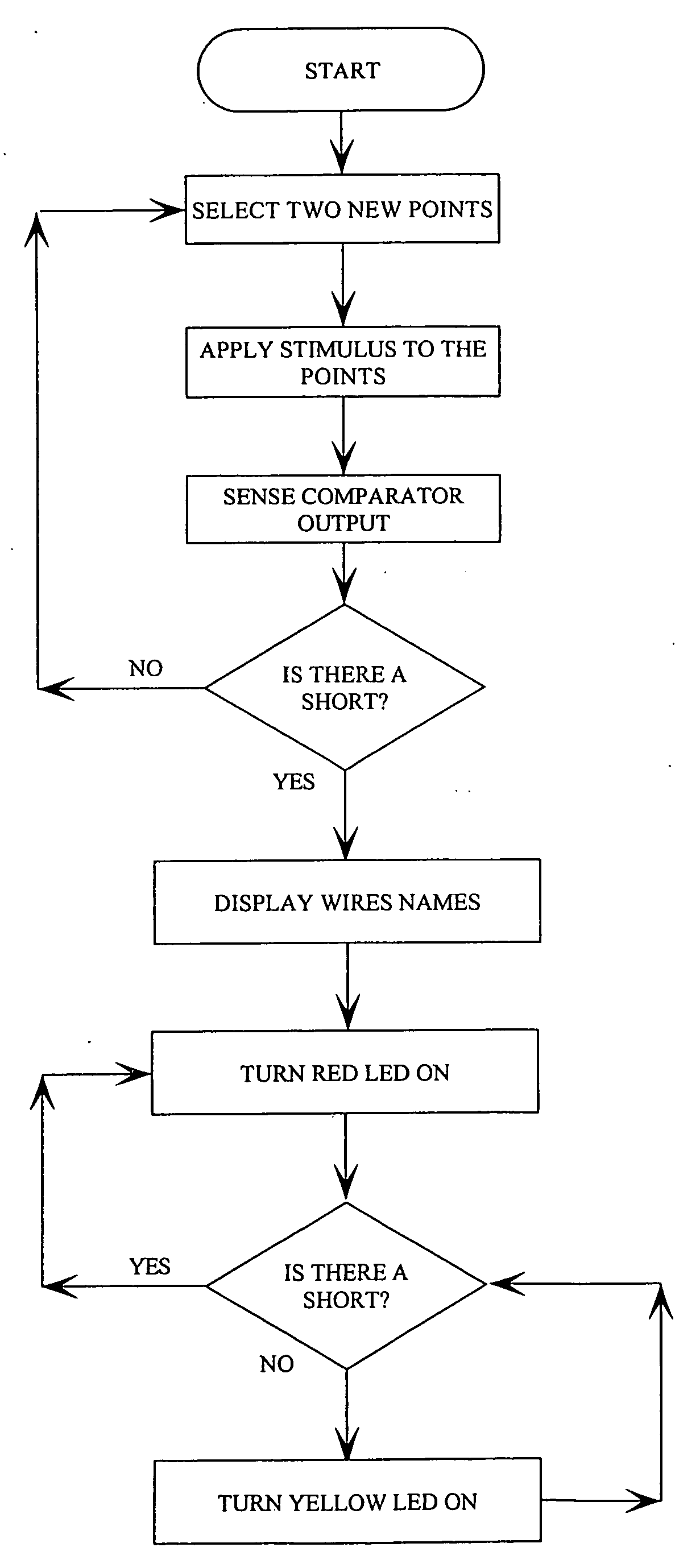
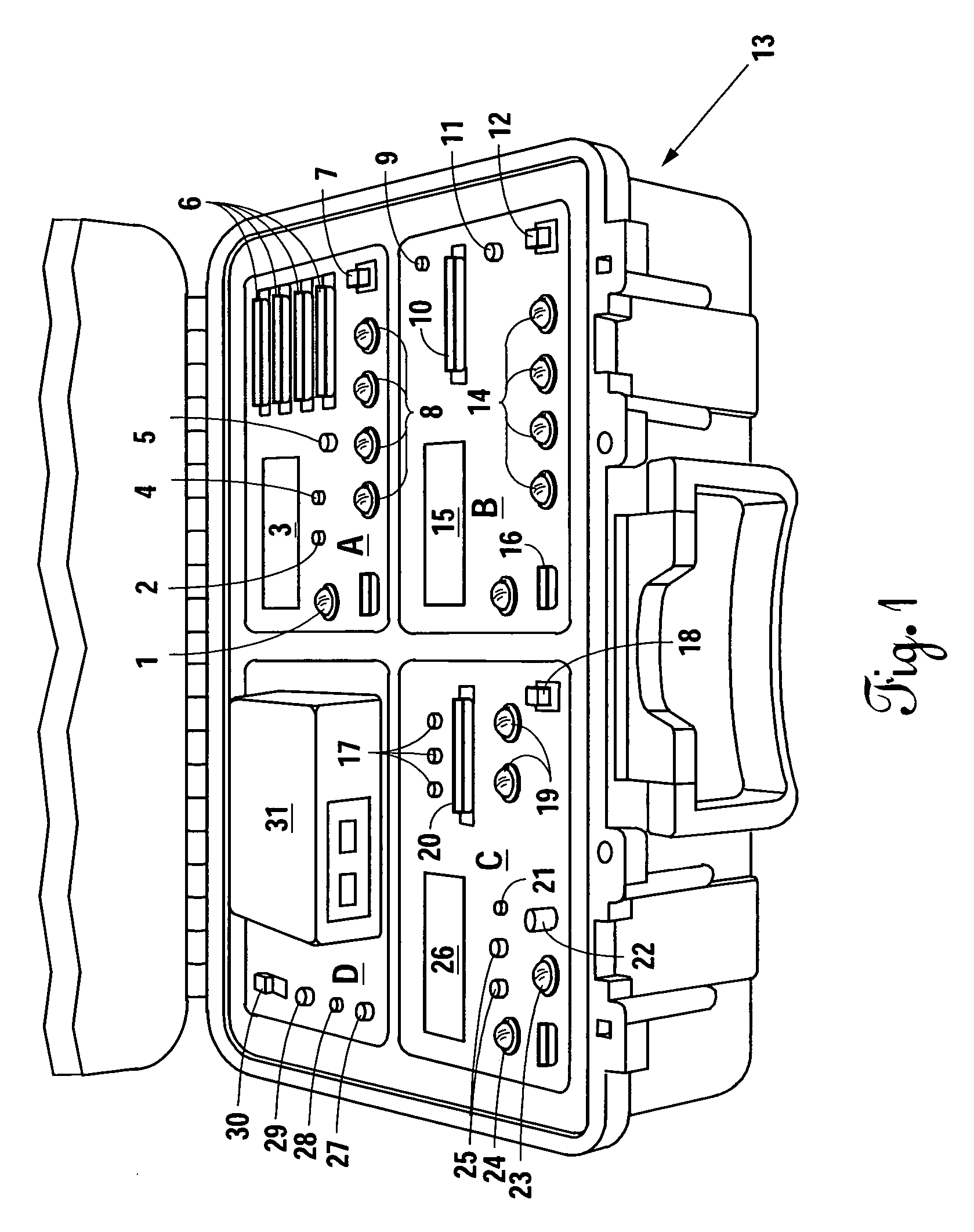
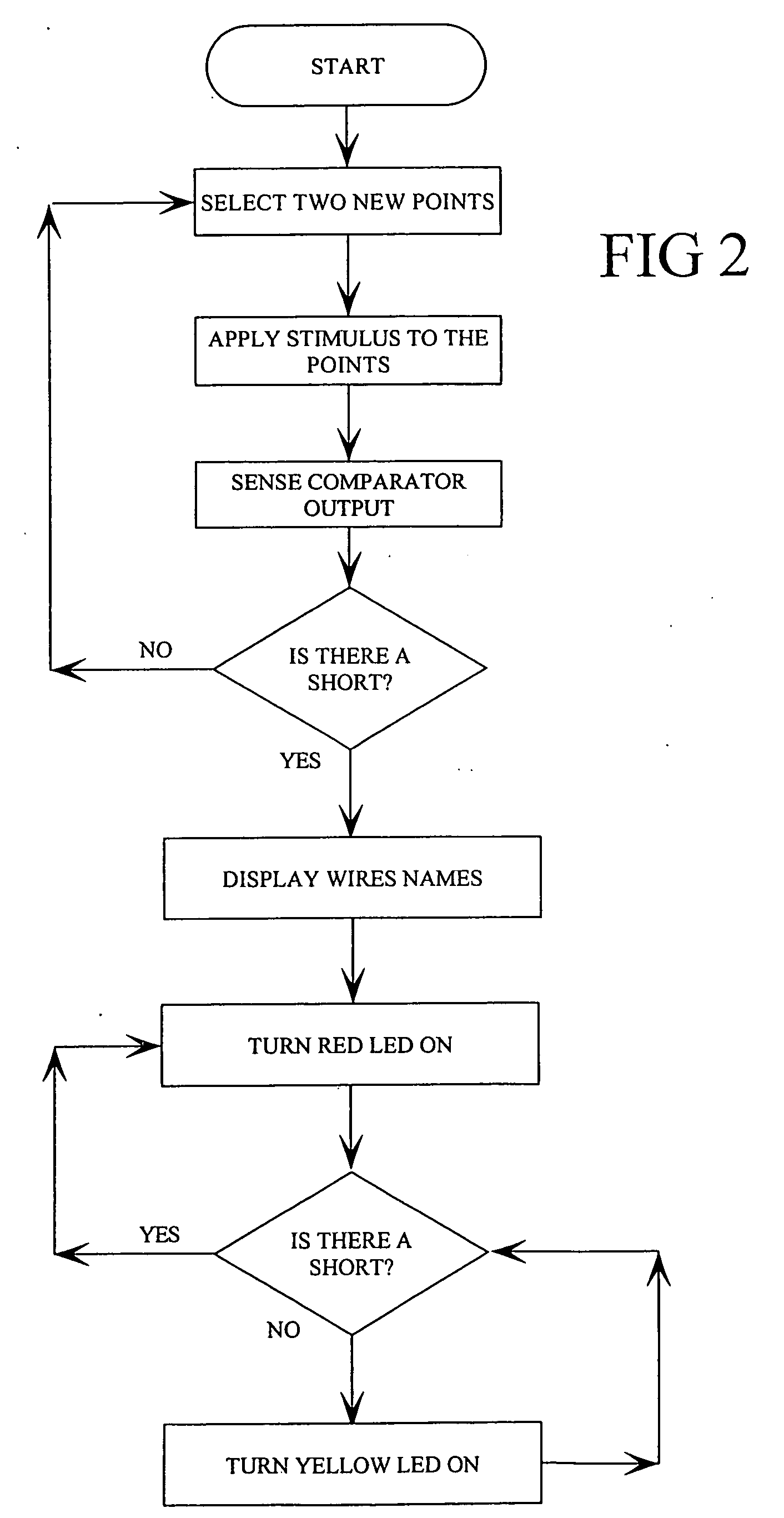
System for testing wiring characteristics
PatentInactiveUS20070001683A1
Innovation
- A portable, automated testing system using Time-Domain Reflectometer principles and expansion units for standard TDRs, which provides coaxial characteristics to multi-wire harnesses, allowing for simultaneous testing of multiple wires, locating faults, and assessing corrosion, with wireless communication for easy result dissemination.

Power harness and robot
PatentWO2022131231A1
Innovation
- A power harness using multiple small-diameter cables in parallel, connected by a carrier with a bendable chain shape, allows for efficient current transmission while reducing the overall cable diameter and bending radius, thereby minimizing space requirements and maintaining consistent cable lifespan.




Safety Standards for Robot Electrical Systems
Safety standards for robot electrical systems represent a critical framework governing the design, implementation, and operation of robotic platforms across industrial, commercial, and research applications. These standards establish mandatory requirements for electrical component selection, installation practices, and operational protocols to ensure personnel safety and equipment reliability. The primary regulatory bodies include the International Electrotechnical Commission (IEC), Institute of Electrical and Electronics Engineers (IEEE), and various national standards organizations that collectively define comprehensive safety protocols.
The IEC 60204-1 standard serves as the foundational document for electrical equipment safety in machinery applications, establishing requirements for electrical supply, conductors, protective devices, and control equipment. This standard mandates specific wire gauge calculations based on current-carrying capacity, ambient temperature conditions, and installation methods. For robotic systems, compliance requires detailed analysis of cable harness configurations to ensure adequate current handling while maintaining safety margins.
Functional safety standards, particularly IEC 61508 and its robotics-specific derivative ISO 10218, define systematic approaches to electrical system design that minimize risks of hazardous failures. These standards require comprehensive hazard analysis, risk assessment, and implementation of safety-related electrical control systems. Wire gauge optimization must consider not only normal operational currents but also fault conditions, emergency stop requirements, and fail-safe operational modes.
Electromagnetic compatibility (EMC) standards, including IEC 61000 series, establish requirements for electrical interference mitigation in robotic systems. Proper wire gauge selection directly impacts EMC performance through impedance matching, signal integrity, and noise reduction. Cable harness design must incorporate shielding, grounding, and separation requirements to meet conducted and radiated emission limits while maintaining immunity to external electromagnetic disturbances.
National electrical codes, such as the National Electrical Code (NEC) in the United States and similar regulations globally, provide jurisdiction-specific requirements for electrical installations. These codes establish minimum wire gauge requirements based on circuit protection, voltage drop limitations, and environmental conditions. Robotic applications often require derating factors for bundled conductors, elevated temperatures, and continuous duty cycles that exceed standard industrial equipment assumptions.
Certification processes for robotic electrical systems typically involve third-party testing laboratories that verify compliance with applicable safety standards. Documentation requirements include detailed electrical schematics, wire gauge calculations, thermal analysis, and safety system validation reports. Manufacturers must demonstrate that cable harness designs meet all relevant standards through comprehensive testing protocols that simulate operational and fault conditions.
The IEC 60204-1 standard serves as the foundational document for electrical equipment safety in machinery applications, establishing requirements for electrical supply, conductors, protective devices, and control equipment. This standard mandates specific wire gauge calculations based on current-carrying capacity, ambient temperature conditions, and installation methods. For robotic systems, compliance requires detailed analysis of cable harness configurations to ensure adequate current handling while maintaining safety margins.
Functional safety standards, particularly IEC 61508 and its robotics-specific derivative ISO 10218, define systematic approaches to electrical system design that minimize risks of hazardous failures. These standards require comprehensive hazard analysis, risk assessment, and implementation of safety-related electrical control systems. Wire gauge optimization must consider not only normal operational currents but also fault conditions, emergency stop requirements, and fail-safe operational modes.
Electromagnetic compatibility (EMC) standards, including IEC 61000 series, establish requirements for electrical interference mitigation in robotic systems. Proper wire gauge selection directly impacts EMC performance through impedance matching, signal integrity, and noise reduction. Cable harness design must incorporate shielding, grounding, and separation requirements to meet conducted and radiated emission limits while maintaining immunity to external electromagnetic disturbances.
National electrical codes, such as the National Electrical Code (NEC) in the United States and similar regulations globally, provide jurisdiction-specific requirements for electrical installations. These codes establish minimum wire gauge requirements based on circuit protection, voltage drop limitations, and environmental conditions. Robotic applications often require derating factors for bundled conductors, elevated temperatures, and continuous duty cycles that exceed standard industrial equipment assumptions.
Certification processes for robotic electrical systems typically involve third-party testing laboratories that verify compliance with applicable safety standards. Documentation requirements include detailed electrical schematics, wire gauge calculations, thermal analysis, and safety system validation reports. Manufacturers must demonstrate that cable harness designs meet all relevant standards through comprehensive testing protocols that simulate operational and fault conditions.
Thermal Management in High-Density Cable Routing
Thermal management in high-density cable routing represents a critical engineering challenge in robotic systems, where multiple cables carrying varying current loads are bundled together in confined spaces. The proximity of conductors creates complex thermal interactions that can significantly impact system performance, safety, and longevity. As cable density increases, heat dissipation becomes increasingly difficult, leading to elevated operating temperatures that can degrade insulation materials and reduce conductor efficiency.
The fundamental principle governing thermal behavior in cable harnesses involves heat generation through resistive losses, which is proportional to the square of the current and the resistance of the conductor. In high-density configurations, this heat generation is compounded by reduced airflow and limited heat dissipation pathways. The thermal coupling between adjacent cables creates hotspots that can exceed safe operating temperatures, particularly in the center of large bundles where heat extraction is most challenging.
Effective thermal management strategies must address both active heat generation and passive heat retention. Conductor sizing plays a crucial role, as larger gauge wires exhibit lower resistance and generate less heat per unit current. However, the trade-off between thermal performance and space constraints requires careful optimization. Advanced materials such as high-temperature insulation compounds and thermally conductive cable jackets can enhance heat dissipation while maintaining electrical isolation.
Routing topology significantly influences thermal performance in dense cable arrangements. Strategic cable placement, incorporating thermal breaks, and implementing forced air circulation can mitigate temperature buildup. Modern approaches include thermal modeling software that predicts temperature distributions and identifies optimal routing patterns. Additionally, dynamic thermal monitoring systems enable real-time temperature tracking and adaptive current limiting to prevent thermal overload conditions.
The integration of thermal management considerations into cable harness design requires comprehensive analysis of current profiles, ambient conditions, and mechanical constraints. This holistic approach ensures reliable operation while maximizing system performance within thermal limits.
The fundamental principle governing thermal behavior in cable harnesses involves heat generation through resistive losses, which is proportional to the square of the current and the resistance of the conductor. In high-density configurations, this heat generation is compounded by reduced airflow and limited heat dissipation pathways. The thermal coupling between adjacent cables creates hotspots that can exceed safe operating temperatures, particularly in the center of large bundles where heat extraction is most challenging.
Effective thermal management strategies must address both active heat generation and passive heat retention. Conductor sizing plays a crucial role, as larger gauge wires exhibit lower resistance and generate less heat per unit current. However, the trade-off between thermal performance and space constraints requires careful optimization. Advanced materials such as high-temperature insulation compounds and thermally conductive cable jackets can enhance heat dissipation while maintaining electrical isolation.
Routing topology significantly influences thermal performance in dense cable arrangements. Strategic cable placement, incorporating thermal breaks, and implementing forced air circulation can mitigate temperature buildup. Modern approaches include thermal modeling software that predicts temperature distributions and identifies optimal routing patterns. Additionally, dynamic thermal monitoring systems enable real-time temperature tracking and adaptive current limiting to prevent thermal overload conditions.
The integration of thermal management considerations into cable harness design requires comprehensive analysis of current profiles, ambient conditions, and mechanical constraints. This holistic approach ensures reliable operation while maximizing system performance within thermal limits.
Unlock deeper insights with PatSnap Eureka Quick Research — get a full tech report to explore trends and direct your research. Try now!
Generate Your Research Report Instantly with AI Agent
Supercharge your innovation with PatSnap Eureka AI Agent Platform!