

Robot Cable Harness Solutions for Collaborative Robot (Cobot) Design Needs
MAY 27, 20269 MIN READ
Generate Your Research Report Instantly with AI Agent
PatSnap Eureka helps you evaluate technical feasibility & market potential.
Cobot Cable Harness Technology Background and Objectives
Collaborative robots, commonly known as cobots, have emerged as a transformative force in industrial automation since their introduction in the mid-1990s. Unlike traditional industrial robots that operate in isolated environments, cobots are designed to work safely alongside human operators, sharing workspace and tasks. This fundamental shift in robotic design philosophy has created unprecedented challenges for cable harness systems, which must now accommodate dynamic movement patterns, frequent human interaction, and enhanced safety requirements.
The evolution of cobot technology has been marked by several key milestones, beginning with the foundational work at Northwestern University and the development of the first commercial cobots by companies like Universal Robots in 2008. As cobot adoption accelerated, reaching over 31,000 units sold globally by 2018, the limitations of conventional cable management solutions became increasingly apparent. Traditional rigid cable systems, designed for repetitive industrial applications, proved inadequate for the flexible, adaptive nature of collaborative robotics.
Cable harness systems in cobots face unique technical challenges that distinguish them from conventional robotic applications. The requirement for continuous flexing during operation, combined with the need for lightweight construction to maintain cobot safety standards, has driven demand for innovative cable solutions. These systems must withstand millions of flex cycles while maintaining signal integrity for power transmission, data communication, and sensor feedback across multiple joints simultaneously.
The primary objective of advanced cobot cable harness technology is to achieve seamless integration of electrical connectivity with mechanical flexibility. This involves developing cable assemblies that can endure the complex multi-axis movements characteristic of cobot operation while minimizing wear, reducing maintenance requirements, and ensuring consistent performance throughout the robot's operational lifespan. The technology must also support the increasing sophistication of cobot sensors and control systems, requiring higher data transmission rates and more complex signal routing.
Safety considerations represent another critical objective, as cable failures in collaborative environments pose risks to both human operators and equipment. Modern cobot cable harness solutions must incorporate fail-safe mechanisms, enhanced insulation properties, and materials that comply with stringent safety standards such as ISO 10218 and ISO/TS 15066. The technology aims to eliminate potential hazards associated with cable degradation, including electrical faults, mechanical entanglement, and debris generation that could compromise the collaborative workspace.
The evolution of cobot technology has been marked by several key milestones, beginning with the foundational work at Northwestern University and the development of the first commercial cobots by companies like Universal Robots in 2008. As cobot adoption accelerated, reaching over 31,000 units sold globally by 2018, the limitations of conventional cable management solutions became increasingly apparent. Traditional rigid cable systems, designed for repetitive industrial applications, proved inadequate for the flexible, adaptive nature of collaborative robotics.
Cable harness systems in cobots face unique technical challenges that distinguish them from conventional robotic applications. The requirement for continuous flexing during operation, combined with the need for lightweight construction to maintain cobot safety standards, has driven demand for innovative cable solutions. These systems must withstand millions of flex cycles while maintaining signal integrity for power transmission, data communication, and sensor feedback across multiple joints simultaneously.
The primary objective of advanced cobot cable harness technology is to achieve seamless integration of electrical connectivity with mechanical flexibility. This involves developing cable assemblies that can endure the complex multi-axis movements characteristic of cobot operation while minimizing wear, reducing maintenance requirements, and ensuring consistent performance throughout the robot's operational lifespan. The technology must also support the increasing sophistication of cobot sensors and control systems, requiring higher data transmission rates and more complex signal routing.
Safety considerations represent another critical objective, as cable failures in collaborative environments pose risks to both human operators and equipment. Modern cobot cable harness solutions must incorporate fail-safe mechanisms, enhanced insulation properties, and materials that comply with stringent safety standards such as ISO 10218 and ISO/TS 15066. The technology aims to eliminate potential hazards associated with cable degradation, including electrical faults, mechanical entanglement, and debris generation that could compromise the collaborative workspace.
Market Demand Analysis for Collaborative Robot Cable Solutions
The collaborative robot market has experienced unprecedented growth driven by increasing demand for flexible automation solutions across diverse industries. Manufacturing sectors including automotive, electronics, pharmaceuticals, and food processing are rapidly adopting cobots to enhance productivity while maintaining human-robot collaboration capabilities. This surge in cobot deployment has created substantial demand for specialized cable harness solutions that can withstand the unique operational requirements of collaborative robotics applications.
Traditional industrial robots operate within safety cages with limited movement patterns, but cobots require cable systems that support continuous articulation, frequent directional changes, and close proximity to human operators. The cable harness market for cobots is experiencing robust expansion as manufacturers recognize the critical role of reliable cable management in ensuring operational efficiency and safety compliance. Industries are increasingly prioritizing cable solutions that offer extended service life, reduced maintenance requirements, and enhanced flexibility.
The automotive industry represents the largest market segment for cobot cable solutions, driven by the need for precise assembly operations and quality control processes. Electronics manufacturing follows closely, where cobots perform delicate component handling and testing procedures requiring highly flexible cable systems. The pharmaceutical sector is emerging as a significant growth area, with cobots handling packaging, sorting, and laboratory automation tasks that demand contamination-resistant cable solutions.
Market demand is increasingly focused on cable harness systems that integrate multiple functionalities within compact designs. End users are seeking solutions that combine power transmission, data communication, pneumatic lines, and sensor feedback capabilities in single cable assemblies. This trend toward integrated cable solutions reflects the growing sophistication of cobot applications and the need for streamlined installation processes.
Regional market dynamics show strong demand concentration in North America, Europe, and Asia-Pacific regions, with China, Germany, and the United States leading cobot adoption rates. Small and medium enterprises are becoming significant market drivers as cobot technology becomes more accessible and cost-effective. These organizations require cable solutions that offer plug-and-play installation capabilities and minimal technical expertise requirements.
The market is also witnessing increased demand for application-specific cable solutions tailored to particular industry requirements. Food-grade materials, cleanroom-compatible designs, and explosion-proof configurations are becoming standard requirements rather than specialized options. This specialization trend is creating opportunities for cable manufacturers to develop niche solutions that command premium pricing while addressing specific regulatory and operational challenges.
Traditional industrial robots operate within safety cages with limited movement patterns, but cobots require cable systems that support continuous articulation, frequent directional changes, and close proximity to human operators. The cable harness market for cobots is experiencing robust expansion as manufacturers recognize the critical role of reliable cable management in ensuring operational efficiency and safety compliance. Industries are increasingly prioritizing cable solutions that offer extended service life, reduced maintenance requirements, and enhanced flexibility.
The automotive industry represents the largest market segment for cobot cable solutions, driven by the need for precise assembly operations and quality control processes. Electronics manufacturing follows closely, where cobots perform delicate component handling and testing procedures requiring highly flexible cable systems. The pharmaceutical sector is emerging as a significant growth area, with cobots handling packaging, sorting, and laboratory automation tasks that demand contamination-resistant cable solutions.
Market demand is increasingly focused on cable harness systems that integrate multiple functionalities within compact designs. End users are seeking solutions that combine power transmission, data communication, pneumatic lines, and sensor feedback capabilities in single cable assemblies. This trend toward integrated cable solutions reflects the growing sophistication of cobot applications and the need for streamlined installation processes.
Regional market dynamics show strong demand concentration in North America, Europe, and Asia-Pacific regions, with China, Germany, and the United States leading cobot adoption rates. Small and medium enterprises are becoming significant market drivers as cobot technology becomes more accessible and cost-effective. These organizations require cable solutions that offer plug-and-play installation capabilities and minimal technical expertise requirements.
The market is also witnessing increased demand for application-specific cable solutions tailored to particular industry requirements. Food-grade materials, cleanroom-compatible designs, and explosion-proof configurations are becoming standard requirements rather than specialized options. This specialization trend is creating opportunities for cable manufacturers to develop niche solutions that command premium pricing while addressing specific regulatory and operational challenges.
Current Challenges in Cobot Cable Harness Design
Collaborative robots face significant cable management challenges that directly impact their operational efficiency, safety, and longevity. The dynamic nature of cobot applications, which require continuous joint movement and flexible positioning, places extraordinary stress on cable harnesses that traditional industrial robots rarely encounter. These challenges stem from the fundamental design philosophy of cobots, which prioritizes human-robot interaction and adaptability over the static, predictable movements of conventional automation systems.
The most critical challenge lies in achieving optimal flexibility while maintaining signal integrity across power, data, and control cables. Cobots typically operate through six or more degrees of freedom, creating complex cable routing paths that must accommodate simultaneous multi-axis movements without interference. This requirement becomes particularly demanding when cables must traverse through joint assemblies while maintaining consistent electrical performance and mechanical durability.
Space constraints within cobot arm structures present another significant obstacle. Modern cobot designs emphasize compact, lightweight architectures to enhance safety and portability. However, this miniaturization severely limits the available internal space for cable routing, forcing engineers to develop increasingly sophisticated cable management solutions that can accommodate multiple cable types within confined geometries.
Durability requirements for cobot cable harnesses exceed those of traditional industrial applications due to the repetitive, high-frequency movements characteristic of collaborative operations. Standard cable assemblies often fail prematurely under the constant flexing, twisting, and bending motions required in cobot applications. The challenge intensifies when considering that cobots must maintain consistent performance across millions of operational cycles while operating in diverse environmental conditions.
Signal interference and electromagnetic compatibility issues pose additional complexity in cobot cable harness design. The close proximity of power and data cables within compact harness assemblies can lead to crosstalk and signal degradation, particularly affecting sensitive encoder feedback and communication protocols essential for precise cobot control and safety systems.
Manufacturing scalability represents a growing challenge as cobot adoption accelerates across industries. Current cable harness production methods often rely on manual assembly processes that struggle to meet the precision requirements and volume demands of the expanding cobot market. This manufacturing bottleneck directly impacts cost-effectiveness and delivery timelines for cobot manufacturers.
Finally, standardization gaps across different cobot platforms create fragmentation in cable harness solutions. The lack of industry-wide standards for connector types, cable specifications, and routing methodologies forces manufacturers to develop custom solutions for each cobot model, increasing development costs and limiting interoperability between systems.
The most critical challenge lies in achieving optimal flexibility while maintaining signal integrity across power, data, and control cables. Cobots typically operate through six or more degrees of freedom, creating complex cable routing paths that must accommodate simultaneous multi-axis movements without interference. This requirement becomes particularly demanding when cables must traverse through joint assemblies while maintaining consistent electrical performance and mechanical durability.
Space constraints within cobot arm structures present another significant obstacle. Modern cobot designs emphasize compact, lightweight architectures to enhance safety and portability. However, this miniaturization severely limits the available internal space for cable routing, forcing engineers to develop increasingly sophisticated cable management solutions that can accommodate multiple cable types within confined geometries.
Durability requirements for cobot cable harnesses exceed those of traditional industrial applications due to the repetitive, high-frequency movements characteristic of collaborative operations. Standard cable assemblies often fail prematurely under the constant flexing, twisting, and bending motions required in cobot applications. The challenge intensifies when considering that cobots must maintain consistent performance across millions of operational cycles while operating in diverse environmental conditions.
Signal interference and electromagnetic compatibility issues pose additional complexity in cobot cable harness design. The close proximity of power and data cables within compact harness assemblies can lead to crosstalk and signal degradation, particularly affecting sensitive encoder feedback and communication protocols essential for precise cobot control and safety systems.
Manufacturing scalability represents a growing challenge as cobot adoption accelerates across industries. Current cable harness production methods often rely on manual assembly processes that struggle to meet the precision requirements and volume demands of the expanding cobot market. This manufacturing bottleneck directly impacts cost-effectiveness and delivery timelines for cobot manufacturers.
Finally, standardization gaps across different cobot platforms create fragmentation in cable harness solutions. The lack of industry-wide standards for connector types, cable specifications, and routing methodologies forces manufacturers to develop custom solutions for each cobot model, increasing development costs and limiting interoperability between systems.
Existing Cable Harness Solutions for Collaborative Robots
01 Cable harness design and construction methods
Various design approaches and construction techniques for robot cable harnesses focus on optimizing cable routing, bundling, and structural integrity. These methods include specialized connector arrangements, cable management systems, and harness assembly processes that ensure reliable electrical connections while maintaining mechanical flexibility and durability in robotic applications.- Cable harness design and construction methods: Various design approaches and construction techniques for robot cable harnesses focus on optimizing cable routing, bundling, and structural integrity. These methods include specialized connector arrangements, cable management systems, and harness assembly techniques that ensure reliable electrical connections while maintaining mechanical flexibility and durability in robotic applications.
- Flexible and movable cable harness systems: Cable harness solutions designed for dynamic robotic movements incorporate flexible materials and mechanisms that allow cables to bend, twist, and extend without damage. These systems often feature specialized cable carriers, flexible conduits, and strain relief mechanisms that accommodate the repetitive motions and varying positions of robotic joints and actuators.
- Protective cable harness enclosures and shielding: Protection systems for robot cable harnesses include various enclosure designs, shielding methods, and protective coverings that safeguard cables from environmental hazards, electromagnetic interference, and mechanical damage. These solutions ensure reliable operation in industrial environments while maintaining signal integrity and preventing cable degradation.
- Modular and quick-connect cable harness interfaces: Modular cable harness systems feature standardized connectors and quick-disconnect interfaces that enable rapid assembly, maintenance, and reconfiguration of robotic systems. These solutions facilitate easy replacement of components, reduce downtime during maintenance, and allow for flexible system configurations to meet different operational requirements.
- Cable harness routing and management systems: Advanced cable management solutions provide organized routing paths and systematic arrangement of cables within robotic systems. These systems include cable guides, routing channels, and management hardware that optimize space utilization, prevent cable interference, and ensure proper cable separation for different signal types while maintaining accessibility for maintenance operations.
02 Flexible and movable cable harness systems
Cable harness solutions designed specifically for robotic joints and moving parts incorporate flexible materials and dynamic routing mechanisms. These systems accommodate repetitive motion, bending, and twisting while maintaining electrical continuity and preventing cable fatigue or damage during robot operation.Expand Specific Solutions03 Protective housing and shielding technologies
Advanced protective solutions for robot cable harnesses include specialized housings, conduits, and shielding mechanisms that protect cables from environmental hazards, electromagnetic interference, and mechanical damage. These technologies ensure reliable signal transmission and extend the operational lifespan of cable systems in harsh industrial environments.Expand Specific Solutions04 Modular and quick-connect cable assemblies
Modular cable harness designs enable rapid assembly, maintenance, and replacement of robot wiring systems. These solutions feature standardized connectors, plug-and-play interfaces, and modular components that simplify installation procedures and reduce downtime during robot servicing or reconfiguration.Expand Specific Solutions05 Cable management and routing optimization
Systematic approaches to cable organization and routing within robotic systems focus on minimizing interference, reducing weight, and optimizing space utilization. These solutions include cable guides, strain relief mechanisms, and intelligent routing paths that enhance robot performance while simplifying maintenance access.Expand Specific Solutions
Major Players in Cobot Cable Harness Industry
The robot cable harness solutions market for collaborative robots represents a rapidly evolving sector within the broader industrial automation landscape. The industry is transitioning from traditional industrial robotics to more flexible, human-collaborative applications, driving significant market expansion. Major established players like ABB, FANUC, KUKA, and Mitsubishi Electric dominate with mature technologies, while emerging companies such as Guangdong Huayan Robotics and UBTECH are advancing specialized cobot solutions. The technology maturity varies significantly across the ecosystem, with cable management specialists like TSUBAKI KABELSCHLEPP providing critical infrastructure components, while research institutions including Zhejiang University and Beijing Institute of Technology contribute to next-generation developments. This competitive landscape reflects a market in transition, where traditional automation giants compete alongside innovative startups to address the unique cable harness requirements of collaborative robotics applications.
ABB AB
Technical Solution: ABB develops integrated cable harness solutions specifically designed for collaborative robots, featuring flexible multi-conductor cables with enhanced bend radius capabilities and integrated power/signal transmission. Their cable systems incorporate advanced materials that provide superior flexibility while maintaining durability under continuous flexing motions typical in cobot applications. The harness design includes modular connectors that enable quick installation and maintenance, with built-in strain relief mechanisms to prevent cable fatigue. ABB's solution also features integrated safety circuits within the cable harness to support cobot safety requirements, including emergency stop functionality and force sensing capabilities that are essential for human-robot collaboration scenarios.
Strengths: Comprehensive integration with ABB's robot ecosystem, proven reliability in industrial applications, advanced safety features. Weaknesses: Higher cost compared to generic solutions, limited compatibility with non-ABB robot systems.
FANUC Corp.
Technical Solution: FANUC's cable harness solutions for collaborative robots focus on high-flexibility cable assemblies that can withstand millions of bend cycles while maintaining signal integrity. Their approach utilizes specialized cable construction with fine-stranded conductors and advanced insulation materials that provide excellent resistance to mechanical stress. The harness design incorporates FANUC's proprietary connector systems that ensure reliable power and data transmission for cobot operations. Their cable management system includes integrated cable tracks and guides that optimize cable routing and minimize wear during robot movement. FANUC also implements advanced shielding techniques to prevent electromagnetic interference that could affect sensitive cobot sensors and control systems.
Strengths: Exceptional durability and longevity, optimized for high-cycle applications, excellent EMI protection. Weaknesses: Premium pricing, primarily designed for FANUC robot systems, limited third-party integration options.
Key Innovations in Flexible Cobot Cable Technologies
Cable harness management module and a robot
PatentActiveUS20190366562A1
Innovation
- A cable harness management module comprising a base plate and a rotatable element that forms a space for the cable harness, with fastening members and a cover to securely manage and protect the cable harness during rotation, including elastic parts and tubes for additional protection and mounting convenience.




Industrial robot
PatentInactiveUS20070031232A1
Innovation
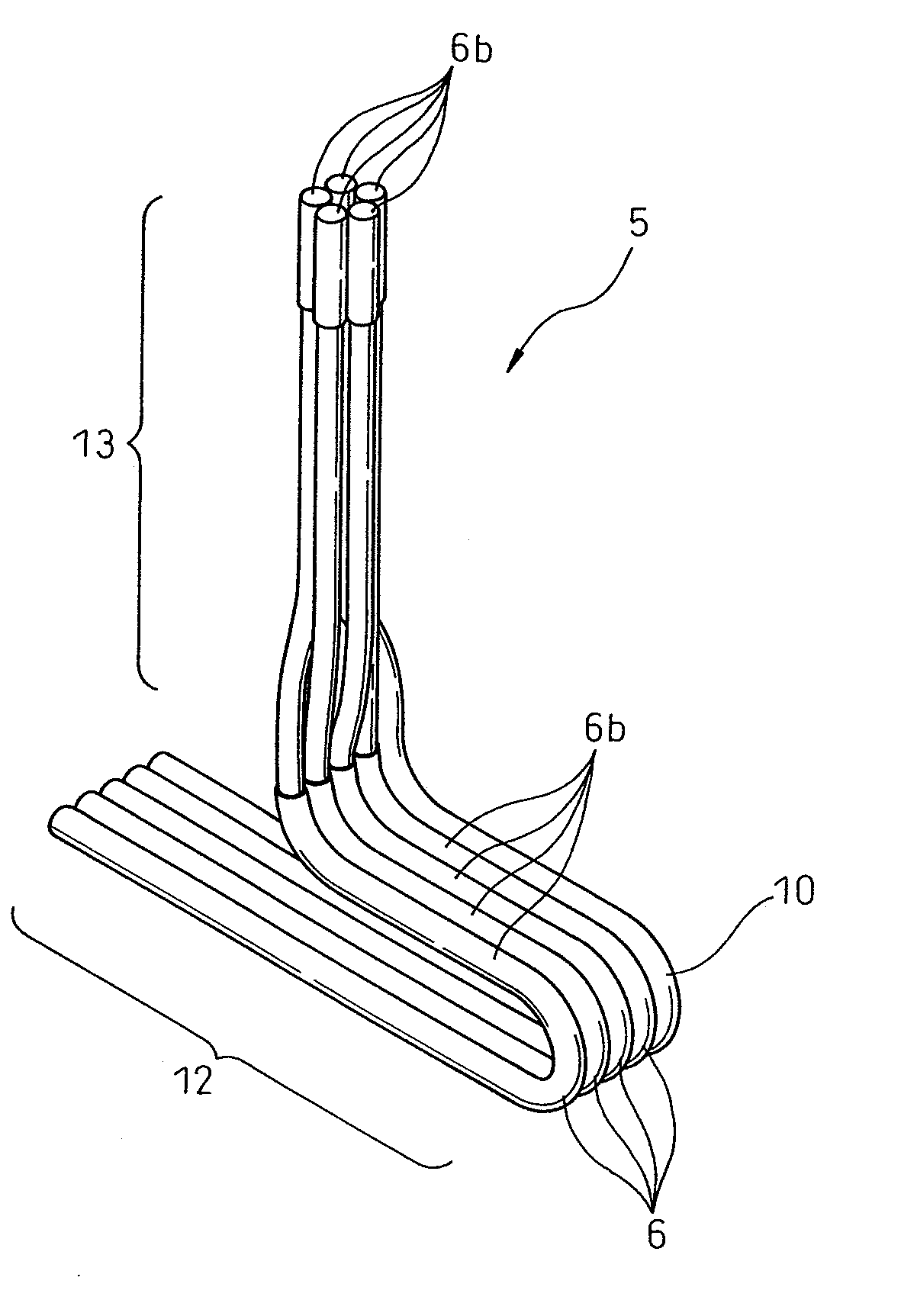
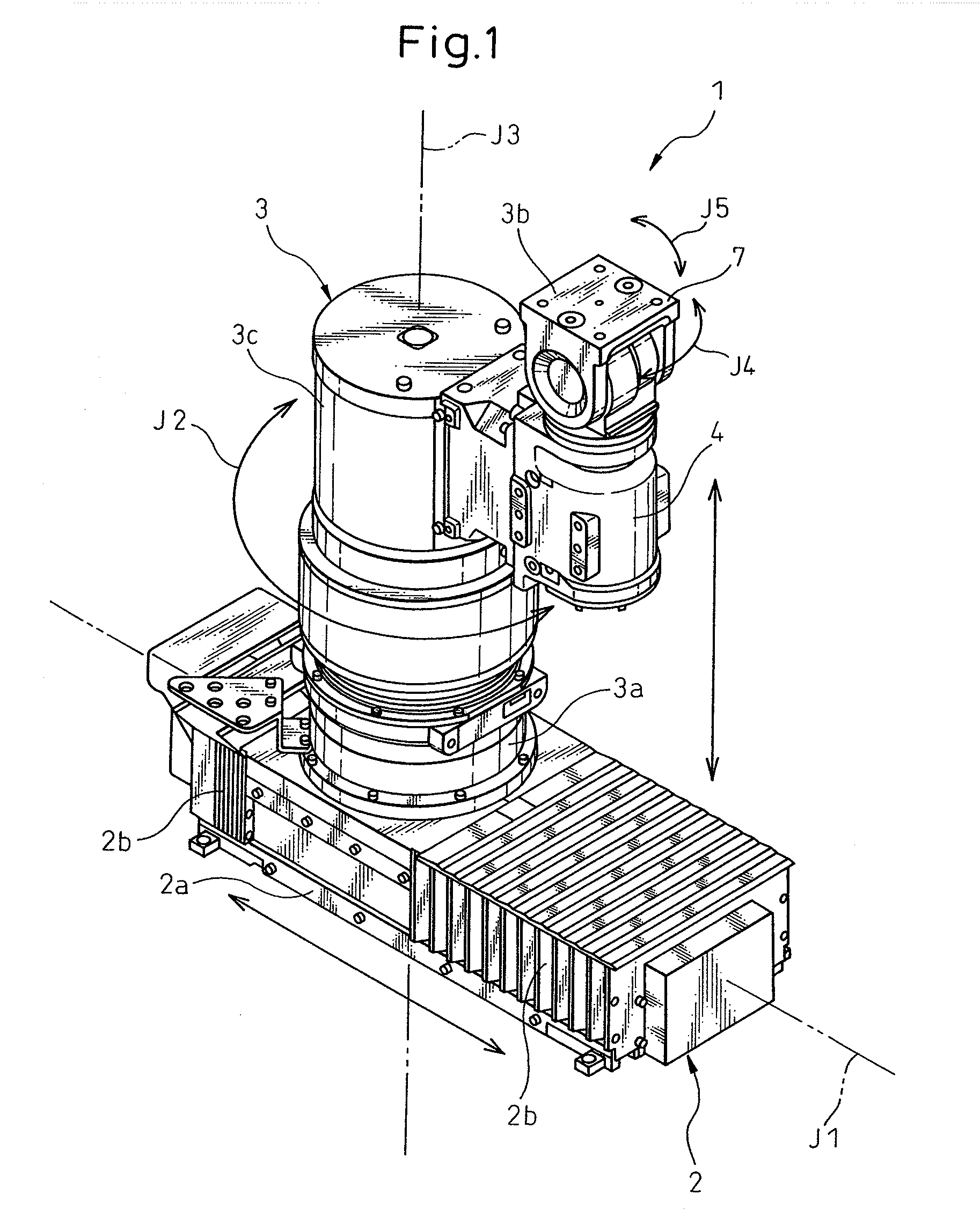
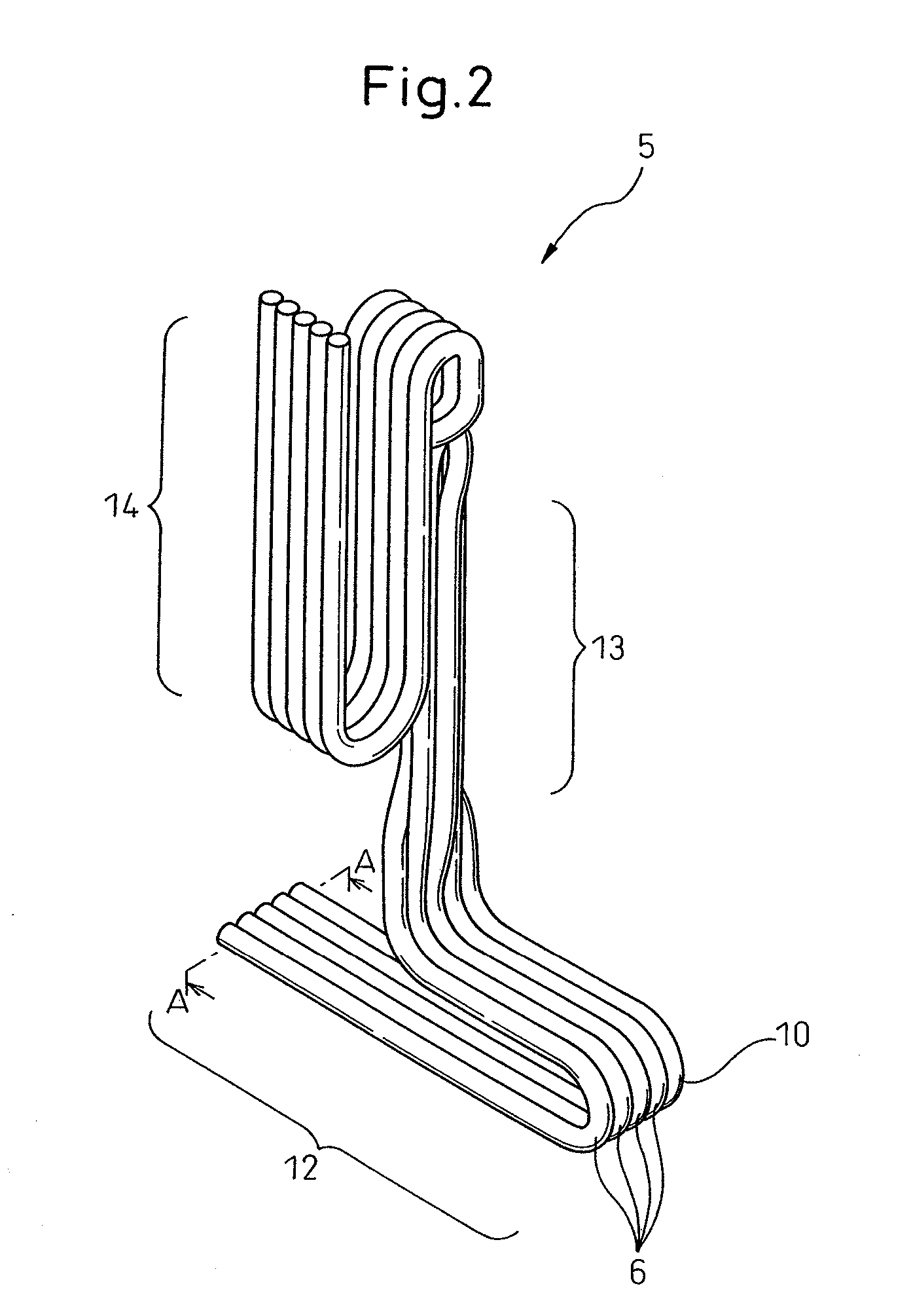
- A cable harness system comprising a first bundle with flatly arranged and adhesive-bonded umbilical elements for compactness in linear motion parts and a second bundle with separated elements for flexibility in rotary motion parts, using multi-core cables with electromagnetic shielding and varying lengths to mitigate tension, and inserting the second bundle into a pipe member for protection.

Safety Standards for Collaborative Robot Cable Design
Safety standards for collaborative robot cable design represent a critical framework that governs the development and implementation of cable harness solutions in human-robot collaborative environments. These standards primarily stem from international safety organizations including ISO, IEC, and regional bodies such as ANSI and CE marking requirements. The foundational standard ISO 10218 establishes general safety requirements for industrial robots, while ISO/TS 15066 specifically addresses collaborative robot operations and human-robot interaction safety parameters.
Cable design safety standards for cobots encompass multiple technical domains including electrical safety, mechanical integrity, and functional safety requirements. IEC 60204-1 defines electrical safety standards for industrial machinery, establishing insulation requirements, conductor sizing, and protection against electrical hazards. The standard mandates specific voltage classifications, with Safety Extra Low Voltage (SELV) circuits typically limited to 60V DC or 30V AC to minimize shock risks during human contact scenarios.
Mechanical safety requirements focus on cable flexibility, bend radius limitations, and fatigue resistance specifications. Standards dictate minimum bend radius ratios, typically 10-15 times the cable diameter for dynamic applications, ensuring cable integrity throughout millions of operational cycles. Material specifications require halogen-free compounds to prevent toxic gas emission during potential fire incidents, while flame-retardant properties must meet UL94 V-0 or equivalent classifications.
Functional safety standards, particularly IEC 61508 and its machinery-specific derivative IEC 62061, establish Safety Integrity Level (SIL) requirements for safety-critical cable circuits. Emergency stop circuits must achieve SIL 3 classification, requiring redundant conductor paths and diagnostic capabilities to detect cable failures. These standards mandate specific cross-sectional areas for safety circuits, typically minimum 0.75mm² for emergency stop functions.
EMC compliance standards, including IEC 61000 series, address electromagnetic compatibility requirements for cobot cable systems. Shielding effectiveness specifications ensure proper signal integrity while preventing interference with safety systems. Cable routing standards require physical separation between power and signal conductors, with minimum spacing requirements varying based on voltage levels and signal sensitivity.
Recent developments in safety standards increasingly emphasize predictive maintenance capabilities and real-time cable health monitoring. Emerging standards propose integration of diagnostic conductors within cable assemblies, enabling continuous monitoring of insulation resistance, conductor continuity, and mechanical stress indicators to prevent safety system failures before they occur.
Cable design safety standards for cobots encompass multiple technical domains including electrical safety, mechanical integrity, and functional safety requirements. IEC 60204-1 defines electrical safety standards for industrial machinery, establishing insulation requirements, conductor sizing, and protection against electrical hazards. The standard mandates specific voltage classifications, with Safety Extra Low Voltage (SELV) circuits typically limited to 60V DC or 30V AC to minimize shock risks during human contact scenarios.
Mechanical safety requirements focus on cable flexibility, bend radius limitations, and fatigue resistance specifications. Standards dictate minimum bend radius ratios, typically 10-15 times the cable diameter for dynamic applications, ensuring cable integrity throughout millions of operational cycles. Material specifications require halogen-free compounds to prevent toxic gas emission during potential fire incidents, while flame-retardant properties must meet UL94 V-0 or equivalent classifications.
Functional safety standards, particularly IEC 61508 and its machinery-specific derivative IEC 62061, establish Safety Integrity Level (SIL) requirements for safety-critical cable circuits. Emergency stop circuits must achieve SIL 3 classification, requiring redundant conductor paths and diagnostic capabilities to detect cable failures. These standards mandate specific cross-sectional areas for safety circuits, typically minimum 0.75mm² for emergency stop functions.
EMC compliance standards, including IEC 61000 series, address electromagnetic compatibility requirements for cobot cable systems. Shielding effectiveness specifications ensure proper signal integrity while preventing interference with safety systems. Cable routing standards require physical separation between power and signal conductors, with minimum spacing requirements varying based on voltage levels and signal sensitivity.
Recent developments in safety standards increasingly emphasize predictive maintenance capabilities and real-time cable health monitoring. Emerging standards propose integration of diagnostic conductors within cable assemblies, enabling continuous monitoring of insulation resistance, conductor continuity, and mechanical stress indicators to prevent safety system failures before they occur.
Durability Testing Methods for Cobot Cable Harnesses
Durability testing for collaborative robot cable harnesses requires comprehensive evaluation methodologies that simulate real-world operational conditions. These testing protocols must account for the unique mechanical stresses, environmental exposures, and performance requirements specific to cobot applications where human-robot interaction demands exceptional reliability and safety standards.
Mechanical stress testing forms the foundation of cobot cable harness durability assessment. Flex cycle testing evaluates cable performance under repetitive bending motions typical of robotic arm movements, with test parameters including bend radius, cycle frequency, and angular displacement. Torsion testing examines cable behavior under twisting forces generated during multi-axis robot operations. Tensile strength testing determines maximum load capacity and elongation characteristics under pulling forces that may occur during cable routing or accidental contact scenarios.
Environmental durability testing encompasses temperature cycling, humidity exposure, and chemical resistance evaluation. Temperature testing spans operational ranges from -20°C to +80°C, simulating industrial environments and thermal variations from motor heating. Humidity testing at 85% relative humidity for extended periods assesses moisture ingress protection and insulation integrity. Chemical resistance testing exposes cables to common industrial fluids including cutting oils, cleaning solvents, and hydraulic fluids to verify material compatibility.
Electrical performance validation during durability testing monitors signal integrity, insulation resistance, and conductor continuity throughout mechanical and environmental stress cycles. High-frequency signal transmission testing ensures data communication reliability under dynamic conditions. Power delivery stability testing verifies consistent electrical performance for motor control and sensor power supply circuits during cable movement.
Accelerated aging protocols compress years of operational exposure into weeks of intensive testing. These methodologies combine multiple stress factors simultaneously, including elevated temperature, mechanical cycling, and electrical loading to predict long-term performance characteristics. Statistical analysis of failure modes and degradation patterns provides quantitative reliability metrics essential for cobot safety certification and maintenance scheduling optimization.
Mechanical stress testing forms the foundation of cobot cable harness durability assessment. Flex cycle testing evaluates cable performance under repetitive bending motions typical of robotic arm movements, with test parameters including bend radius, cycle frequency, and angular displacement. Torsion testing examines cable behavior under twisting forces generated during multi-axis robot operations. Tensile strength testing determines maximum load capacity and elongation characteristics under pulling forces that may occur during cable routing or accidental contact scenarios.
Environmental durability testing encompasses temperature cycling, humidity exposure, and chemical resistance evaluation. Temperature testing spans operational ranges from -20°C to +80°C, simulating industrial environments and thermal variations from motor heating. Humidity testing at 85% relative humidity for extended periods assesses moisture ingress protection and insulation integrity. Chemical resistance testing exposes cables to common industrial fluids including cutting oils, cleaning solvents, and hydraulic fluids to verify material compatibility.
Electrical performance validation during durability testing monitors signal integrity, insulation resistance, and conductor continuity throughout mechanical and environmental stress cycles. High-frequency signal transmission testing ensures data communication reliability under dynamic conditions. Power delivery stability testing verifies consistent electrical performance for motor control and sensor power supply circuits during cable movement.
Accelerated aging protocols compress years of operational exposure into weeks of intensive testing. These methodologies combine multiple stress factors simultaneously, including elevated temperature, mechanical cycling, and electrical loading to predict long-term performance characteristics. Statistical analysis of failure modes and degradation patterns provides quantitative reliability metrics essential for cobot safety certification and maintenance scheduling optimization.
Unlock deeper insights with PatSnap Eureka Quick Research — get a full tech report to explore trends and direct your research. Try now!
Generate Your Research Report Instantly with AI Agent
Supercharge your innovation with PatSnap Eureka AI Agent Platform!