

Robotic grasping vs impedance control: which stabilizes impacts
MAY 8, 20269 MIN READ
Generate Your Research Report Instantly with AI Agent
PatSnap Eureka helps you evaluate technical feasibility & market potential.
Robotic Grasping and Impedance Control Background and Objectives
Robotic manipulation has evolved significantly since the early industrial automation era, transitioning from rigid, pre-programmed systems to adaptive, intelligent platforms capable of handling complex interaction scenarios. The field encompasses two fundamental paradigms that address the critical challenge of stable physical interaction: robotic grasping and impedance control. These approaches represent distinct philosophical and technical methodologies for managing contact forces and ensuring system stability during manipulation tasks.
The historical development of robotic grasping traces back to the 1960s with simple gripper mechanisms, progressing through force-feedback systems in the 1980s to today's sophisticated multi-fingered hands equipped with tactile sensing arrays. Parallel to this evolution, impedance control emerged in the 1980s as a revolutionary framework for managing robot-environment interactions, fundamentally changing how robots handle contact forces and unexpected disturbances.
Current technological trends indicate a convergence toward hybrid systems that integrate both grasping intelligence and impedance regulation. Advanced sensor fusion, machine learning algorithms, and real-time control architectures are enabling robots to dynamically switch between control strategies based on task requirements and environmental conditions. The integration of artificial intelligence has particularly accelerated progress in adaptive grasping strategies and predictive impedance modulation.
The primary technical objective centers on determining which approach provides superior impact stabilization during robotic manipulation tasks. This involves comprehensive evaluation of contact stability, force regulation accuracy, and system robustness under varying operational conditions. The research aims to establish quantitative metrics for comparing grasping-based stabilization against impedance control methodologies.
Secondary objectives include developing unified frameworks that leverage the strengths of both approaches, optimizing control parameters for specific application domains, and establishing design guidelines for next-generation manipulation systems. The ultimate goal involves creating adaptive control architectures that can seamlessly transition between grasping and impedance strategies based on real-time task analysis and environmental feedback, thereby maximizing manipulation performance across diverse operational scenarios.
The historical development of robotic grasping traces back to the 1960s with simple gripper mechanisms, progressing through force-feedback systems in the 1980s to today's sophisticated multi-fingered hands equipped with tactile sensing arrays. Parallel to this evolution, impedance control emerged in the 1980s as a revolutionary framework for managing robot-environment interactions, fundamentally changing how robots handle contact forces and unexpected disturbances.
Current technological trends indicate a convergence toward hybrid systems that integrate both grasping intelligence and impedance regulation. Advanced sensor fusion, machine learning algorithms, and real-time control architectures are enabling robots to dynamically switch between control strategies based on task requirements and environmental conditions. The integration of artificial intelligence has particularly accelerated progress in adaptive grasping strategies and predictive impedance modulation.
The primary technical objective centers on determining which approach provides superior impact stabilization during robotic manipulation tasks. This involves comprehensive evaluation of contact stability, force regulation accuracy, and system robustness under varying operational conditions. The research aims to establish quantitative metrics for comparing grasping-based stabilization against impedance control methodologies.
Secondary objectives include developing unified frameworks that leverage the strengths of both approaches, optimizing control parameters for specific application domains, and establishing design guidelines for next-generation manipulation systems. The ultimate goal involves creating adaptive control architectures that can seamlessly transition between grasping and impedance strategies based on real-time task analysis and environmental feedback, thereby maximizing manipulation performance across diverse operational scenarios.
Market Demand for Stable Robotic Manipulation Systems
The global robotics market is experiencing unprecedented growth driven by increasing demand for automation across manufacturing, logistics, healthcare, and service industries. Stable robotic manipulation systems have emerged as a critical requirement, particularly in applications where robots must interact with dynamic environments and handle delicate or unpredictable objects. The challenge of impact stabilization during robotic grasping operations has become a focal point for industries seeking reliable automated solutions.
Manufacturing sectors demonstrate the highest demand for stable manipulation systems, especially in automotive assembly, electronics production, and precision manufacturing. These industries require robots capable of handling components with varying weights, shapes, and fragility levels while maintaining consistent performance despite environmental disturbances or unexpected contact forces. The ability to stabilize impacts during grasping operations directly correlates with production quality and operational efficiency.
Healthcare and medical device industries represent rapidly expanding market segments for stable robotic manipulation. Surgical robots, rehabilitation devices, and assistive technologies require exceptional stability and safety during human interaction. The demand extends to pharmaceutical manufacturing, where precise handling of sensitive materials and sterile environments necessitates advanced impact stabilization capabilities.
Logistics and warehouse automation sectors are driving significant market expansion, particularly with the growth of e-commerce and automated fulfillment centers. These applications demand robots capable of handling diverse package sizes, weights, and materials while maintaining high throughput rates. Impact stabilization becomes crucial when dealing with fragile goods or operating in high-speed sorting environments.
The service robotics sector, including domestic assistance, elderly care, and hospitality applications, presents emerging opportunities for stable manipulation systems. These environments require robots to interact safely with humans and handle everyday objects with varying properties, making impact stabilization essential for user acceptance and safety compliance.
Market drivers include increasing labor costs, quality consistency requirements, and safety regulations across industries. The growing complexity of automated tasks and the need for robots to operate in unstructured environments further amplify demand for sophisticated manipulation capabilities. Additionally, the integration of artificial intelligence and machine learning technologies is creating opportunities for more adaptive and responsive manipulation systems that can better handle unexpected situations and impacts.
Manufacturing sectors demonstrate the highest demand for stable manipulation systems, especially in automotive assembly, electronics production, and precision manufacturing. These industries require robots capable of handling components with varying weights, shapes, and fragility levels while maintaining consistent performance despite environmental disturbances or unexpected contact forces. The ability to stabilize impacts during grasping operations directly correlates with production quality and operational efficiency.
Healthcare and medical device industries represent rapidly expanding market segments for stable robotic manipulation. Surgical robots, rehabilitation devices, and assistive technologies require exceptional stability and safety during human interaction. The demand extends to pharmaceutical manufacturing, where precise handling of sensitive materials and sterile environments necessitates advanced impact stabilization capabilities.
Logistics and warehouse automation sectors are driving significant market expansion, particularly with the growth of e-commerce and automated fulfillment centers. These applications demand robots capable of handling diverse package sizes, weights, and materials while maintaining high throughput rates. Impact stabilization becomes crucial when dealing with fragile goods or operating in high-speed sorting environments.
The service robotics sector, including domestic assistance, elderly care, and hospitality applications, presents emerging opportunities for stable manipulation systems. These environments require robots to interact safely with humans and handle everyday objects with varying properties, making impact stabilization essential for user acceptance and safety compliance.
Market drivers include increasing labor costs, quality consistency requirements, and safety regulations across industries. The growing complexity of automated tasks and the need for robots to operate in unstructured environments further amplify demand for sophisticated manipulation capabilities. Additionally, the integration of artificial intelligence and machine learning technologies is creating opportunities for more adaptive and responsive manipulation systems that can better handle unexpected situations and impacts.
Current State and Challenges in Impact Stabilization
Impact stabilization in robotic systems represents a critical intersection between control theory and practical manipulation tasks. Current research predominantly focuses on two primary approaches: robotic grasping strategies and impedance control methods. Both approaches aim to mitigate the destabilizing effects of sudden contact forces, yet they operate through fundamentally different mechanisms and face distinct technical limitations.
Robotic grasping approaches for impact stabilization rely heavily on pre-contact planning and grip optimization algorithms. These systems typically employ force-closure analysis and contact point selection to establish stable configurations before impact occurs. However, current grasping methods struggle with dynamic environments where impact characteristics cannot be precisely predicted. The computational overhead required for real-time grasp planning during impact scenarios remains a significant bottleneck, often resulting in delayed responses that compromise stabilization effectiveness.
Impedance control strategies, conversely, focus on modulating the robot's mechanical impedance properties to absorb and dissipate impact energy. Contemporary impedance controllers utilize variable stiffness and damping parameters to create compliant interactions with the environment. Despite theoretical advantages, practical implementations face challenges in parameter tuning and stability guarantees across diverse impact scenarios. The trade-off between compliance and precision control continues to limit widespread adoption in high-performance applications.
A major challenge affecting both approaches is the lack of unified metrics for evaluating impact stabilization performance. Current assessment methods vary significantly across research groups, making comparative analysis difficult. Additionally, most existing solutions are optimized for specific robot platforms or application domains, limiting their generalizability and scalability.
The integration of sensor feedback systems presents another significant hurdle. While force-torque sensors and tactile arrays provide valuable impact detection capabilities, the latency inherent in sensor processing and control loop execution often exceeds the critical time windows required for effective impact response. This temporal constraint particularly affects systems operating in high-speed manipulation tasks.
Furthermore, the majority of current research focuses on single-impact scenarios, while real-world applications frequently involve multiple sequential impacts or continuous contact transitions. The complexity of managing state transitions between different control modes during such scenarios remains largely unresolved, representing a critical gap in current technological capabilities.
Robotic grasping approaches for impact stabilization rely heavily on pre-contact planning and grip optimization algorithms. These systems typically employ force-closure analysis and contact point selection to establish stable configurations before impact occurs. However, current grasping methods struggle with dynamic environments where impact characteristics cannot be precisely predicted. The computational overhead required for real-time grasp planning during impact scenarios remains a significant bottleneck, often resulting in delayed responses that compromise stabilization effectiveness.
Impedance control strategies, conversely, focus on modulating the robot's mechanical impedance properties to absorb and dissipate impact energy. Contemporary impedance controllers utilize variable stiffness and damping parameters to create compliant interactions with the environment. Despite theoretical advantages, practical implementations face challenges in parameter tuning and stability guarantees across diverse impact scenarios. The trade-off between compliance and precision control continues to limit widespread adoption in high-performance applications.
A major challenge affecting both approaches is the lack of unified metrics for evaluating impact stabilization performance. Current assessment methods vary significantly across research groups, making comparative analysis difficult. Additionally, most existing solutions are optimized for specific robot platforms or application domains, limiting their generalizability and scalability.
The integration of sensor feedback systems presents another significant hurdle. While force-torque sensors and tactile arrays provide valuable impact detection capabilities, the latency inherent in sensor processing and control loop execution often exceeds the critical time windows required for effective impact response. This temporal constraint particularly affects systems operating in high-speed manipulation tasks.
Furthermore, the majority of current research focuses on single-impact scenarios, while real-world applications frequently involve multiple sequential impacts or continuous contact transitions. The complexity of managing state transitions between different control modes during such scenarios remains largely unresolved, representing a critical gap in current technological capabilities.
Existing Solutions for Impact Stabilization in Robotics
01 Impedance control algorithms for robotic manipulation
Advanced impedance control algorithms are implemented to regulate the interaction forces between robotic manipulators and their environment. These algorithms adjust the robot's mechanical impedance characteristics to achieve desired force and position responses during grasping and manipulation tasks. The control systems enable robots to adapt their stiffness and damping properties dynamically based on contact conditions and task requirements.- Impedance control algorithms for robotic manipulation: Advanced impedance control methods are employed to regulate the dynamic interaction between robotic manipulators and their environment. These algorithms adjust the robot's mechanical impedance properties to achieve desired force and position responses during grasping and manipulation tasks. The control strategies enable robots to adapt their stiffness and damping characteristics in real-time, improving performance in contact-rich environments.
- Impact stabilization mechanisms in robotic systems: Specialized stabilization techniques are implemented to manage impact forces and vibrations during robotic grasping operations. These mechanisms help maintain system stability when robots encounter sudden contact forces or environmental disturbances. The stabilization methods incorporate feedback control systems that can rapidly respond to impact events and minimize their destabilizing effects on the robotic platform.
- Adaptive grasping control strategies: Intelligent grasping algorithms that automatically adjust grip parameters based on object properties and environmental conditions. These control strategies utilize sensor feedback to optimize grasp stability and force distribution across contact points. The adaptive nature allows robots to handle objects of varying shapes, sizes, and material properties while maintaining secure and stable grasps throughout manipulation tasks.
- Force feedback and tactile sensing integration: Integration of force sensors and tactile feedback systems to enhance robotic grasping precision and control. These sensing technologies provide real-time information about contact forces, surface properties, and grip stability. The feedback data is processed to adjust grasping parameters dynamically, enabling more sophisticated manipulation capabilities and improved object handling performance.
- Multi-degree-of-freedom manipulation control: Coordinated control systems for managing complex robotic manipulators with multiple degrees of freedom during grasping and manipulation tasks. These control architectures coordinate the motion of multiple joints and actuators to achieve precise positioning and orientation control. The systems incorporate kinematic and dynamic models to optimize trajectory planning and execution while maintaining stability throughout the manipulation process.
02 Impact stabilization mechanisms in robotic systems
Specialized mechanisms and control strategies are developed to handle impact forces and stabilize robotic systems during sudden contact events. These systems incorporate shock absorption techniques, force limiting mechanisms, and rapid response control algorithms to prevent damage and maintain system stability when robots encounter unexpected impacts or collisions during operation.Expand Specific Solutions03 Adaptive grasping control with force feedback
Robotic grasping systems utilize force and tactile feedback sensors to implement adaptive control strategies that adjust grip force and finger positioning in real-time. These systems can accommodate objects of varying shapes, sizes, and material properties by continuously monitoring contact forces and adjusting grasping parameters to ensure secure object manipulation without damage.Expand Specific Solutions04 Multi-degree-of-freedom robotic hand control
Complex control systems are designed for multi-fingered robotic hands that coordinate multiple degrees of freedom to achieve dexterous manipulation capabilities. These systems integrate position, velocity, and force control across multiple joints and fingers, enabling sophisticated grasping strategies and in-hand manipulation of objects with human-like dexterity and precision.Expand Specific Solutions05 Compliant robotic systems with variable stiffness
Robotic systems incorporate variable stiffness actuators and compliant mechanisms that can dynamically adjust their mechanical properties during operation. These systems enable robots to switch between rigid and compliant behaviors as needed, providing both precise positioning capabilities and safe interaction with humans and delicate objects through controlled compliance and stiffness modulation.Expand Specific Solutions
Key Players in Robotic Manipulation and Control Systems
The robotic grasping versus impedance control technology landscape represents a rapidly evolving sector within the broader robotics industry, currently in its growth phase with significant market expansion driven by automation demands across manufacturing, healthcare, and service sectors. The market demonstrates substantial scale potential, evidenced by major players like FANUC Corp., YASKAWA Electric Corp., and Honda Motor Co., Ltd. investing heavily in advanced manipulation technologies. Technology maturity varies significantly across applications, with companies like Tokyo Robotics and FRANKA EMIKA GmbH pioneering sophisticated impedance control systems, while established manufacturers such as OMRON Corp., Panasonic Holdings Corp., and Samsung Electronics focus on robust grasping solutions. Research institutions including Beijing Institute of Technology and École Polytechnique Fédérale de Lausanne contribute fundamental advances, while specialized firms like CMR Surgical and MAKO Surgical demonstrate successful clinical applications, indicating the technology's transition from experimental to commercially viable solutions across diverse industrial segments.
FANUC Corp.
Technical Solution: FANUC implements hybrid control strategies that integrate both precise robotic grasping and impedance control for industrial applications. Their robotic systems utilize force-controlled grasping with variable impedance parameters that can be adjusted based on object properties and task requirements. The company's approach focuses on minimizing impact forces through predictive control algorithms that anticipate contact dynamics. Their systems employ multi-modal sensing including vision and force feedback to optimize grasp planning and execution while maintaining compliant behavior during impacts.
Strengths: Proven industrial reliability and extensive force control experience. Weaknesses: Limited flexibility in dynamic environments compared to research-focused solutions.
Honda Motor Co., Ltd.
Technical Solution: Honda's robotics division, particularly through their ASIMO and research platforms, explores the integration of compliant grasping with whole-body impedance control for humanoid applications. Their approach emphasizes coordinated control between grasping forces and body compliance to stabilize impacts during manipulation tasks. The system employs distributed impedance control across multiple joints to absorb and redistribute impact forces, while maintaining precise grasp control. Honda's research focuses on bio-inspired control strategies that mimic human-like compliance during object interaction, enabling more natural and stable grasping behaviors in dynamic environments.
Strengths: Advanced humanoid integration and bio-inspired control approaches. Weaknesses: Primarily research-focused with limited commercial availability of advanced grasping systems.
Core Innovations in Grasping vs Impedance Control
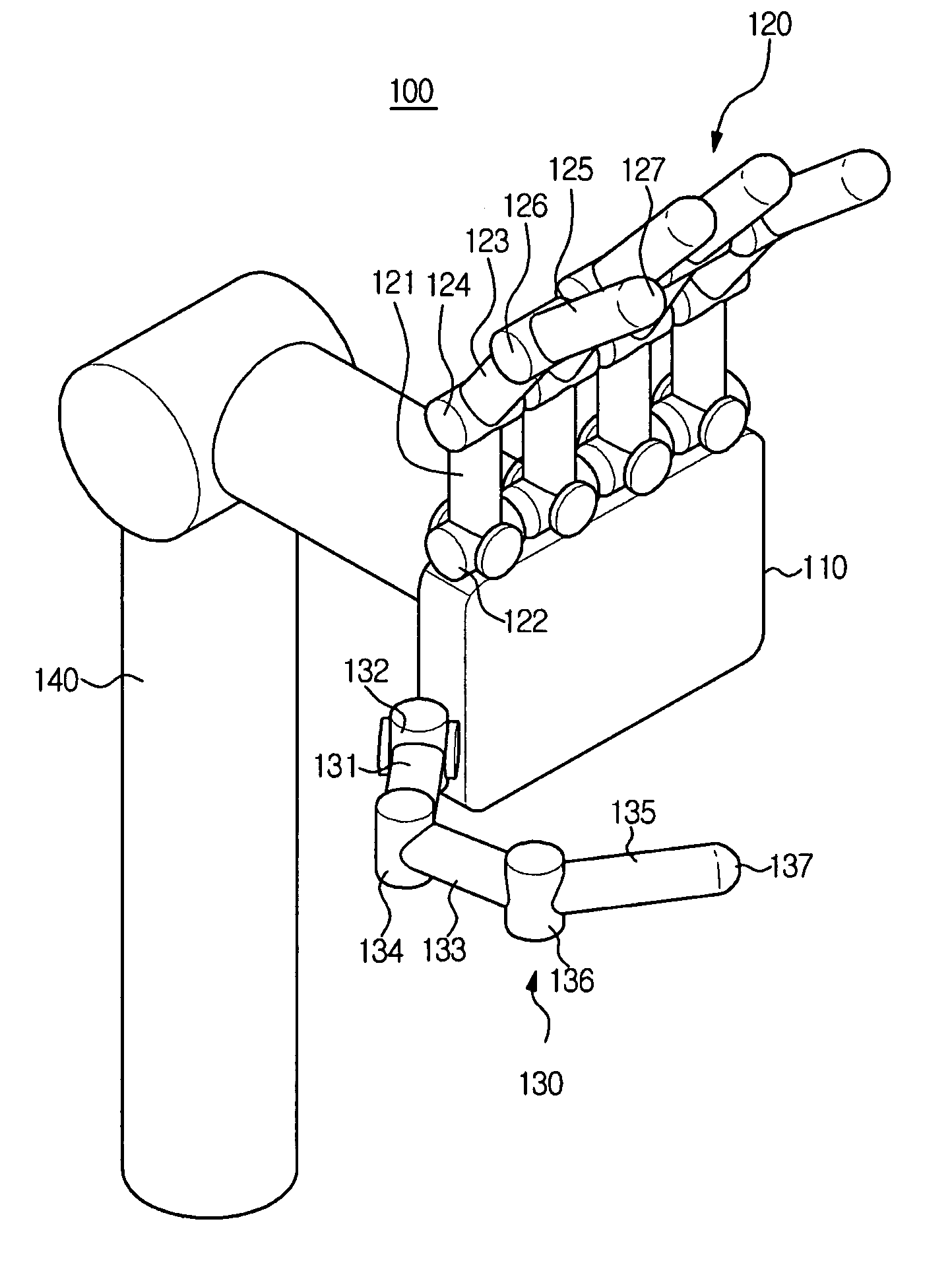
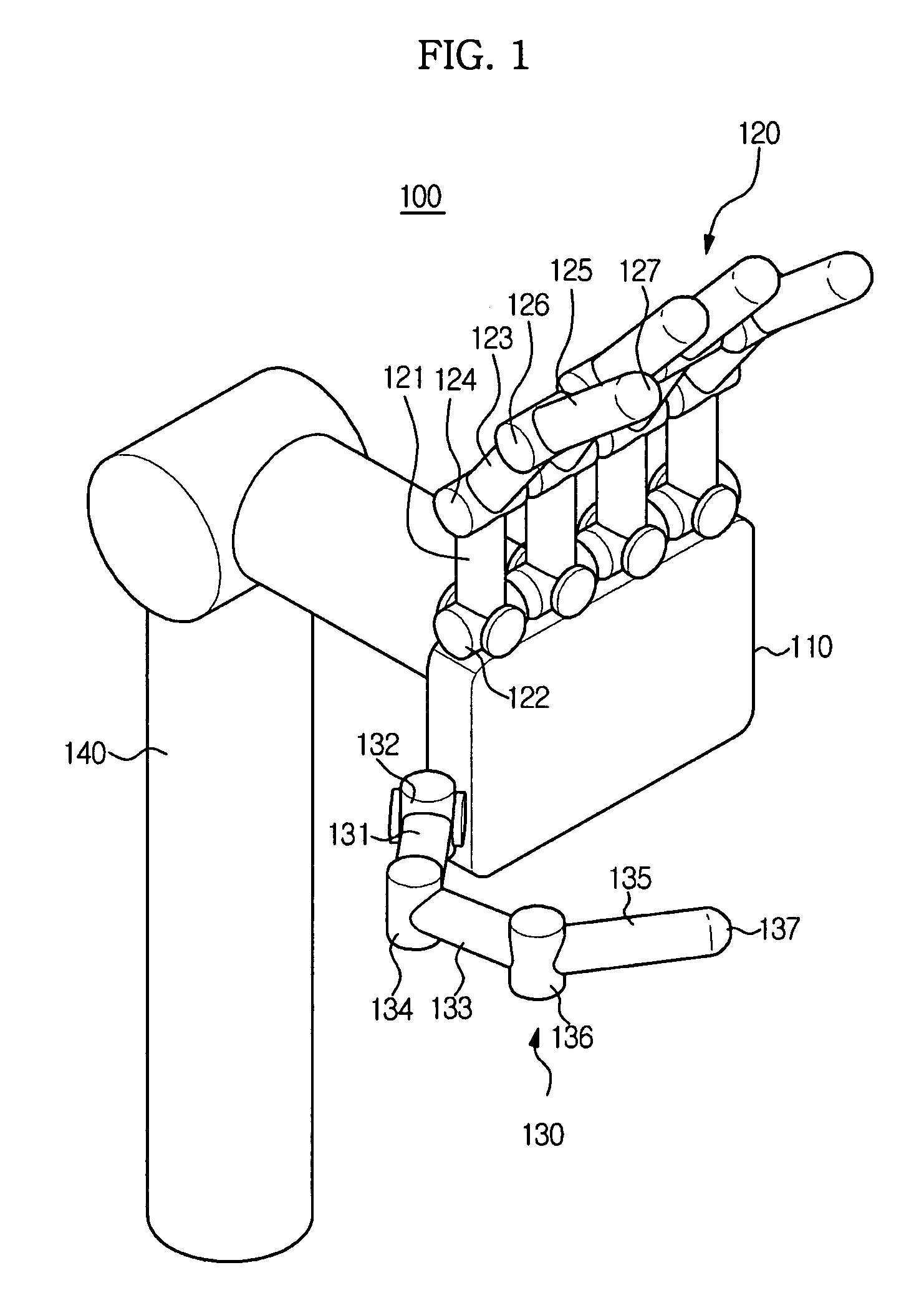
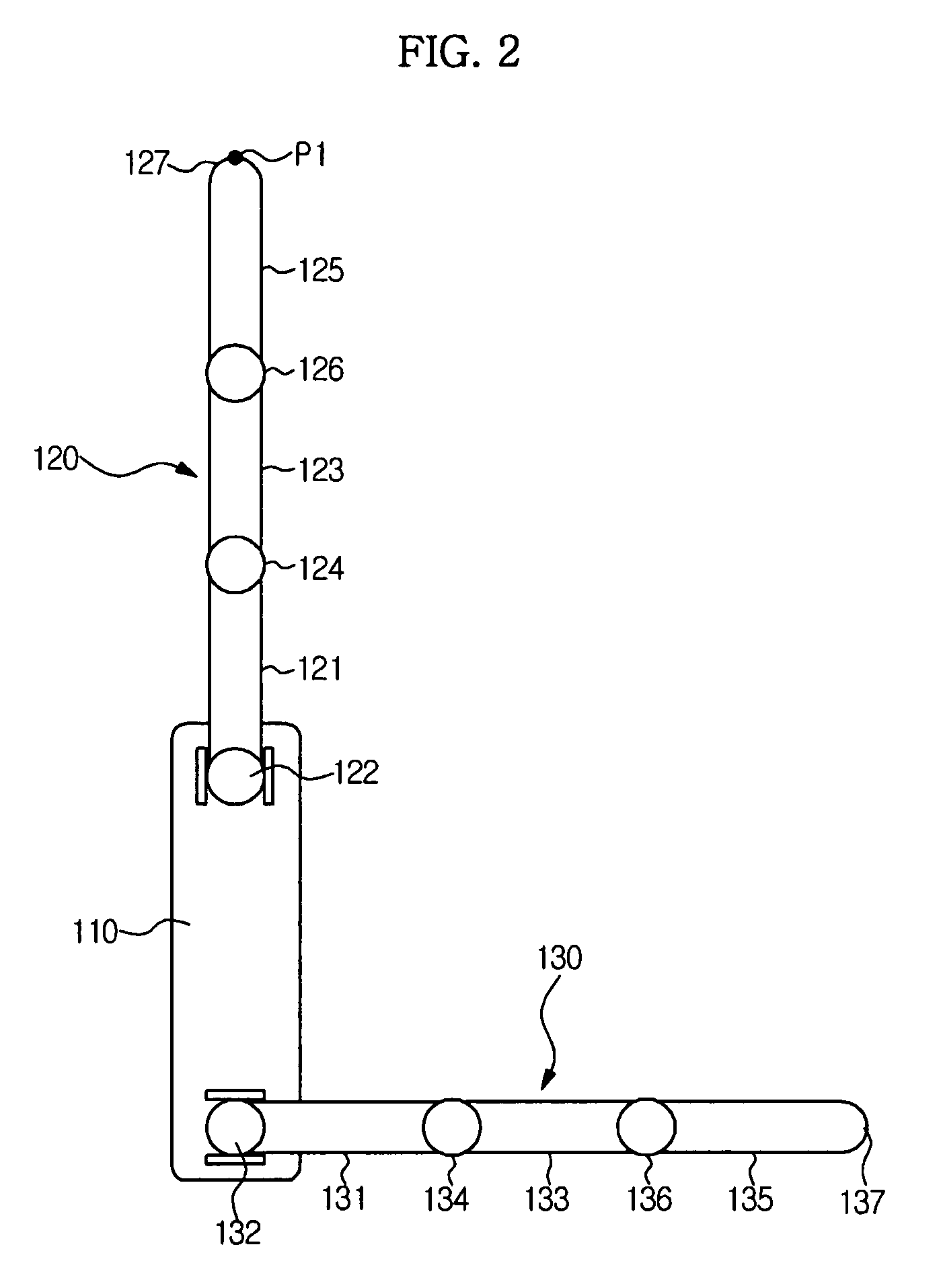
Robot hand and method of controlling the same
PatentActiveUS20100138039A1
Innovation
- A robot hand with a palm and multiple fingers that sets target positions and creates grasp paths using impedance control, allowing the fingers to follow optimal paths, including a quadratic curve based on three target positions, to ensure stable grasping and manipulation of objects, even when the object's shape is not uniform.

Robot control
PatentWO2017163071A1
Innovation
- A method for controlling robot manipulators that measures torques or forces at joints, implements an impedance control algorithm using mass, damper, and spring terms in joint space, and converts desired impedance characteristics into appropriate joint configurations, eliminating the need for end-effector torque/force measurements and separating inverse kinematics from the position control loop.




Safety Standards for Industrial Robotic Systems
Industrial robotic systems operating in environments where grasping and impedance control are critical must adhere to comprehensive safety standards that address impact stabilization and collision mitigation. The International Organization for Standardization (ISO) 10218 series provides fundamental safety requirements for industrial robots, establishing mandatory protocols for force limitation and contact detection during manipulation tasks. These standards specifically address scenarios where robotic grasping operations may result in unexpected impacts with objects, humans, or environmental obstacles.
The safety framework distinguishes between collaborative and non-collaborative robotic operations, with particular emphasis on force and power limitations during grasping sequences. ISO/TS 15066 extends these requirements by defining specific thresholds for transient and quasi-static contact forces, directly relevant to impact scenarios encountered in robotic grasping applications. The standard mandates that robotic systems must incorporate real-time monitoring capabilities to detect deviations from expected force profiles during manipulation tasks.
Risk assessment protocols under ISO 12100 require comprehensive evaluation of potential hazards arising from both successful and failed grasping attempts. These assessments must consider the dynamic interactions between impedance control parameters and impact forces, ensuring that safety systems can respond appropriately to various failure modes. The standards emphasize the importance of fail-safe mechanisms that can immediately halt or modify robotic operations when impact forces exceed predetermined safety thresholds.
Compliance verification procedures mandate rigorous testing of impact stabilization mechanisms under various operational conditions. Safety-rated monitoring systems must continuously evaluate the effectiveness of both grasping strategies and impedance control algorithms in maintaining safe operational parameters. These systems must demonstrate capability to distinguish between intentional contact forces during normal grasping operations and potentially hazardous impact scenarios.
Emergency stop systems and protective measures must be designed to account for the specific characteristics of robotic grasping operations, including the potential for sudden load changes and unexpected contact events. The standards require that safety systems maintain effectiveness regardless of whether impact stabilization is achieved through grasping force modulation or impedance control adjustments, ensuring comprehensive protection across different operational strategies.
The safety framework distinguishes between collaborative and non-collaborative robotic operations, with particular emphasis on force and power limitations during grasping sequences. ISO/TS 15066 extends these requirements by defining specific thresholds for transient and quasi-static contact forces, directly relevant to impact scenarios encountered in robotic grasping applications. The standard mandates that robotic systems must incorporate real-time monitoring capabilities to detect deviations from expected force profiles during manipulation tasks.
Risk assessment protocols under ISO 12100 require comprehensive evaluation of potential hazards arising from both successful and failed grasping attempts. These assessments must consider the dynamic interactions between impedance control parameters and impact forces, ensuring that safety systems can respond appropriately to various failure modes. The standards emphasize the importance of fail-safe mechanisms that can immediately halt or modify robotic operations when impact forces exceed predetermined safety thresholds.
Compliance verification procedures mandate rigorous testing of impact stabilization mechanisms under various operational conditions. Safety-rated monitoring systems must continuously evaluate the effectiveness of both grasping strategies and impedance control algorithms in maintaining safe operational parameters. These systems must demonstrate capability to distinguish between intentional contact forces during normal grasping operations and potentially hazardous impact scenarios.
Emergency stop systems and protective measures must be designed to account for the specific characteristics of robotic grasping operations, including the potential for sudden load changes and unexpected contact events. The standards require that safety systems maintain effectiveness regardless of whether impact stabilization is achieved through grasping force modulation or impedance control adjustments, ensuring comprehensive protection across different operational strategies.
Human-Robot Interaction Safety Considerations
Human-robot interaction safety represents a critical consideration when evaluating the effectiveness of robotic grasping versus impedance control in impact stabilization scenarios. The fundamental safety paradigm requires that robots operating in shared workspaces must minimize potential harm to human operators while maintaining operational efficiency. This dual requirement creates complex engineering challenges that directly influence the selection between grasping-based and impedance-based control strategies.
Physical safety protocols in human-robot collaborative environments establish strict force and velocity limitations that significantly impact control system design. When robots encounter unexpected impacts during manipulation tasks, the chosen control strategy must ensure that reaction forces and subsequent movements remain within safe operational boundaries. Grasping control systems typically exhibit more rigid responses to disturbances, potentially generating higher peak forces during impact events, while impedance control offers inherently compliant behavior that can better absorb and dissipate impact energy.
Cognitive safety considerations encompass the predictability and transparency of robotic behavior during impact scenarios. Human operators must be able to anticipate and understand robot responses to maintain situational awareness and trust. Impedance control systems often provide more intuitive and human-like responses to external forces, making robot behavior more predictable for human collaborators. Conversely, grasping control may produce sudden grip adjustments or release behaviors that could surprise nearby operators.
Emergency response protocols must account for the different failure modes associated with each control approach. Grasping systems may experience catastrophic grip failures during impacts, potentially causing objects to be ejected at high velocities. Impedance control systems, while generally more compliant, may exhibit instability under certain conditions, leading to oscillatory behaviors that could pose risks to nearby humans.
Regulatory compliance frameworks increasingly emphasize the importance of demonstrable safety measures in collaborative robotics applications. International standards such as ISO 10218 and ISO/TS 15066 provide specific guidelines for force and pressure limitations in human-robot interaction scenarios. These standards directly influence the design parameters for both grasping and impedance control systems, requiring careful consideration of contact forces, approach velocities, and reaction times during impact events.
The integration of advanced sensing technologies, including force-torque sensors, proximity detectors, and vision systems, plays a crucial role in enhancing safety performance for both control strategies. These sensors enable real-time monitoring of interaction forces and environmental conditions, allowing for rapid adaptation of control parameters to maintain safe operation during unexpected impact scenarios.
Physical safety protocols in human-robot collaborative environments establish strict force and velocity limitations that significantly impact control system design. When robots encounter unexpected impacts during manipulation tasks, the chosen control strategy must ensure that reaction forces and subsequent movements remain within safe operational boundaries. Grasping control systems typically exhibit more rigid responses to disturbances, potentially generating higher peak forces during impact events, while impedance control offers inherently compliant behavior that can better absorb and dissipate impact energy.
Cognitive safety considerations encompass the predictability and transparency of robotic behavior during impact scenarios. Human operators must be able to anticipate and understand robot responses to maintain situational awareness and trust. Impedance control systems often provide more intuitive and human-like responses to external forces, making robot behavior more predictable for human collaborators. Conversely, grasping control may produce sudden grip adjustments or release behaviors that could surprise nearby operators.
Emergency response protocols must account for the different failure modes associated with each control approach. Grasping systems may experience catastrophic grip failures during impacts, potentially causing objects to be ejected at high velocities. Impedance control systems, while generally more compliant, may exhibit instability under certain conditions, leading to oscillatory behaviors that could pose risks to nearby humans.
Regulatory compliance frameworks increasingly emphasize the importance of demonstrable safety measures in collaborative robotics applications. International standards such as ISO 10218 and ISO/TS 15066 provide specific guidelines for force and pressure limitations in human-robot interaction scenarios. These standards directly influence the design parameters for both grasping and impedance control systems, requiring careful consideration of contact forces, approach velocities, and reaction times during impact events.
The integration of advanced sensing technologies, including force-torque sensors, proximity detectors, and vision systems, plays a crucial role in enhancing safety performance for both control strategies. These sensors enable real-time monitoring of interaction forces and environmental conditions, allowing for rapid adaptation of control parameters to maintain safe operation during unexpected impact scenarios.
Unlock deeper insights with PatSnap Eureka Quick Research — get a full tech report to explore trends and direct your research. Try now!
Generate Your Research Report Instantly with AI Agent
Supercharge your innovation with PatSnap Eureka AI Agent Platform!