

Optimizing Robotic End Effectors for Underwater Use Cases
MAY 25, 20269 MIN READ
Generate Your Research Report Instantly with AI Agent
Patsnap Eureka helps you evaluate technical feasibility & market potential.
Underwater Robotics End Effector Background and Objectives
Underwater robotics has emerged as a critical technology domain driven by the expanding needs of marine exploration, offshore energy operations, environmental monitoring, and deep-sea research. The evolution of underwater robotic systems began in the 1960s with simple remotely operated vehicles (ROVs) and has progressed to sophisticated autonomous underwater vehicles (AUVs) capable of complex manipulation tasks. This technological progression has been fundamentally limited by the challenges of operating in harsh underwater environments, where traditional robotic components face unprecedented stresses from pressure, corrosion, and fluid dynamics.
The development trajectory of underwater robotics has consistently highlighted end effectors as a critical bottleneck in system performance. Early underwater robots were primarily observational platforms, but modern applications demand sophisticated manipulation capabilities for tasks ranging from biological sampling to infrastructure maintenance. This shift has exposed the inadequacy of conventional robotic grippers and tools when adapted for underwater use, necessitating specialized design approaches that account for buoyancy effects, pressure differentials, and the unique physics of underwater manipulation.
Current market demands are driving unprecedented innovation in underwater end effector technology. The offshore oil and gas industry requires robust manipulation systems for pipeline maintenance and subsea equipment servicing. Marine biology research demands delicate sampling mechanisms that can handle fragile specimens without damage. Archaeological expeditions need precision tools for artifact recovery, while environmental monitoring applications require versatile sensors and collection devices. Each application presents distinct requirements for force control, dexterity, and environmental resistance.
The primary objective of optimizing robotic end effectors for underwater applications centers on developing manipulation systems that maintain terrestrial-level performance while operating under extreme underwater conditions. This involves addressing fundamental challenges including pressure compensation, corrosion resistance, and hydrodynamic efficiency. Key performance targets include achieving precise force control despite buoyancy effects, maintaining tactile feedback through thick protective barriers, and ensuring reliable operation at depths exceeding 6000 meters where pressures reach 600 atmospheres.
Secondary objectives encompass developing modular end effector architectures that can be rapidly reconfigured for different mission profiles, implementing advanced materials that resist biofouling and corrosion, and integrating intelligent control systems that compensate for the unique dynamics of underwater manipulation. The ultimate goal is creating end effector systems that expand the operational envelope of underwater robots, enabling new classes of missions previously impossible due to manipulation limitations.
The development trajectory of underwater robotics has consistently highlighted end effectors as a critical bottleneck in system performance. Early underwater robots were primarily observational platforms, but modern applications demand sophisticated manipulation capabilities for tasks ranging from biological sampling to infrastructure maintenance. This shift has exposed the inadequacy of conventional robotic grippers and tools when adapted for underwater use, necessitating specialized design approaches that account for buoyancy effects, pressure differentials, and the unique physics of underwater manipulation.
Current market demands are driving unprecedented innovation in underwater end effector technology. The offshore oil and gas industry requires robust manipulation systems for pipeline maintenance and subsea equipment servicing. Marine biology research demands delicate sampling mechanisms that can handle fragile specimens without damage. Archaeological expeditions need precision tools for artifact recovery, while environmental monitoring applications require versatile sensors and collection devices. Each application presents distinct requirements for force control, dexterity, and environmental resistance.
The primary objective of optimizing robotic end effectors for underwater applications centers on developing manipulation systems that maintain terrestrial-level performance while operating under extreme underwater conditions. This involves addressing fundamental challenges including pressure compensation, corrosion resistance, and hydrodynamic efficiency. Key performance targets include achieving precise force control despite buoyancy effects, maintaining tactile feedback through thick protective barriers, and ensuring reliable operation at depths exceeding 6000 meters where pressures reach 600 atmospheres.
Secondary objectives encompass developing modular end effector architectures that can be rapidly reconfigured for different mission profiles, implementing advanced materials that resist biofouling and corrosion, and integrating intelligent control systems that compensate for the unique dynamics of underwater manipulation. The ultimate goal is creating end effector systems that expand the operational envelope of underwater robots, enabling new classes of missions previously impossible due to manipulation limitations.
Market Demand for Underwater Robotic Manipulation Systems
The global underwater robotics market has experienced substantial growth driven by increasing demand across multiple sectors. Offshore oil and gas operations represent the largest market segment, requiring sophisticated manipulation systems for pipeline inspection, maintenance, and repair activities. These operations demand end effectors capable of handling heavy tools, performing precise welding tasks, and operating in extreme pressure environments at depths exceeding 3,000 meters.
Marine research and scientific exploration constitute another significant demand driver. Oceanographic institutions and research organizations require underwater manipulation systems for sample collection, equipment deployment, and archaeological excavation. The growing emphasis on deep-sea exploration and marine biodiversity studies has intensified the need for delicate manipulation capabilities that can handle fragile specimens without damage.
The aquaculture industry presents an emerging market opportunity with substantial growth potential. Fish farming operations increasingly rely on underwater robots for net cleaning, fish health monitoring, and feeding system maintenance. These applications require specialized end effectors designed for biological environments, emphasizing gentle handling and contamination prevention.
Defense and security applications drive demand for highly specialized underwater manipulation systems. Naval operations require robots capable of mine disposal, hull inspection, and underwater construction tasks. These applications demand robust end effectors with enhanced reliability and the ability to operate in contested environments.
Infrastructure maintenance represents a rapidly expanding market segment. Underwater inspection and repair of bridges, dams, and port facilities require manipulation systems capable of performing structural assessments and minor repairs. The aging infrastructure in developed nations has created sustained demand for cost-effective underwater maintenance solutions.
Environmental monitoring and cleanup operations have gained prominence following increased environmental awareness. Oil spill response, marine debris removal, and ecosystem restoration projects require specialized manipulation capabilities. These applications demand end effectors designed for environmental sensitivity and contamination control.
The commercial diving industry increasingly adopts robotic systems to reduce human risk exposure. Complex manipulation tasks previously performed by human divers are transitioning to robotic solutions, driving demand for versatile end effector systems capable of replicating human dexterity underwater.
Market growth is further accelerated by technological advancements in underwater communication systems, improved battery technologies, and enhanced pressure-resistant materials. These developments have expanded the operational envelope for underwater robotic systems, creating new application opportunities and driving sustained market expansion across diverse industrial sectors.
Marine research and scientific exploration constitute another significant demand driver. Oceanographic institutions and research organizations require underwater manipulation systems for sample collection, equipment deployment, and archaeological excavation. The growing emphasis on deep-sea exploration and marine biodiversity studies has intensified the need for delicate manipulation capabilities that can handle fragile specimens without damage.
The aquaculture industry presents an emerging market opportunity with substantial growth potential. Fish farming operations increasingly rely on underwater robots for net cleaning, fish health monitoring, and feeding system maintenance. These applications require specialized end effectors designed for biological environments, emphasizing gentle handling and contamination prevention.
Defense and security applications drive demand for highly specialized underwater manipulation systems. Naval operations require robots capable of mine disposal, hull inspection, and underwater construction tasks. These applications demand robust end effectors with enhanced reliability and the ability to operate in contested environments.
Infrastructure maintenance represents a rapidly expanding market segment. Underwater inspection and repair of bridges, dams, and port facilities require manipulation systems capable of performing structural assessments and minor repairs. The aging infrastructure in developed nations has created sustained demand for cost-effective underwater maintenance solutions.
Environmental monitoring and cleanup operations have gained prominence following increased environmental awareness. Oil spill response, marine debris removal, and ecosystem restoration projects require specialized manipulation capabilities. These applications demand end effectors designed for environmental sensitivity and contamination control.
The commercial diving industry increasingly adopts robotic systems to reduce human risk exposure. Complex manipulation tasks previously performed by human divers are transitioning to robotic solutions, driving demand for versatile end effector systems capable of replicating human dexterity underwater.
Market growth is further accelerated by technological advancements in underwater communication systems, improved battery technologies, and enhanced pressure-resistant materials. These developments have expanded the operational envelope for underwater robotic systems, creating new application opportunities and driving sustained market expansion across diverse industrial sectors.
Current Challenges in Underwater End Effector Performance
Underwater robotic end effectors face significant performance limitations due to the harsh marine environment's unique physical and chemical properties. Water density creates substantial resistance forces that impede precise manipulation, while hydrostatic pressure increases exponentially with depth, potentially compromising structural integrity and actuator functionality. These environmental factors fundamentally alter the operational parameters compared to terrestrial applications.
Corrosion represents a persistent threat to end effector longevity and reliability. Saltwater's aggressive chemical composition accelerates oxidation processes, particularly affecting metallic components and electrical connections. Even with protective coatings and specialized materials, long-term exposure leads to degradation of critical mechanical interfaces, sensors, and actuators. This corrosion challenge becomes more severe in deep-sea applications where maintenance accessibility is extremely limited.
Sealing and waterproofing technologies present ongoing technical obstacles for maintaining end effector performance. Traditional sealing methods often fail under varying pressure conditions, leading to water ingress that damages internal mechanisms. Dynamic seals around moving joints are particularly vulnerable, as they must maintain integrity while allowing mechanical motion. The trade-off between seal effectiveness and mechanical flexibility remains a significant engineering challenge.
Sensor integration and feedback systems suffer from reduced effectiveness in underwater environments. Optical sensors experience limited visibility due to water turbidity and light attenuation, while tactile sensors face sensitivity issues due to water's dampening effects. Force feedback mechanisms struggle with the altered dynamics of underwater manipulation, where buoyancy and fluid resistance modify the expected force-displacement relationships.
Power transmission and electrical systems encounter substantial challenges in underwater applications. Electrical conductivity of seawater creates risks of short circuits and power loss, while battery performance degrades under pressure and temperature variations. Motor efficiency decreases due to increased load requirements for overcoming water resistance, leading to reduced operational endurance and precision control capabilities.
Material selection constraints limit design flexibility for underwater end effectors. Components must balance strength, corrosion resistance, and weight considerations while maintaining cost-effectiveness. Advanced materials like titanium alloys and specialized polymers offer improved performance but increase system complexity and manufacturing costs, creating barriers for widespread adoption in commercial underwater robotics applications.
Corrosion represents a persistent threat to end effector longevity and reliability. Saltwater's aggressive chemical composition accelerates oxidation processes, particularly affecting metallic components and electrical connections. Even with protective coatings and specialized materials, long-term exposure leads to degradation of critical mechanical interfaces, sensors, and actuators. This corrosion challenge becomes more severe in deep-sea applications where maintenance accessibility is extremely limited.
Sealing and waterproofing technologies present ongoing technical obstacles for maintaining end effector performance. Traditional sealing methods often fail under varying pressure conditions, leading to water ingress that damages internal mechanisms. Dynamic seals around moving joints are particularly vulnerable, as they must maintain integrity while allowing mechanical motion. The trade-off between seal effectiveness and mechanical flexibility remains a significant engineering challenge.
Sensor integration and feedback systems suffer from reduced effectiveness in underwater environments. Optical sensors experience limited visibility due to water turbidity and light attenuation, while tactile sensors face sensitivity issues due to water's dampening effects. Force feedback mechanisms struggle with the altered dynamics of underwater manipulation, where buoyancy and fluid resistance modify the expected force-displacement relationships.
Power transmission and electrical systems encounter substantial challenges in underwater applications. Electrical conductivity of seawater creates risks of short circuits and power loss, while battery performance degrades under pressure and temperature variations. Motor efficiency decreases due to increased load requirements for overcoming water resistance, leading to reduced operational endurance and precision control capabilities.
Material selection constraints limit design flexibility for underwater end effectors. Components must balance strength, corrosion resistance, and weight considerations while maintaining cost-effectiveness. Advanced materials like titanium alloys and specialized polymers offer improved performance but increase system complexity and manufacturing costs, creating barriers for widespread adoption in commercial underwater robotics applications.
Existing Underwater End Effector Design Solutions
01 Adaptive gripping mechanisms for robotic end effectors
Robotic end effectors can be designed with adaptive gripping mechanisms that automatically adjust to different object shapes, sizes, and materials. These mechanisms typically incorporate flexible fingers, adjustable grip force, and sensor feedback systems to ensure secure handling of various objects. The adaptive nature allows for improved versatility in automated manufacturing and assembly processes.- Gripper mechanisms and grasping systems: End effectors designed with various gripper configurations including parallel jaw grippers, multi-finger grippers, and adaptive grasping mechanisms. These systems incorporate force feedback sensors and position control to enable precise manipulation of objects with different shapes, sizes, and materials. The gripper mechanisms can be pneumatically, electrically, or hydraulically actuated to provide appropriate gripping force and dexterity for specific applications.
- Tool changing and modular attachment systems: Automated tool changing mechanisms that allow robots to switch between different end effector tools during operation. These systems feature quick-connect interfaces, automatic locking mechanisms, and tool recognition capabilities. The modular design enables robots to perform multiple tasks by automatically selecting and attaching the appropriate tool from a tool magazine or storage system, improving operational flexibility and efficiency.
- Sensor integration and feedback control: End effectors equipped with various sensing technologies including force/torque sensors, tactile sensors, vision systems, and proximity sensors. These integrated sensors provide real-time feedback for precise manipulation, object detection, and adaptive control. The sensor data enables the robotic system to adjust gripping force, detect slip conditions, and perform delicate assembly operations with enhanced accuracy and safety.
- Specialized application end effectors: Task-specific end effector designs for specialized applications such as welding, painting, material handling, and assembly operations. These tools are optimized for particular industrial processes and include features like rotating spindles, suction cups, magnetic grippers, and process-specific tooling. The designs consider factors such as payload capacity, reach requirements, and environmental conditions specific to the intended application.
- Compliance and safety mechanisms: End effector designs incorporating compliance mechanisms, safety features, and collision detection systems. These include passive compliance devices, breakaway mechanisms, and emergency stop capabilities to protect both the robotic system and surrounding environment. The compliance features allow the end effector to accommodate positional uncertainties and provide safe interaction with humans and delicate objects during operation.
02 Multi-functional tool integration in end effectors
End effectors can be equipped with multiple integrated tools to perform various operations without requiring tool changes. These systems may include cutting tools, welding equipment, sensors, and manipulation devices all within a single end effector unit. This integration reduces cycle times and increases operational efficiency in robotic applications.Expand Specific Solutions03 Force and tactile sensing capabilities
Advanced end effectors incorporate force and tactile sensing technologies to provide feedback about contact forces, object properties, and grip conditions. These sensing capabilities enable precise control during delicate operations and prevent damage to both the workpiece and the robotic system. The sensors can detect slip, measure applied forces, and identify material characteristics.Expand Specific Solutions04 Modular and interchangeable end effector systems
Modular end effector designs allow for quick reconfiguration and tool changes to accommodate different tasks and applications. These systems feature standardized interfaces, automatic tool changers, and modular components that can be easily swapped or recombined. This modularity provides flexibility in production environments and reduces downtime for tool changes.Expand Specific Solutions05 Specialized end effectors for specific applications
End effectors can be designed for specialized applications such as medical procedures, food handling, electronics assembly, or hazardous material manipulation. These specialized tools incorporate application-specific features like sterile materials, contamination prevention, precision positioning, or protective coatings to meet industry-specific requirements and safety standards.Expand Specific Solutions
Key Players in Underwater Robotics and End Effector Industry
The underwater robotic end effector market represents an emerging sector within the broader marine robotics industry, currently in its early development stage with significant growth potential driven by increasing offshore energy exploration, underwater infrastructure maintenance, and marine research activities. The market remains relatively niche but is expanding as subsea operations become more complex and demanding. Technology maturity varies considerably across different applications, with established players like Boeing, Lockheed Martin, and Kawasaki Heavy Industries leveraging their aerospace and defense expertise to develop sophisticated underwater manipulation systems. Research institutions including Harbin Engineering University, Tohoku University, and China Ship Scientific Research Center are advancing fundamental technologies in underwater robotics and marine engineering. Industrial automation leaders such as FANUC, KUKA Systems, and Comau are adapting their terrestrial robotic solutions for marine environments, while specialized companies like Nauticus Robotics and DarkVision Technologies focus specifically on underwater applications, indicating a maturing competitive landscape with both diversified and specialized approaches.
Harbin Engineering University
Technical Solution: Harbin Engineering University has developed biomimetic underwater robotic end effectors inspired by marine organisms such as octopus tentacles and fish fins. Their research focuses on soft robotics technology that utilizes flexible materials and pneumatic actuation systems specifically designed for underwater manipulation tasks. The university's end effectors employ shape-memory alloys and electroactive polymers that maintain flexibility and responsiveness in cold underwater environments. Their systems incorporate distributed sensing networks that provide tactile feedback across the entire end effector surface, enabling gentle handling of marine specimens and delicate underwater structures. The technology includes adaptive gripping mechanisms that can conform to irregular shapes commonly encountered in underwater environments.
Strengths: Innovative biomimetic approach with advanced soft robotics research capabilities. Weaknesses: Academic institution with limited commercial deployment and manufacturing scale.
Kawasaki Heavy Industries Ltd.
Technical Solution: Kawasaki Heavy Industries has developed waterproof robotic end effectors for underwater welding and cutting applications, particularly for ship hull maintenance and offshore platform construction. Their technology employs sealed servo motors with magnetic coupling systems that eliminate the need for dynamic seals, reducing failure points in underwater environments. The end effectors incorporate plasma cutting tools and friction stir welding capabilities that function effectively underwater, with specialized cooling systems that utilize the surrounding water medium. Their systems feature modular tool-changing capabilities, allowing a single robotic platform to switch between different end effector configurations for various underwater tasks including inspection, repair, and construction operations.
Strengths: Strong industrial robotics background with proven underwater welding technology. Weaknesses: Primarily focused on heavy industrial applications rather than precision manipulation tasks.
Core Innovations in Underwater Manipulation Technologies
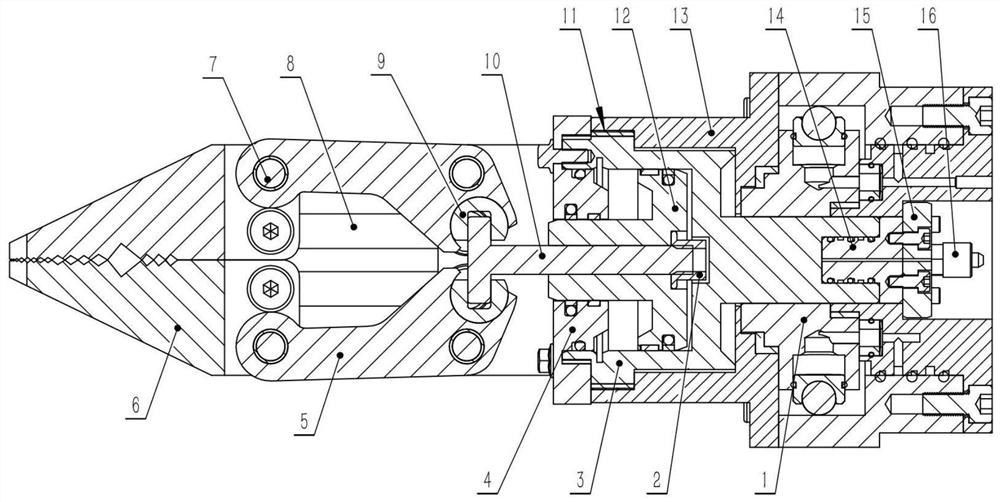
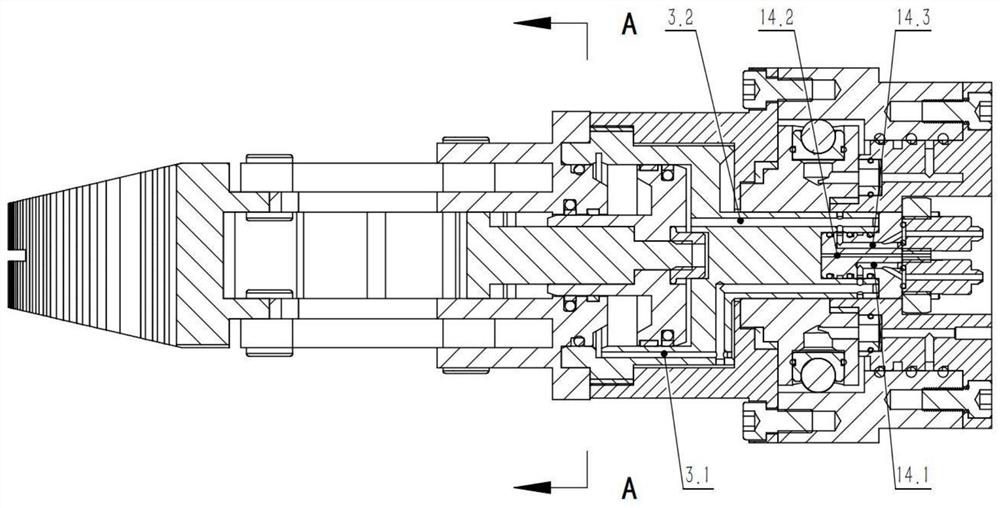
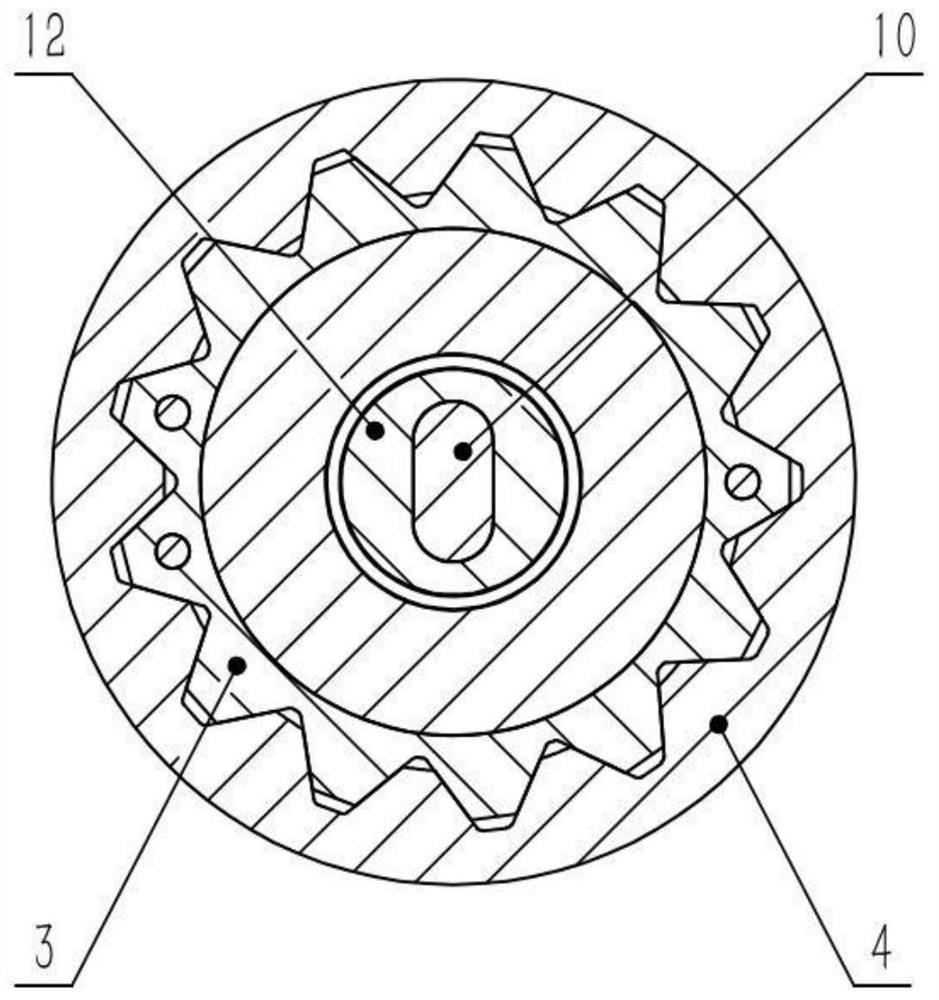
Mechanical arm end effector for underwater salvage and use method of mechanical arm end effector
PatentPendingCN120942526A
Innovation
- An underwater salvage robotic arm end effector integrating a drill bit assembly, guide flange, hydraulic cylinder structure, and hydraulic motor was designed. It can drill holes on the surface of the target object through the drill bit assembly and anchor them as lifting points. Combined with the guide flange and hydraulic system, it can achieve rapid installation of multiple lifting points and simplify the operation process.




Water drive integrated manipulator end effector
PatentActiveCN112809717A
Innovation
- The integrated manipulator end effector driven by water pressure is designed as an integrated structure, including an end clamp mechanism, a special-shaped hydraulic cylinder mechanism and a rotary joint mechanism. It reduces connection complexity by sharing the base and cylinder barrel, and uses high-strength wear-resistant materials. It realizes rotary dynamic sealing with the internal water channel, which solves the problem of pipeline entanglement.

Marine Environmental Regulations for Underwater Robotics
The regulatory landscape governing underwater robotics operations presents a complex framework of international, national, and regional requirements that directly impact the design and deployment of robotic end effectors in marine environments. The United Nations Convention on the Law of the Sea (UNCLOS) establishes foundational principles for underwater activities, while the International Maritime Organization (IMO) provides specific guidelines for autonomous underwater systems. These regulations mandate strict environmental protection measures, requiring end effector designs to minimize ecological disruption and prevent contamination of marine ecosystems.
Environmental impact assessments have become mandatory for most underwater robotic operations, particularly those involving manipulation tasks in sensitive marine habitats. The Marine Strategy Framework Directive in European waters and similar legislation in other jurisdictions require comprehensive evaluation of potential effects on marine biodiversity. End effector materials must comply with biocompatibility standards, avoiding toxic substances that could leach into seawater during extended operations.
Waste discharge regulations significantly influence end effector design specifications, as any debris or particulate matter generated during manipulation tasks must be contained or managed according to strict protocols. The MARPOL Convention's Annex V provisions extend to robotic systems, requiring zero discharge of plastics and controlled release of other materials. This necessitates the integration of collection systems within end effector assemblies for operations involving cutting, drilling, or material removal.
Protected area designations, including Marine Protected Areas (MPAs) and Particularly Sensitive Sea Areas (PSSAs), impose additional constraints on robotic operations. These zones often require specialized end effector configurations that minimize physical contact with seafloor substrates and reduce acoustic signatures to protect marine wildlife. Seasonal restrictions in breeding areas further complicate operational planning and may require adaptive end effector designs capable of modified operation modes.
Emerging regulations addressing deep-sea mining and offshore renewable energy installations are establishing new precedents for underwater robotic compliance. These frameworks increasingly emphasize real-time environmental monitoring capabilities, driving requirements for sensor integration within end effector systems to ensure continuous compliance verification during manipulation tasks.
Environmental impact assessments have become mandatory for most underwater robotic operations, particularly those involving manipulation tasks in sensitive marine habitats. The Marine Strategy Framework Directive in European waters and similar legislation in other jurisdictions require comprehensive evaluation of potential effects on marine biodiversity. End effector materials must comply with biocompatibility standards, avoiding toxic substances that could leach into seawater during extended operations.
Waste discharge regulations significantly influence end effector design specifications, as any debris or particulate matter generated during manipulation tasks must be contained or managed according to strict protocols. The MARPOL Convention's Annex V provisions extend to robotic systems, requiring zero discharge of plastics and controlled release of other materials. This necessitates the integration of collection systems within end effector assemblies for operations involving cutting, drilling, or material removal.
Protected area designations, including Marine Protected Areas (MPAs) and Particularly Sensitive Sea Areas (PSSAs), impose additional constraints on robotic operations. These zones often require specialized end effector configurations that minimize physical contact with seafloor substrates and reduce acoustic signatures to protect marine wildlife. Seasonal restrictions in breeding areas further complicate operational planning and may require adaptive end effector designs capable of modified operation modes.
Emerging regulations addressing deep-sea mining and offshore renewable energy installations are establishing new precedents for underwater robotic compliance. These frameworks increasingly emphasize real-time environmental monitoring capabilities, driving requirements for sensor integration within end effector systems to ensure continuous compliance verification during manipulation tasks.
Corrosion Resistance and Material Durability Considerations
The underwater environment presents one of the most challenging operational conditions for robotic end effectors, where corrosion resistance and material durability become critical factors determining system longevity and performance reliability. Seawater's high salinity, combined with dissolved oxygen and varying pH levels, creates an aggressive electrochemical environment that accelerates material degradation through multiple corrosion mechanisms.
Traditional metallic components face severe galvanic corrosion risks when dissimilar metals are coupled in seawater electrolyte solutions. Stainless steel grades commonly used in terrestrial applications, such as 304 and 316, demonstrate insufficient corrosion resistance for extended underwater deployment. Advanced marine-grade alloys, including super duplex stainless steels, Inconel 625, and titanium alloys, offer superior corrosion resistance but introduce significant cost implications and manufacturing complexities.
Polymer-based materials present attractive alternatives for underwater end effector applications. High-performance engineering plastics such as PEEK, POM, and reinforced nylon composites exhibit excellent chemical resistance while maintaining adequate mechanical properties. However, these materials face challenges including UV degradation in shallow water applications, stress cracking under cyclic loading, and potential biofouling accumulation on surface textures.
Protective coating systems play a crucial role in extending component lifespan. Epoxy-based marine coatings, polyurethane topcoats, and specialized anti-fouling formulations provide barrier protection against corrosive agents. Advanced ceramic coatings and diamond-like carbon films offer exceptional durability but require precise application processes and may compromise component repairability in field conditions.
Material selection must consider the synergistic effects of mechanical stress and corrosive exposure. Stress corrosion cracking becomes particularly problematic in high-strength alloys under tensile loading conditions. Fatigue life reduction due to corrosion pit initiation significantly impacts components subjected to repetitive operational cycles, necessitating conservative design factors and regular inspection protocols.
Cathodic protection systems, including sacrificial anodes and impressed current systems, provide additional corrosion mitigation strategies. However, these approaches require careful electrical isolation design and may interfere with sensitive electronic components integrated within modern robotic end effectors. The selection of appropriate anode materials and positioning becomes critical for achieving uniform protection distribution across complex geometries.
Traditional metallic components face severe galvanic corrosion risks when dissimilar metals are coupled in seawater electrolyte solutions. Stainless steel grades commonly used in terrestrial applications, such as 304 and 316, demonstrate insufficient corrosion resistance for extended underwater deployment. Advanced marine-grade alloys, including super duplex stainless steels, Inconel 625, and titanium alloys, offer superior corrosion resistance but introduce significant cost implications and manufacturing complexities.
Polymer-based materials present attractive alternatives for underwater end effector applications. High-performance engineering plastics such as PEEK, POM, and reinforced nylon composites exhibit excellent chemical resistance while maintaining adequate mechanical properties. However, these materials face challenges including UV degradation in shallow water applications, stress cracking under cyclic loading, and potential biofouling accumulation on surface textures.
Protective coating systems play a crucial role in extending component lifespan. Epoxy-based marine coatings, polyurethane topcoats, and specialized anti-fouling formulations provide barrier protection against corrosive agents. Advanced ceramic coatings and diamond-like carbon films offer exceptional durability but require precise application processes and may compromise component repairability in field conditions.
Material selection must consider the synergistic effects of mechanical stress and corrosive exposure. Stress corrosion cracking becomes particularly problematic in high-strength alloys under tensile loading conditions. Fatigue life reduction due to corrosion pit initiation significantly impacts components subjected to repetitive operational cycles, necessitating conservative design factors and regular inspection protocols.
Cathodic protection systems, including sacrificial anodes and impressed current systems, provide additional corrosion mitigation strategies. However, these approaches require careful electrical isolation design and may interfere with sensitive electronic components integrated within modern robotic end effectors. The selection of appropriate anode materials and positioning becomes critical for achieving uniform protection distribution across complex geometries.
Unlock deeper insights with Patsnap Eureka Quick Research — get a full tech report to explore trends and direct your research. Try now!
Generate Your Research Report Instantly with AI Agent
Supercharge your innovation with Patsnap Eureka AI Agent Platform!