

Robotic Foundation Models Vs Expert Systems For Predictive Control Efficiency
MAY 15, 20268 MIN READ
Generate Your Research Report Instantly with AI Agent
PatSnap Eureka helps you evaluate technical feasibility & market potential.
Robotic Foundation Models vs Expert Systems Background and Goals
The evolution of robotic control systems has reached a critical juncture where traditional expert systems face competition from emerging foundation models. Expert systems, developed since the 1970s, have dominated industrial robotics through rule-based architectures that encode domain-specific knowledge into logical frameworks. These systems excel in structured environments where predictable outcomes and deterministic behavior are paramount, making them the backbone of manufacturing automation for decades.
Foundation models represent a paradigm shift in robotic intelligence, leveraging large-scale neural networks trained on diverse datasets to develop generalized capabilities. Unlike expert systems that rely on explicitly programmed rules, foundation models learn patterns and relationships from data, enabling them to adapt to novel situations and demonstrate emergent behaviors. This approach has gained momentum following breakthroughs in natural language processing and computer vision, where transformer architectures have shown remarkable versatility.
The convergence of these two approaches in predictive control applications highlights fundamental questions about efficiency, reliability, and scalability. Expert systems offer transparent decision-making processes and guaranteed performance within defined parameters, while foundation models promise adaptability and learning capabilities that could revolutionize robotic autonomy. The challenge lies in determining optimal deployment strategies for different operational contexts.
Current technological objectives focus on maximizing predictive control efficiency while maintaining system reliability and safety standards. This involves evaluating computational overhead, response times, accuracy metrics, and adaptation capabilities across various robotic applications. The goal extends beyond simple performance comparisons to understanding how these technologies can complement each other in hybrid architectures.
The strategic importance of this comparison stems from its implications for future robotic system design, industrial automation investments, and the broader trajectory of artificial intelligence in physical systems. Organizations must navigate the trade-offs between proven expert system reliability and the transformative potential of foundation models to make informed technology adoption decisions.
Foundation models represent a paradigm shift in robotic intelligence, leveraging large-scale neural networks trained on diverse datasets to develop generalized capabilities. Unlike expert systems that rely on explicitly programmed rules, foundation models learn patterns and relationships from data, enabling them to adapt to novel situations and demonstrate emergent behaviors. This approach has gained momentum following breakthroughs in natural language processing and computer vision, where transformer architectures have shown remarkable versatility.
The convergence of these two approaches in predictive control applications highlights fundamental questions about efficiency, reliability, and scalability. Expert systems offer transparent decision-making processes and guaranteed performance within defined parameters, while foundation models promise adaptability and learning capabilities that could revolutionize robotic autonomy. The challenge lies in determining optimal deployment strategies for different operational contexts.
Current technological objectives focus on maximizing predictive control efficiency while maintaining system reliability and safety standards. This involves evaluating computational overhead, response times, accuracy metrics, and adaptation capabilities across various robotic applications. The goal extends beyond simple performance comparisons to understanding how these technologies can complement each other in hybrid architectures.
The strategic importance of this comparison stems from its implications for future robotic system design, industrial automation investments, and the broader trajectory of artificial intelligence in physical systems. Organizations must navigate the trade-offs between proven expert system reliability and the transformative potential of foundation models to make informed technology adoption decisions.
Market Demand for Advanced Robotic Predictive Control
The global robotics market is experiencing unprecedented growth driven by increasing automation demands across manufacturing, logistics, healthcare, and service sectors. Traditional robotic systems relying on expert systems have dominated industrial applications for decades, but emerging requirements for adaptive, intelligent automation are creating substantial market opportunities for advanced predictive control technologies.
Manufacturing industries represent the largest market segment, where production efficiency and quality consistency directly impact profitability. Automotive assembly lines, semiconductor fabrication, and precision manufacturing require robotic systems capable of real-time adaptation to varying conditions, material properties, and environmental factors. Current expert system-based controllers often struggle with unexpected scenarios, leading to production downtime and quality issues that cost manufacturers significant revenue.
The logistics and warehousing sector demonstrates rapidly expanding demand for intelligent robotic solutions. E-commerce growth has intensified requirements for flexible, scalable automation systems capable of handling diverse product types, packaging variations, and dynamic workflow changes. Traditional rule-based systems lack the adaptability needed for modern fulfillment centers, creating market pressure for more sophisticated predictive control approaches.
Healthcare robotics presents an emerging high-value market where precision and reliability are paramount. Surgical robots, rehabilitation devices, and patient care systems require predictive capabilities that can adapt to individual patient characteristics and real-time physiological changes. The limitations of expert systems in handling human variability create substantial opportunities for foundation model-based approaches.
Service robotics markets, including cleaning, security, and personal assistance applications, demand systems capable of operating in unstructured environments with minimal human intervention. These applications require robust predictive control that can handle environmental uncertainties and task variations that exceed the capabilities of traditional expert systems.
Market drivers include labor shortages in developed economies, increasing demand for customization and flexibility in production systems, and growing expectations for autonomous operation in complex environments. The convergence of artificial intelligence advances with robotics hardware improvements is creating favorable conditions for next-generation predictive control technologies that can capture significant market share from existing expert system solutions.
Manufacturing industries represent the largest market segment, where production efficiency and quality consistency directly impact profitability. Automotive assembly lines, semiconductor fabrication, and precision manufacturing require robotic systems capable of real-time adaptation to varying conditions, material properties, and environmental factors. Current expert system-based controllers often struggle with unexpected scenarios, leading to production downtime and quality issues that cost manufacturers significant revenue.
The logistics and warehousing sector demonstrates rapidly expanding demand for intelligent robotic solutions. E-commerce growth has intensified requirements for flexible, scalable automation systems capable of handling diverse product types, packaging variations, and dynamic workflow changes. Traditional rule-based systems lack the adaptability needed for modern fulfillment centers, creating market pressure for more sophisticated predictive control approaches.
Healthcare robotics presents an emerging high-value market where precision and reliability are paramount. Surgical robots, rehabilitation devices, and patient care systems require predictive capabilities that can adapt to individual patient characteristics and real-time physiological changes. The limitations of expert systems in handling human variability create substantial opportunities for foundation model-based approaches.
Service robotics markets, including cleaning, security, and personal assistance applications, demand systems capable of operating in unstructured environments with minimal human intervention. These applications require robust predictive control that can handle environmental uncertainties and task variations that exceed the capabilities of traditional expert systems.
Market drivers include labor shortages in developed economies, increasing demand for customization and flexibility in production systems, and growing expectations for autonomous operation in complex environments. The convergence of artificial intelligence advances with robotics hardware improvements is creating favorable conditions for next-generation predictive control technologies that can capture significant market share from existing expert system solutions.
Current State and Challenges in Robotic Control Systems
The contemporary robotic control landscape is characterized by a fundamental dichotomy between traditional expert systems and emerging foundation models, each presenting distinct advantages and limitations in predictive control applications. Expert systems have dominated industrial robotics for decades, leveraging rule-based architectures and domain-specific knowledge to achieve precise, deterministic control outcomes. These systems excel in structured environments where operational parameters remain relatively constant and failure modes are well-understood.
However, expert systems face significant scalability challenges when confronted with dynamic, unstructured environments. Their rigid rule-based frameworks struggle to adapt to novel scenarios outside their predefined operational boundaries, requiring extensive manual reprogramming for each new application domain. This limitation becomes particularly pronounced in modern robotics applications demanding real-time adaptation to changing environmental conditions.
Foundation models represent a paradigmatic shift toward data-driven, learning-based control architectures. These systems demonstrate remarkable generalization capabilities across diverse robotic platforms and tasks, leveraging large-scale pre-training on multimodal datasets. Recent developments in transformer-based architectures have enabled robots to process complex sensory inputs and generate sophisticated control policies without explicit programming.
Despite their promise, foundation models encounter substantial challenges in predictive control efficiency. Computational overhead remains a critical bottleneck, with inference latency often exceeding real-time requirements for high-frequency control loops. The black-box nature of these models also raises concerns regarding interpretability and safety verification, particularly in mission-critical applications where failure consequences are severe.
Current hybrid approaches attempt to bridge this gap by combining the reliability of expert systems with the adaptability of foundation models. These architectures typically employ expert systems for low-level control loops while utilizing foundation models for high-level planning and adaptation. However, seamless integration between these disparate paradigms remains technically challenging.
The field currently lacks standardized benchmarks for comparing predictive control efficiency across different architectural approaches. This absence of unified evaluation metrics complicates objective assessment of relative performance, hindering systematic advancement in robotic control methodologies and impeding widespread industrial adoption of next-generation control systems.
However, expert systems face significant scalability challenges when confronted with dynamic, unstructured environments. Their rigid rule-based frameworks struggle to adapt to novel scenarios outside their predefined operational boundaries, requiring extensive manual reprogramming for each new application domain. This limitation becomes particularly pronounced in modern robotics applications demanding real-time adaptation to changing environmental conditions.
Foundation models represent a paradigmatic shift toward data-driven, learning-based control architectures. These systems demonstrate remarkable generalization capabilities across diverse robotic platforms and tasks, leveraging large-scale pre-training on multimodal datasets. Recent developments in transformer-based architectures have enabled robots to process complex sensory inputs and generate sophisticated control policies without explicit programming.
Despite their promise, foundation models encounter substantial challenges in predictive control efficiency. Computational overhead remains a critical bottleneck, with inference latency often exceeding real-time requirements for high-frequency control loops. The black-box nature of these models also raises concerns regarding interpretability and safety verification, particularly in mission-critical applications where failure consequences are severe.
Current hybrid approaches attempt to bridge this gap by combining the reliability of expert systems with the adaptability of foundation models. These architectures typically employ expert systems for low-level control loops while utilizing foundation models for high-level planning and adaptation. However, seamless integration between these disparate paradigms remains technically challenging.
The field currently lacks standardized benchmarks for comparing predictive control efficiency across different architectural approaches. This absence of unified evaluation metrics complicates objective assessment of relative performance, hindering systematic advancement in robotic control methodologies and impeding widespread industrial adoption of next-generation control systems.
Existing Predictive Control Solutions Comparison
01 Foundation models for robotic control systems
Foundation models serve as the core architecture for robotic systems, providing comprehensive learning capabilities and adaptable control mechanisms. These models enable robots to understand complex environments and make intelligent decisions based on pre-trained knowledge and real-time data processing. The integration of foundation models enhances the overall performance and reliability of robotic control systems across various applications.- Foundation models for robotic control systems: Advanced foundation models are being developed to serve as the core intelligence for robotic systems, providing comprehensive understanding and decision-making capabilities. These models integrate multiple data modalities and learning paradigms to create robust control frameworks that can adapt to various robotic applications and environments.
- Expert systems integration with predictive control: Expert systems are being combined with predictive control algorithms to enhance decision-making efficiency in robotic applications. This integration leverages domain-specific knowledge and rule-based reasoning to improve the accuracy and reliability of predictive control mechanisms in complex robotic scenarios.
- Machine learning optimization for control efficiency: Machine learning techniques are being employed to optimize control efficiency in robotic systems by analyzing patterns, predicting outcomes, and continuously improving performance. These approaches focus on reducing computational overhead while maintaining high precision in robotic control tasks.
- Real-time predictive control algorithms: Real-time predictive control algorithms are being developed to enable immediate response and adaptation in robotic systems. These algorithms process sensor data and environmental information to make instantaneous control decisions, ensuring optimal performance in dynamic operating conditions.
- Hybrid control architectures for robotic systems: Hybrid control architectures combine multiple control methodologies to achieve superior performance in robotic applications. These systems integrate traditional control methods with modern artificial intelligence approaches, creating flexible and efficient control frameworks that can handle diverse operational requirements.
02 Expert systems integration for predictive control
Expert systems are incorporated into robotic frameworks to provide rule-based decision making and knowledge representation capabilities. These systems utilize domain-specific expertise to enhance predictive control algorithms, enabling more accurate forecasting of system behavior and optimal control strategies. The combination of expert systems with predictive control improves system efficiency and reduces operational uncertainties.Expand Specific Solutions03 Machine learning algorithms for control optimization
Advanced machine learning algorithms are employed to optimize control parameters and improve system performance in robotic applications. These algorithms analyze historical data and real-time feedback to continuously adapt and refine control strategies. The implementation of learning-based approaches enables autonomous optimization of control efficiency and system responsiveness.Expand Specific Solutions04 Real-time data processing and sensor fusion
Real-time data processing capabilities combined with sensor fusion techniques enable comprehensive environmental awareness and rapid response in robotic systems. Multiple sensor inputs are integrated and processed simultaneously to provide accurate situational understanding and support predictive control decisions. This approach enhances system reliability and enables proactive control adjustments based on environmental changes.Expand Specific Solutions05 Adaptive control frameworks and system architecture
Adaptive control frameworks provide flexible system architectures that can dynamically adjust to changing operational conditions and requirements. These frameworks incorporate feedback mechanisms and self-learning capabilities to continuously improve control performance. The modular design of adaptive systems allows for scalable implementation across different robotic platforms and applications while maintaining optimal efficiency levels.Expand Specific Solutions
Key Players in Foundation Models and Expert Systems
The robotic foundation models versus expert systems competition for predictive control efficiency represents an emerging market at a critical inflection point. The industry is transitioning from traditional rule-based expert systems to AI-driven foundation models, with market growth accelerated by advances in computational power and machine learning. Technology maturity varies significantly across players: NVIDIA Corp. leads in AI infrastructure and GPU acceleration, while established robotics companies like ABB Ltd., YASKAWA Electric Corp., and KUKA Deutschland GmbH bring decades of industrial automation expertise. Tech giants Google LLC and IBM Corp. contribute advanced AI capabilities, whereas specialized robotics firms like UBTECH Robotics Corp. and Sanctuary Cognitive Systems Corp. focus on humanoid applications. The competitive landscape shows traditional automation leaders adapting AI technologies while pure-play AI companies enter robotics, creating a dynamic ecosystem where hybrid approaches combining expert systems reliability with foundation model adaptability are emerging as the preferred solution.
NVIDIA Corp.
Technical Solution: NVIDIA has developed comprehensive robotic foundation models through their Isaac platform, combining large-scale transformer architectures with real-time control systems. Their approach leverages GPU-accelerated computing to process multimodal sensor data and generate predictive control commands with sub-millisecond latency. The Isaac Sim platform enables training foundation models on diverse robotic tasks using synthetic data generation, while their Jetson edge computing modules deploy these models for real-time predictive control. NVIDIA's solution integrates reinforcement learning with foundation model architectures to achieve adaptive control strategies that can generalize across different robotic platforms and environmental conditions.
Strengths: Superior computational power and parallel processing capabilities, extensive simulation environments for model training, strong hardware-software integration. Weaknesses: High power consumption, expensive hardware requirements, potential over-engineering for simple control tasks.
ABB Ltd.
Technical Solution: ABB focuses on expert systems for predictive control in industrial robotics, utilizing decades of domain expertise in manufacturing automation. Their approach combines traditional control theory with machine learning algorithms to optimize robot performance in structured environments. ABB's expert systems incorporate extensive rule-based knowledge about mechanical dynamics, thermal behavior, and wear patterns to predict maintenance needs and optimize control parameters. Their solutions emphasize deterministic behavior and safety-critical applications, using model predictive control algorithms that can guarantee performance bounds. The company's expertise in industrial automation allows them to create highly specialized control systems tailored to specific manufacturing processes and robotic applications.
Strengths: Deep industrial domain expertise, proven reliability in safety-critical applications, deterministic performance guarantees. Weaknesses: Limited adaptability to novel scenarios, requires extensive manual tuning, slower adaptation to changing environments compared to foundation models.
Core Innovations in Foundation Model Control Architecture
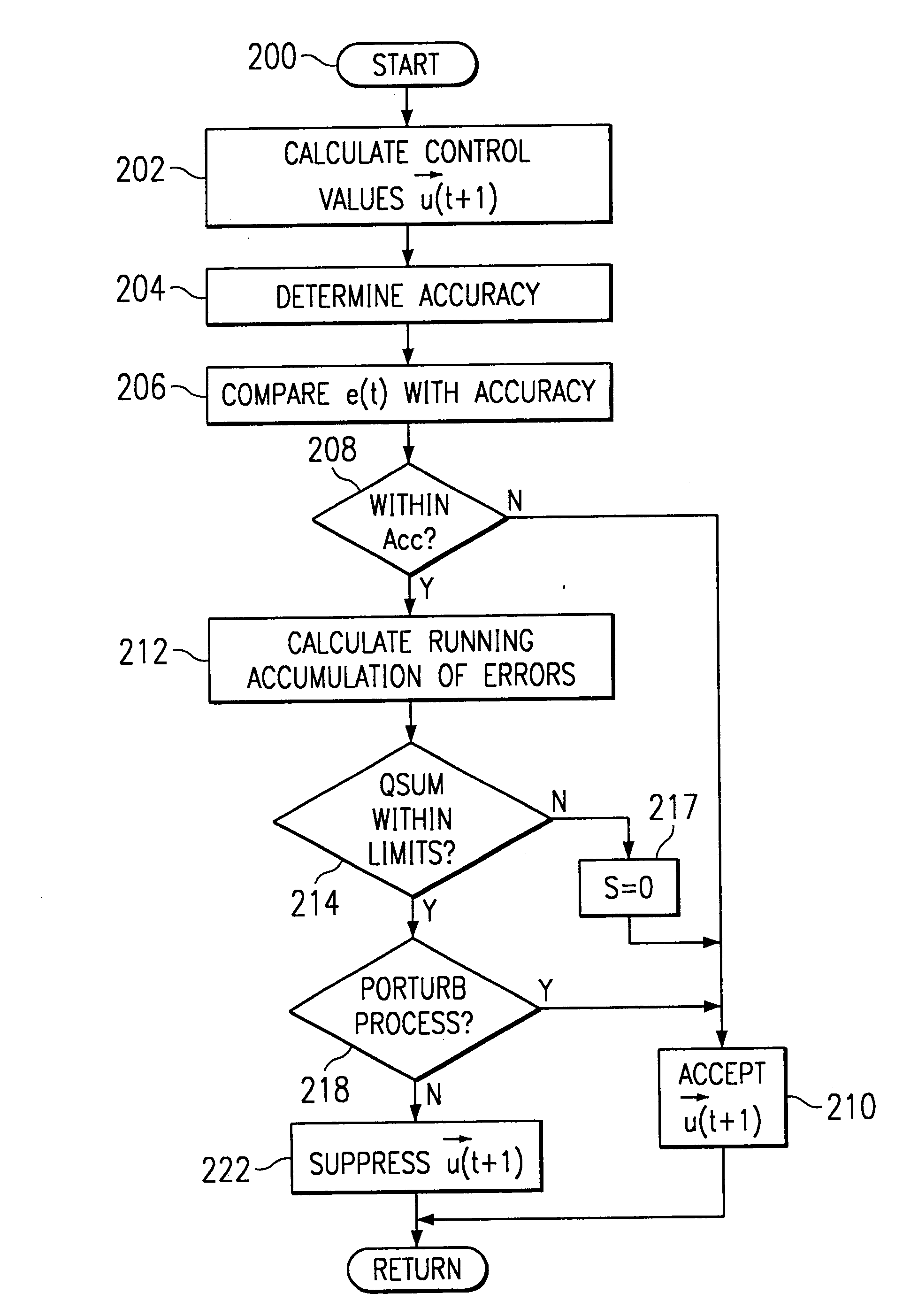
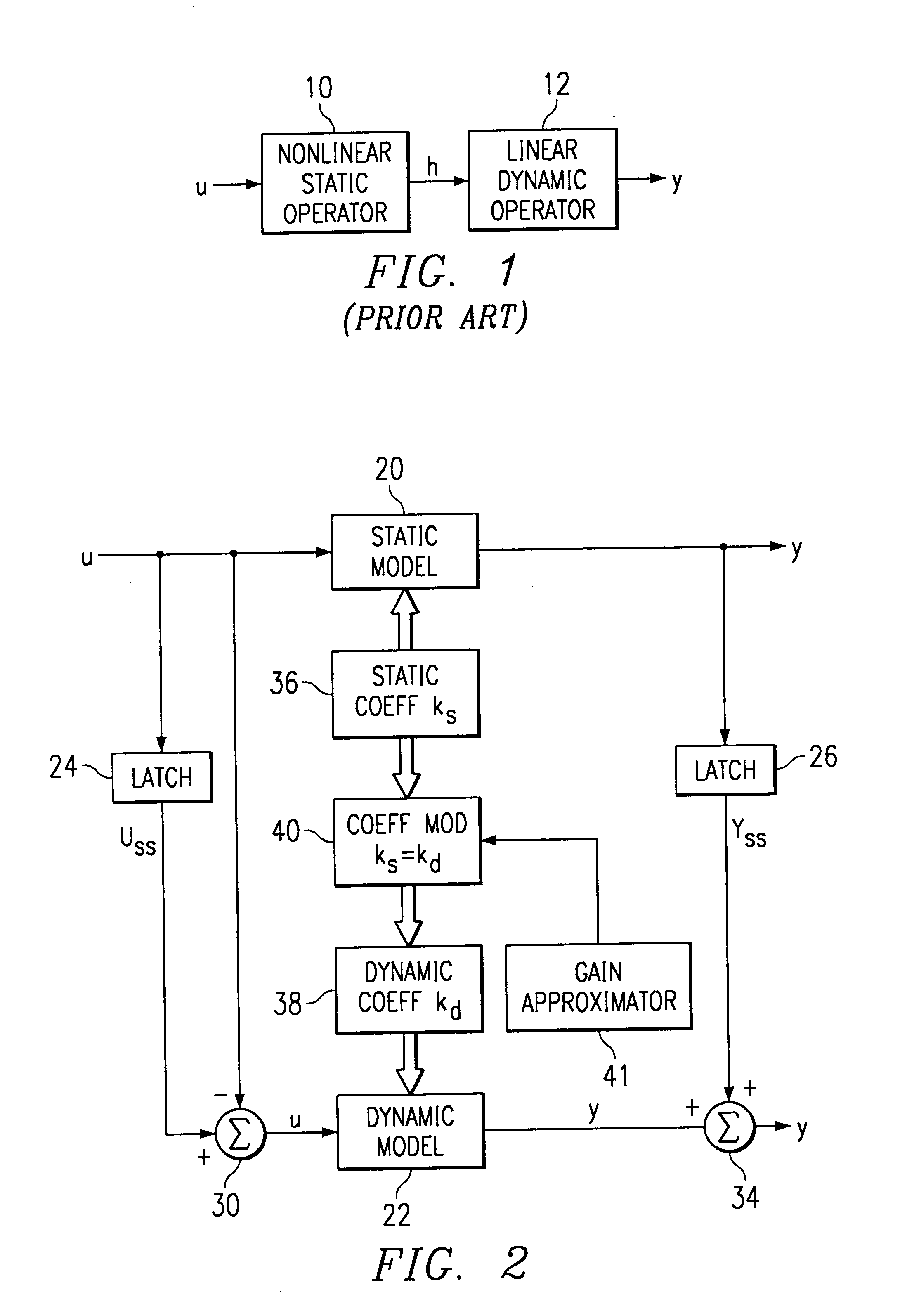
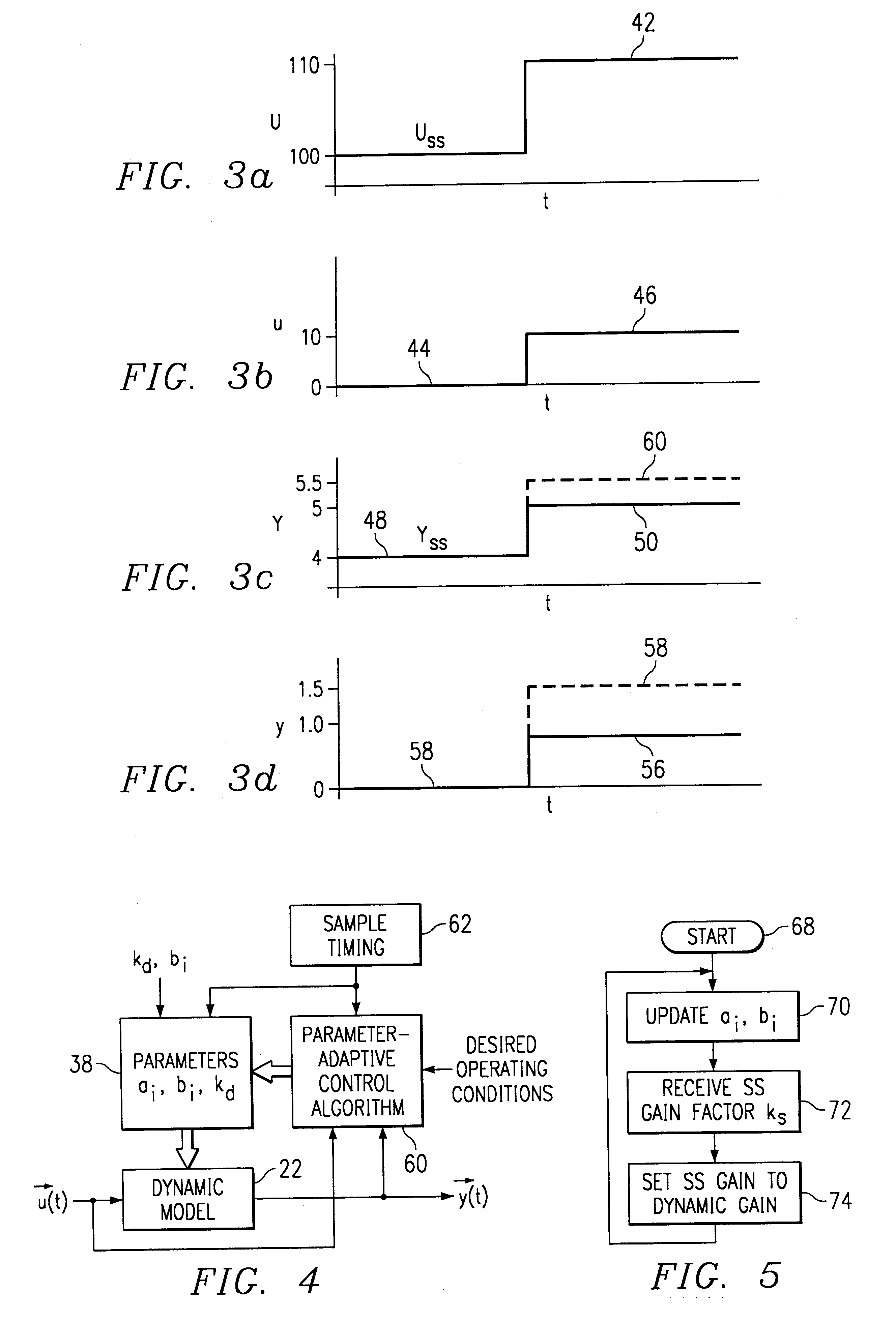
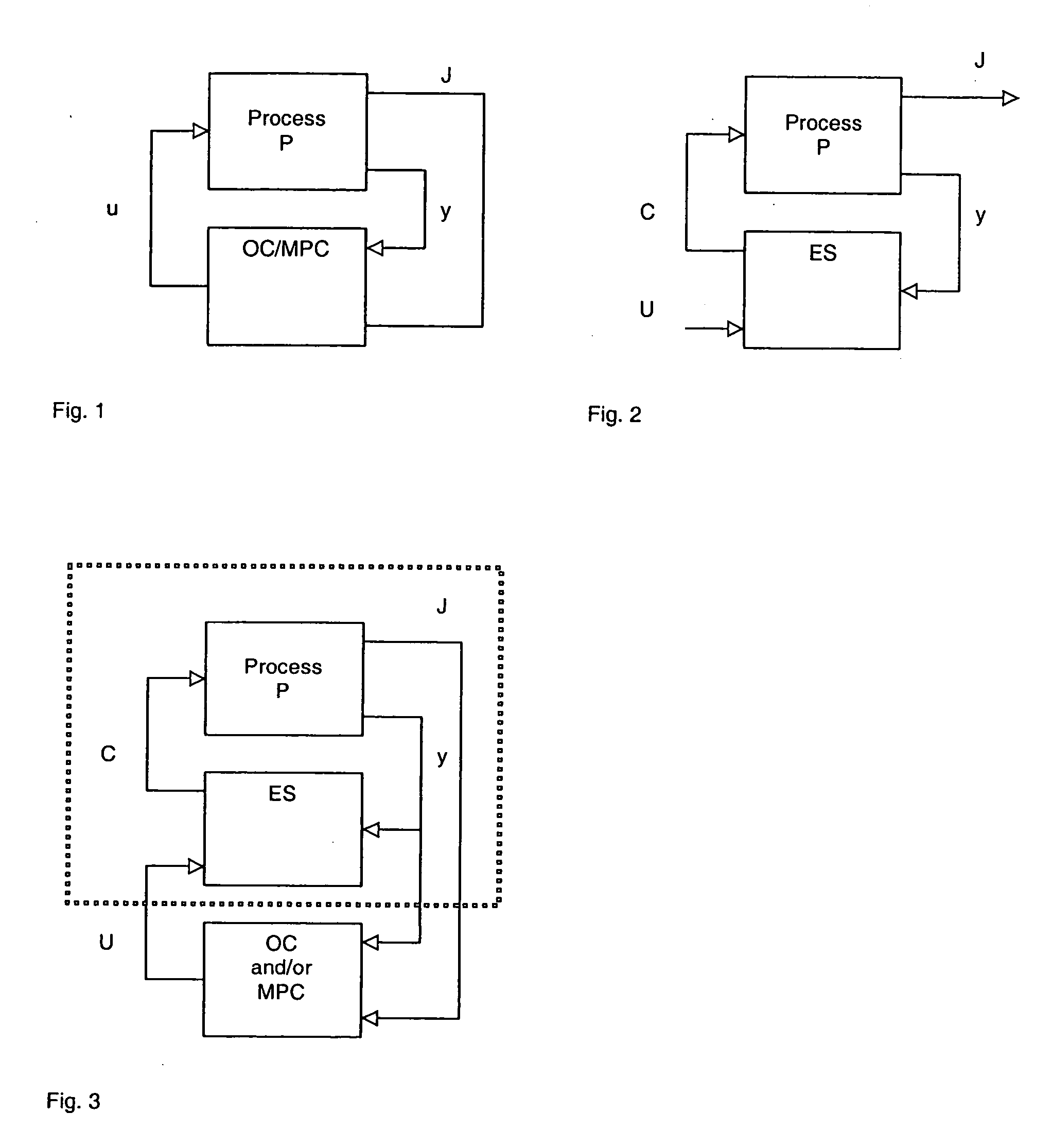
Kiln/cooler control and upset recovery using a combination of model predictive control and expert systems
PatentInactiveUS6839599B2
Innovation
- A method combining a non-linear static model with a linear dynamic model, using a Hammerstein model structure, where the dynamic model is constrained to match the steady-state gain, and an expert system is employed to override the controller for rapid response to chaotic events, ensuring consistent gains between models.

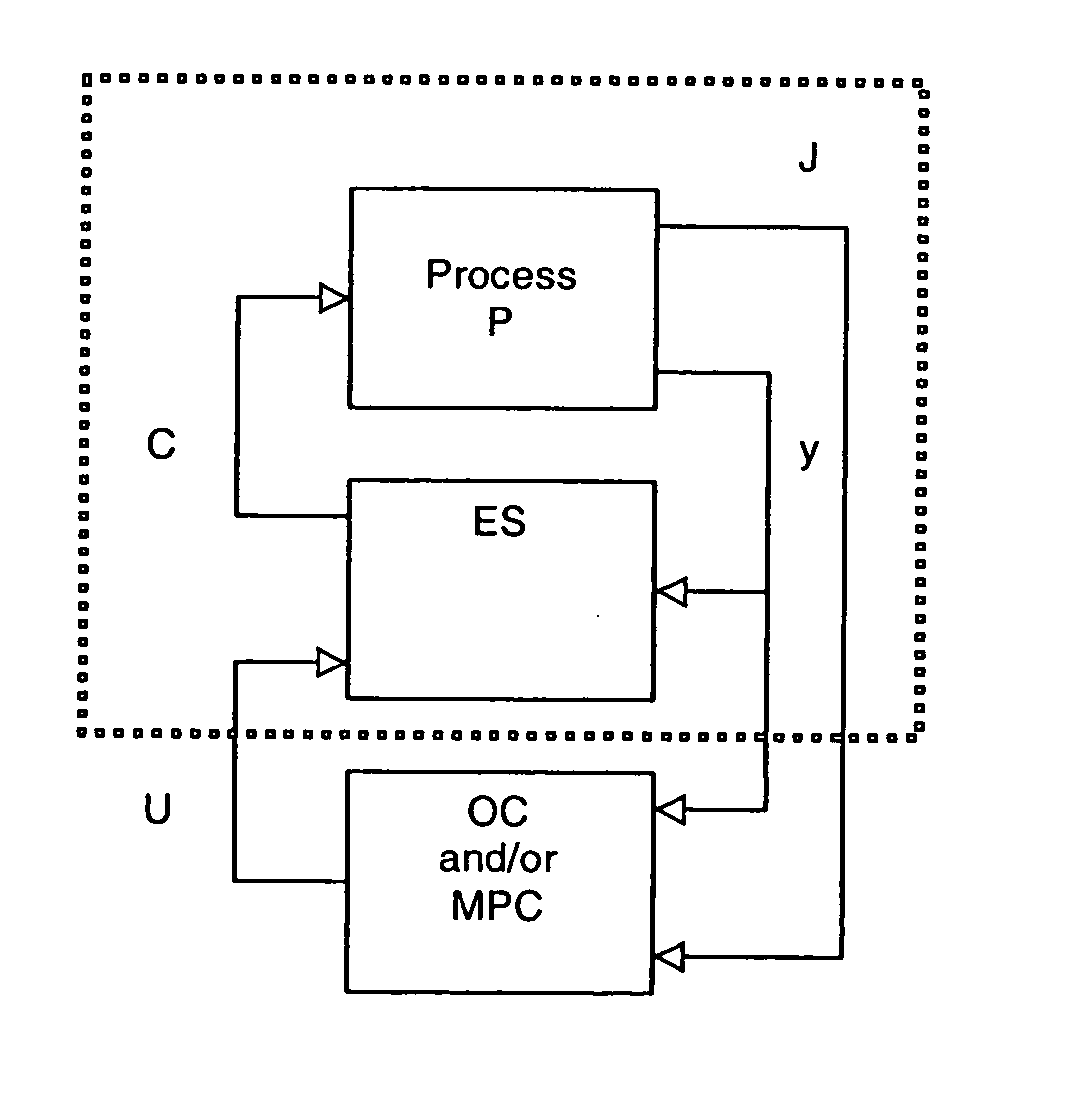
Process control system
PatentInactiveUS20050154476A1
Innovation
- A hybrid process control system that uses mathematical models to select expert system targets based on performance criteria, integrating optimal control and model predictive control techniques to compute these targets, allowing for lower sampling rates and easier model construction.
Safety Standards for AI-Powered Robotic Systems
The integration of AI-powered robotic systems into industrial and consumer applications necessitates comprehensive safety standards that address the unique challenges posed by both robotic foundation models and expert systems in predictive control scenarios. Current safety frameworks must evolve to accommodate the distinct operational characteristics and risk profiles of these two technological approaches.
Robotic foundation models present novel safety considerations due to their emergent behaviors and black-box nature. Unlike traditional expert systems with deterministic rule-based operations, foundation models exhibit probabilistic decision-making processes that can generate unexpected outputs. Safety standards must therefore incorporate continuous monitoring protocols, behavioral boundary definitions, and real-time anomaly detection mechanisms to ensure predictable system responses during critical operations.
Expert systems, while more transparent in their decision-making logic, require safety standards focused on rule validation, knowledge base integrity, and systematic verification procedures. These systems demand rigorous testing protocols to ensure comprehensive coverage of all possible operational scenarios and edge cases that might trigger unsafe behaviors.
The predictive control efficiency aspect introduces additional safety requirements related to system response times, accuracy thresholds, and fail-safe mechanisms. Standards must define acceptable latency limits for safety-critical decisions, establish minimum prediction accuracy requirements, and mandate redundant control pathways to prevent system failures from compromising operational safety.
Emerging safety frameworks emphasize the need for hybrid validation approaches that can assess both deterministic and probabilistic system behaviors. These include formal verification methods for expert system components, statistical validation techniques for foundation model outputs, and integrated testing protocols that evaluate system performance under various operational conditions.
Regulatory bodies are developing adaptive safety standards that can accommodate the rapid evolution of AI technologies while maintaining stringent safety requirements. These frameworks incorporate risk-based assessment methodologies, continuous compliance monitoring, and dynamic safety parameter adjustment capabilities to ensure ongoing system safety as AI models evolve and learn from operational data.
Robotic foundation models present novel safety considerations due to their emergent behaviors and black-box nature. Unlike traditional expert systems with deterministic rule-based operations, foundation models exhibit probabilistic decision-making processes that can generate unexpected outputs. Safety standards must therefore incorporate continuous monitoring protocols, behavioral boundary definitions, and real-time anomaly detection mechanisms to ensure predictable system responses during critical operations.
Expert systems, while more transparent in their decision-making logic, require safety standards focused on rule validation, knowledge base integrity, and systematic verification procedures. These systems demand rigorous testing protocols to ensure comprehensive coverage of all possible operational scenarios and edge cases that might trigger unsafe behaviors.
The predictive control efficiency aspect introduces additional safety requirements related to system response times, accuracy thresholds, and fail-safe mechanisms. Standards must define acceptable latency limits for safety-critical decisions, establish minimum prediction accuracy requirements, and mandate redundant control pathways to prevent system failures from compromising operational safety.
Emerging safety frameworks emphasize the need for hybrid validation approaches that can assess both deterministic and probabilistic system behaviors. These include formal verification methods for expert system components, statistical validation techniques for foundation model outputs, and integrated testing protocols that evaluate system performance under various operational conditions.
Regulatory bodies are developing adaptive safety standards that can accommodate the rapid evolution of AI technologies while maintaining stringent safety requirements. These frameworks incorporate risk-based assessment methodologies, continuous compliance monitoring, and dynamic safety parameter adjustment capabilities to ensure ongoing system safety as AI models evolve and learn from operational data.
Computational Resource Requirements and Optimization
The computational resource requirements for robotic foundation models and expert systems differ significantly in their architecture and operational demands. Foundation models typically require substantial GPU memory and processing power due to their transformer-based architectures, often necessitating multiple high-end GPUs with 16-80GB VRAM for inference tasks. These models demand parallel processing capabilities and high-bandwidth memory access to handle the massive parameter matrices efficiently.
Expert systems, conversely, operate with considerably lower computational overhead, primarily utilizing CPU-based processing for rule evaluation and logical inference. Their memory requirements are typically measured in megabytes rather than gigabytes, making them suitable for deployment on embedded systems and edge devices with limited computational resources.
Optimization strategies for foundation models focus on model compression techniques including quantization, pruning, and knowledge distillation. Dynamic batching and caching mechanisms can reduce inference latency by up to 40% in real-time control scenarios. Hardware-specific optimizations such as TensorRT for NVIDIA GPUs or specialized inference engines like ONNX Runtime provide additional performance gains.
For expert systems, optimization centers on rule compilation and decision tree optimization algorithms. Efficient indexing structures and memoization techniques can accelerate rule matching processes. The deterministic nature of expert systems allows for predictable resource allocation and real-time performance guarantees.
Hybrid approaches are emerging that leverage the strengths of both paradigms. Edge-cloud architectures deploy lightweight expert systems for immediate responses while utilizing foundation models for complex reasoning tasks. This configuration optimizes resource utilization by balancing computational load between local and remote processing capabilities.
Power consumption analysis reveals that expert systems consume 10-100 times less energy than foundation models during operation, making them preferable for battery-powered robotic applications. However, foundation models demonstrate superior scalability across diverse tasks, potentially offering better resource efficiency when handling multiple control objectives simultaneously.
Expert systems, conversely, operate with considerably lower computational overhead, primarily utilizing CPU-based processing for rule evaluation and logical inference. Their memory requirements are typically measured in megabytes rather than gigabytes, making them suitable for deployment on embedded systems and edge devices with limited computational resources.
Optimization strategies for foundation models focus on model compression techniques including quantization, pruning, and knowledge distillation. Dynamic batching and caching mechanisms can reduce inference latency by up to 40% in real-time control scenarios. Hardware-specific optimizations such as TensorRT for NVIDIA GPUs or specialized inference engines like ONNX Runtime provide additional performance gains.
For expert systems, optimization centers on rule compilation and decision tree optimization algorithms. Efficient indexing structures and memoization techniques can accelerate rule matching processes. The deterministic nature of expert systems allows for predictable resource allocation and real-time performance guarantees.
Hybrid approaches are emerging that leverage the strengths of both paradigms. Edge-cloud architectures deploy lightweight expert systems for immediate responses while utilizing foundation models for complex reasoning tasks. This configuration optimizes resource utilization by balancing computational load between local and remote processing capabilities.
Power consumption analysis reveals that expert systems consume 10-100 times less energy than foundation models during operation, making them preferable for battery-powered robotic applications. However, foundation models demonstrate superior scalability across diverse tasks, potentially offering better resource efficiency when handling multiple control objectives simultaneously.
Unlock deeper insights with PatSnap Eureka Quick Research — get a full tech report to explore trends and direct your research. Try now!
Generate Your Research Report Instantly with AI Agent
Supercharge your innovation with PatSnap Eureka AI Agent Platform!