

Using Graph Neural Networks for Real-Time Traffic Control
APR 17, 20269 MIN READ
Generate Your Research Report Instantly with AI Agent
Patsnap Eureka helps you evaluate technical feasibility & market potential.
GNN Traffic Control Background and Objectives
Traffic control systems have evolved significantly from simple timer-based traffic lights to sophisticated adaptive systems capable of responding to real-time conditions. Traditional approaches relied on predetermined signal timing patterns or basic sensor feedback mechanisms, which often proved inadequate for handling the dynamic and complex nature of modern urban traffic flows. The emergence of intelligent transportation systems introduced more advanced methodologies, including fuzzy logic controllers, reinforcement learning algorithms, and optimization-based approaches.
The integration of Graph Neural Networks into traffic control represents a paradigm shift in how transportation networks are modeled and managed. Unlike conventional methods that treat intersections as isolated entities, GNN-based approaches recognize traffic networks as interconnected graph structures where nodes represent intersections or road segments, and edges capture the relationships and dependencies between them. This graph-centric perspective enables more holistic and coordinated traffic management strategies.
Current technological trends indicate a growing convergence of artificial intelligence, Internet of Things sensors, and edge computing capabilities in traffic management systems. The proliferation of connected vehicles, smart infrastructure, and high-resolution traffic monitoring devices generates unprecedented volumes of real-time data. This data richness, combined with advances in deep learning architectures, creates opportunities for more sophisticated traffic control algorithms that can process complex spatial-temporal patterns.
The primary objective of implementing GNN-based real-time traffic control is to achieve system-wide optimization rather than localized improvements. Traditional traffic control systems often suffer from the "selfish intersection" problem, where individual intersections optimize their own performance without considering network-wide effects. GNNs address this limitation by enabling message passing between connected nodes, allowing each intersection to make decisions based on both local conditions and broader network state information.
Key technical objectives include minimizing overall network delay, reducing fuel consumption and emissions, improving traffic flow stability, and enhancing system adaptability to unexpected events such as accidents or special events. The real-time aspect is crucial, as traffic conditions can change rapidly, requiring control decisions to be made within strict time constraints typically measured in seconds or sub-seconds.
Another critical objective involves scalability and generalizability across different network topologies and traffic patterns. Effective GNN-based traffic control systems must demonstrate robust performance across various urban configurations, from dense city centers with complex intersection geometries to suburban areas with simpler grid-like structures. This requires developing architectures that can learn transferable representations and adapt to diverse operational environments without extensive retraining.
The integration of Graph Neural Networks into traffic control represents a paradigm shift in how transportation networks are modeled and managed. Unlike conventional methods that treat intersections as isolated entities, GNN-based approaches recognize traffic networks as interconnected graph structures where nodes represent intersections or road segments, and edges capture the relationships and dependencies between them. This graph-centric perspective enables more holistic and coordinated traffic management strategies.
Current technological trends indicate a growing convergence of artificial intelligence, Internet of Things sensors, and edge computing capabilities in traffic management systems. The proliferation of connected vehicles, smart infrastructure, and high-resolution traffic monitoring devices generates unprecedented volumes of real-time data. This data richness, combined with advances in deep learning architectures, creates opportunities for more sophisticated traffic control algorithms that can process complex spatial-temporal patterns.
The primary objective of implementing GNN-based real-time traffic control is to achieve system-wide optimization rather than localized improvements. Traditional traffic control systems often suffer from the "selfish intersection" problem, where individual intersections optimize their own performance without considering network-wide effects. GNNs address this limitation by enabling message passing between connected nodes, allowing each intersection to make decisions based on both local conditions and broader network state information.
Key technical objectives include minimizing overall network delay, reducing fuel consumption and emissions, improving traffic flow stability, and enhancing system adaptability to unexpected events such as accidents or special events. The real-time aspect is crucial, as traffic conditions can change rapidly, requiring control decisions to be made within strict time constraints typically measured in seconds or sub-seconds.
Another critical objective involves scalability and generalizability across different network topologies and traffic patterns. Effective GNN-based traffic control systems must demonstrate robust performance across various urban configurations, from dense city centers with complex intersection geometries to suburban areas with simpler grid-like structures. This requires developing architectures that can learn transferable representations and adapt to diverse operational environments without extensive retraining.
Market Demand for Intelligent Traffic Management Systems
The global intelligent traffic management systems market is experiencing unprecedented growth driven by rapid urbanization and increasing vehicle density in metropolitan areas. Urban populations worldwide are projected to reach nearly 70% by 2050, creating immense pressure on existing transportation infrastructure. This demographic shift necessitates sophisticated traffic control solutions that can dynamically adapt to real-time conditions and optimize traffic flow across complex urban networks.
Traditional traffic management approaches are proving inadequate for handling the complexity of modern transportation challenges. Cities are grappling with congestion costs that significantly impact economic productivity, while environmental concerns regarding emissions from idling vehicles are intensifying regulatory pressure for more efficient traffic systems. The convergence of these factors has created a compelling market demand for intelligent solutions that can process vast amounts of real-time data and make instantaneous optimization decisions.
The emergence of smart city initiatives has further accelerated market demand for advanced traffic management technologies. Government investments in digital infrastructure and IoT deployment are creating favorable conditions for implementing sophisticated traffic control systems. These initiatives recognize that intelligent traffic management is fundamental to achieving broader smart city objectives, including reduced emissions, improved quality of life, and enhanced economic competitiveness.
Connected and autonomous vehicle adoption is reshaping market requirements for traffic management systems. As vehicle-to-infrastructure communication becomes more prevalent, there is growing demand for traffic control systems capable of processing and responding to real-time vehicle data. This technological evolution requires traffic management platforms that can handle complex, multi-dimensional data relationships and make split-second decisions across interconnected traffic networks.
The market is also responding to increasing expectations for data-driven decision making in urban planning and traffic optimization. Municipal authorities are seeking solutions that not only manage current traffic conditions but also provide predictive analytics and long-term optimization insights. This demand extends beyond basic traffic signal control to comprehensive network-wide optimization that considers multiple variables simultaneously, including pedestrian flows, public transportation schedules, and special events.
Emergency response optimization represents another critical market driver, as cities recognize the life-saving potential of intelligent traffic systems that can automatically clear emergency vehicle routes and coordinate multi-agency responses during critical incidents.
Traditional traffic management approaches are proving inadequate for handling the complexity of modern transportation challenges. Cities are grappling with congestion costs that significantly impact economic productivity, while environmental concerns regarding emissions from idling vehicles are intensifying regulatory pressure for more efficient traffic systems. The convergence of these factors has created a compelling market demand for intelligent solutions that can process vast amounts of real-time data and make instantaneous optimization decisions.
The emergence of smart city initiatives has further accelerated market demand for advanced traffic management technologies. Government investments in digital infrastructure and IoT deployment are creating favorable conditions for implementing sophisticated traffic control systems. These initiatives recognize that intelligent traffic management is fundamental to achieving broader smart city objectives, including reduced emissions, improved quality of life, and enhanced economic competitiveness.
Connected and autonomous vehicle adoption is reshaping market requirements for traffic management systems. As vehicle-to-infrastructure communication becomes more prevalent, there is growing demand for traffic control systems capable of processing and responding to real-time vehicle data. This technological evolution requires traffic management platforms that can handle complex, multi-dimensional data relationships and make split-second decisions across interconnected traffic networks.
The market is also responding to increasing expectations for data-driven decision making in urban planning and traffic optimization. Municipal authorities are seeking solutions that not only manage current traffic conditions but also provide predictive analytics and long-term optimization insights. This demand extends beyond basic traffic signal control to comprehensive network-wide optimization that considers multiple variables simultaneously, including pedestrian flows, public transportation schedules, and special events.
Emergency response optimization represents another critical market driver, as cities recognize the life-saving potential of intelligent traffic systems that can automatically clear emergency vehicle routes and coordinate multi-agency responses during critical incidents.
Current State and Challenges of GNN in Traffic Control
Graph Neural Networks have emerged as a promising paradigm for real-time traffic control systems, leveraging their ability to model complex spatial-temporal relationships inherent in transportation networks. Current implementations demonstrate significant potential in capturing traffic flow dynamics, intersection dependencies, and route optimization challenges that traditional control methods struggle to address effectively.
The state-of-the-art GNN architectures for traffic control primarily focus on Graph Convolutional Networks (GCNs) and Graph Attention Networks (GATs). These models excel at processing traffic data from interconnected road segments, traffic lights, and sensor networks. Recent deployments show improved signal timing optimization, with some systems achieving 15-20% reduction in average waiting times compared to conventional adaptive control systems.
However, several critical challenges persist in current GNN-based traffic control implementations. Computational complexity remains a primary concern, as real-time processing requirements demand sub-second response times while handling large-scale urban networks with thousands of nodes. Current hardware limitations often force compromises between model sophistication and processing speed, limiting deployment scalability.
Data quality and availability present another significant obstacle. GNN models require comprehensive, high-frequency traffic data from multiple sources, including loop detectors, cameras, and GPS tracking systems. Inconsistent data collection, sensor failures, and privacy constraints create substantial gaps that affect model reliability and prediction accuracy.
The dynamic nature of traffic patterns poses additional challenges for GNN stability. Current models often struggle with sudden traffic disruptions, special events, or weather-related changes that deviate from training data patterns. Model generalization across different urban environments and traffic cultures remains limited, requiring extensive retraining for new deployments.
Integration with existing traffic management infrastructure represents a practical barrier. Legacy systems often lack the computational resources and communication protocols necessary for GNN implementation. The transition from rule-based to learning-based control systems requires significant investment in hardware upgrades and staff training.
Furthermore, interpretability and safety validation remain critical concerns. Traffic authorities require transparent decision-making processes and fail-safe mechanisms that current GNN models struggle to provide adequately, limiting widespread adoption in safety-critical applications.
The state-of-the-art GNN architectures for traffic control primarily focus on Graph Convolutional Networks (GCNs) and Graph Attention Networks (GATs). These models excel at processing traffic data from interconnected road segments, traffic lights, and sensor networks. Recent deployments show improved signal timing optimization, with some systems achieving 15-20% reduction in average waiting times compared to conventional adaptive control systems.
However, several critical challenges persist in current GNN-based traffic control implementations. Computational complexity remains a primary concern, as real-time processing requirements demand sub-second response times while handling large-scale urban networks with thousands of nodes. Current hardware limitations often force compromises between model sophistication and processing speed, limiting deployment scalability.
Data quality and availability present another significant obstacle. GNN models require comprehensive, high-frequency traffic data from multiple sources, including loop detectors, cameras, and GPS tracking systems. Inconsistent data collection, sensor failures, and privacy constraints create substantial gaps that affect model reliability and prediction accuracy.
The dynamic nature of traffic patterns poses additional challenges for GNN stability. Current models often struggle with sudden traffic disruptions, special events, or weather-related changes that deviate from training data patterns. Model generalization across different urban environments and traffic cultures remains limited, requiring extensive retraining for new deployments.
Integration with existing traffic management infrastructure represents a practical barrier. Legacy systems often lack the computational resources and communication protocols necessary for GNN implementation. The transition from rule-based to learning-based control systems requires significant investment in hardware upgrades and staff training.
Furthermore, interpretability and safety validation remain critical concerns. Traffic authorities require transparent decision-making processes and fail-safe mechanisms that current GNN models struggle to provide adequately, limiting widespread adoption in safety-critical applications.
Existing GNN Solutions for Real-Time Traffic Control
01 GNN-based predictive control systems
Graph Neural Networks are employed to develop predictive control systems that can model complex dynamic relationships in real-time applications. These systems utilize the graph structure to represent interconnected components and their dependencies, enabling accurate prediction of system states and optimal control actions. The GNN architecture processes temporal and spatial information simultaneously, making it suitable for applications requiring fast decision-making based on system topology and dynamics.- GNN-based predictive control systems: Graph Neural Networks are employed to develop predictive control systems that can model complex dynamic relationships in real-time applications. These systems utilize the graph structure to represent interconnected components and their dependencies, enabling more accurate predictions of system behavior. The GNN architecture processes temporal and spatial information simultaneously, allowing for proactive control decisions that anticipate future states based on current observations and historical patterns.
- Real-time optimization using graph representations: This approach leverages graph-based representations to perform real-time optimization of control parameters in complex systems. The neural network processes the graph structure to identify optimal control strategies by analyzing the relationships between different system components. The method enables rapid computation of control actions while maintaining system stability and performance constraints, making it suitable for applications requiring immediate response to changing conditions.
- Distributed control with graph neural architectures: Graph Neural Networks facilitate distributed control strategies where multiple agents or subsystems coordinate their actions through graph-based communication. The architecture enables each node in the network to make local control decisions while considering global system objectives. This distributed approach improves scalability and robustness, as the system can continue operating even when individual components fail or communication links are disrupted.
- Adaptive learning for dynamic control environments: These systems implement adaptive learning mechanisms that allow the Graph Neural Network to continuously update its control policies based on real-time feedback and changing environmental conditions. The network architecture incorporates online learning capabilities that refine control strategies without requiring complete retraining. This adaptability ensures that the control system remains effective even as system dynamics evolve or unexpected disturbances occur.
- Integration of GNNs with traditional control frameworks: This approach combines Graph Neural Networks with established control methodologies to create hybrid systems that leverage both data-driven learning and model-based control principles. The integration allows for the incorporation of domain knowledge and physical constraints while benefiting from the pattern recognition capabilities of neural networks. These hybrid frameworks provide enhanced reliability and interpretability compared to purely learning-based approaches, making them more suitable for safety-critical applications.
02 Real-time optimization using graph-based learning
Implementation of graph-based learning algorithms for real-time optimization of control parameters in dynamic systems. The approach leverages the ability of neural networks to learn from graph-structured data, capturing relationships between different control variables and system components. This enables adaptive control strategies that can respond to changing conditions while maintaining system stability and performance objectives.Expand Specific Solutions03 Distributed control with graph neural architectures
Application of graph neural architectures for distributed control systems where multiple agents or subsystems need to coordinate their actions. The graph structure naturally represents the communication topology and interdependencies between distributed components. This approach enables scalable real-time control solutions that can handle large-scale systems by processing local information while considering global system objectives through message passing mechanisms.Expand Specific Solutions04 Adaptive control through graph representation learning
Development of adaptive control mechanisms that utilize graph representation learning to automatically adjust control strategies based on system behavior and environmental changes. The neural network learns to extract relevant features from the graph-structured system representation, enabling the controller to adapt to varying operating conditions without explicit reprogramming. This approach is particularly effective for systems with time-varying dynamics or uncertain parameters.Expand Specific Solutions05 Integration of GNN with traditional control frameworks
Hybrid approaches that combine Graph Neural Networks with conventional control methods to enhance real-time control performance. These integrated systems leverage the learning capabilities of neural networks while maintaining the stability guarantees and interpretability of classical control theory. The graph-based neural component can handle complex nonlinear relationships and uncertainties, while traditional control elements ensure robust operation and safety constraints.Expand Specific Solutions
Key Players in GNN-Based Traffic Management Industry
The real-time traffic control using Graph Neural Networks represents an emerging technology sector in the early growth stage, with significant market potential driven by increasing urbanization and smart city initiatives. The market is experiencing rapid expansion as municipalities worldwide invest in intelligent transportation systems, creating substantial opportunities for technology providers. The competitive landscape features a diverse ecosystem spanning automotive giants like Toyota Motor Corp. and Robert Bosch GmbH, telecommunications leaders including Huawei Technologies and QUALCOMM, specialized mobility solution providers such as Mobileye Vision Technologies and HERE Global BV, and industrial technology companies like Siemens AG and ZF Friedrichshafen AG. Technology maturity varies significantly across players, with established automotive and telecommunications companies leveraging existing infrastructure capabilities, while emerging specialists like Zhongguancun Science City Urban Brain focus specifically on urban intelligence solutions. Academic institutions including Carnegie Mellon University, McGill University, and various Chinese universities are driving fundamental research advances, indicating strong theoretical foundations supporting practical implementations across this rapidly evolving technological domain.
Robert Bosch GmbH
Technical Solution: Bosch has implemented GNN algorithms for intersection management systems that leverage their automotive sensor expertise. Their approach uses Graph Attention Networks (GAT) to prioritize critical traffic scenarios, such as emergency vehicle routing and pedestrian safety. The system integrates with existing traffic infrastructure through IoT sensors and V2X communication protocols. Bosch's solution focuses on cooperative traffic management, where connected vehicles share real-time data to optimize traffic flow patterns. Their GNN models process multi-modal transportation data including public transit, private vehicles, and pedestrian traffic to create holistic traffic control strategies with response times under 200 milliseconds.
Strengths: Extensive automotive industry experience, strong V2X integration capabilities, proven sensor technology. Weaknesses: Limited to automotive-focused scenarios, requires significant infrastructure upgrades.
Siemens AG Österreich
Technical Solution: Siemens has implemented GNN-based intelligent traffic systems as part of their smart infrastructure portfolio, focusing on urban traffic optimization and public transportation integration. Their solution uses Graph Convolutional Networks to model complex traffic scenarios across multiple intersections, incorporating real-time data from traffic cameras, induction loops, and connected vehicles. The system provides adaptive traffic signal control with machine learning capabilities that improve over time through continuous data analysis. Siemens' approach emphasizes integration with existing traffic management infrastructure and supports both centralized and distributed processing architectures. Their GNN implementation includes predictive modeling for traffic demand forecasting and emergency response optimization, achieving significant improvements in traffic flow efficiency and reduced waiting times.
Strengths: Extensive traffic infrastructure experience, proven smart city solutions, strong industrial automation background. Weaknesses: Traditional approach may limit innovation speed, complex legacy system integration challenges.
Core GNN Innovations for Traffic Optimization
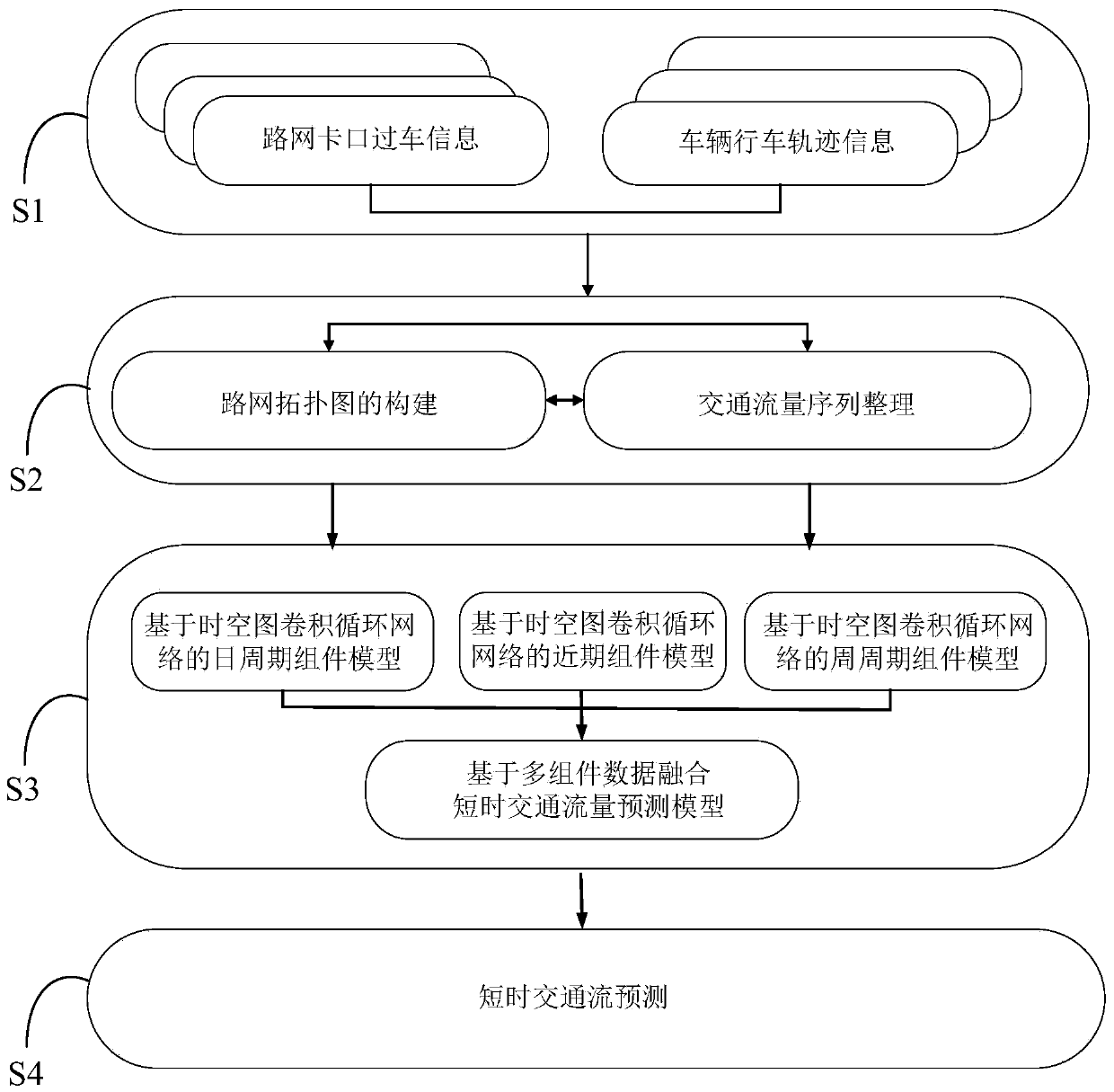
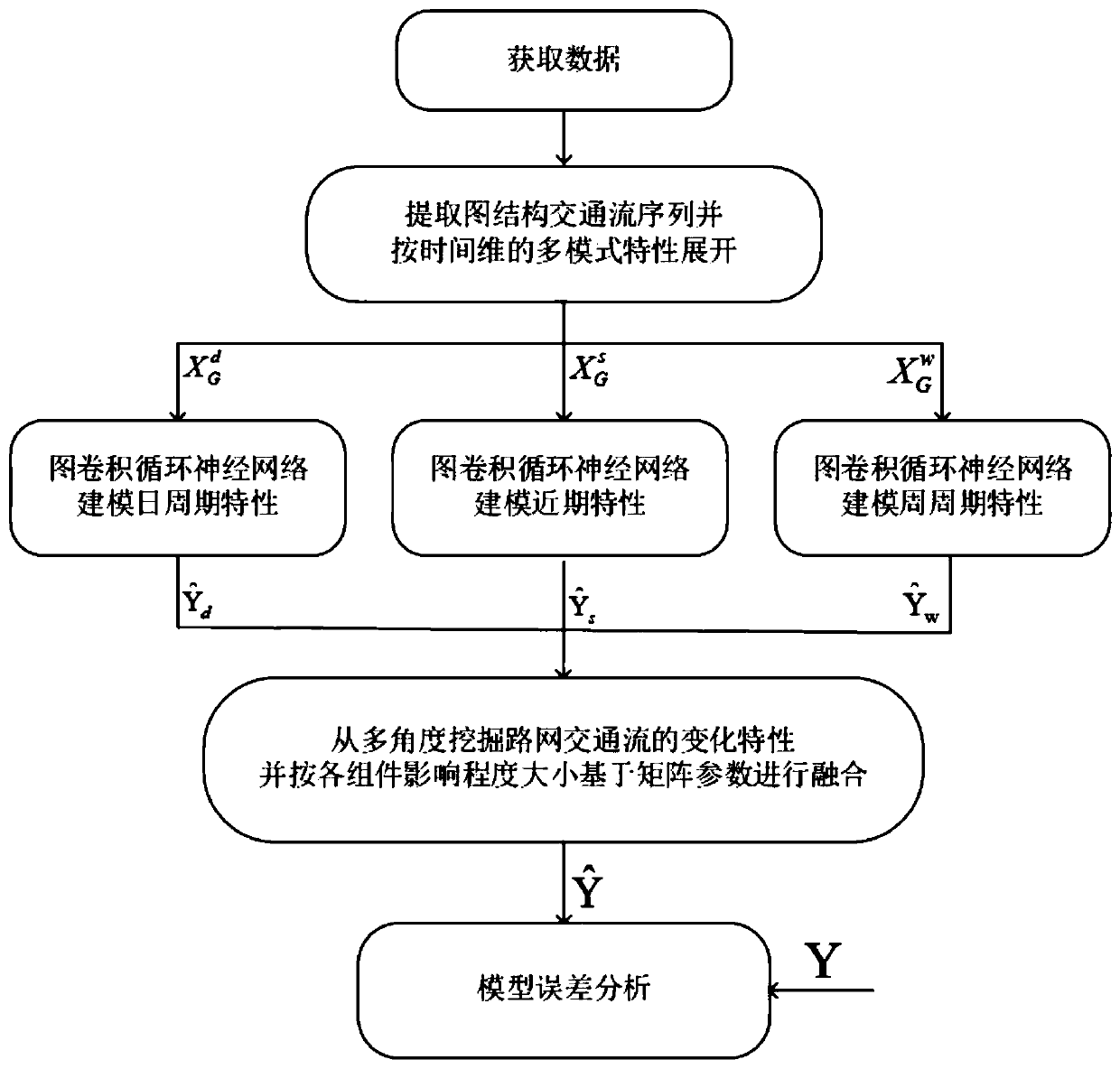
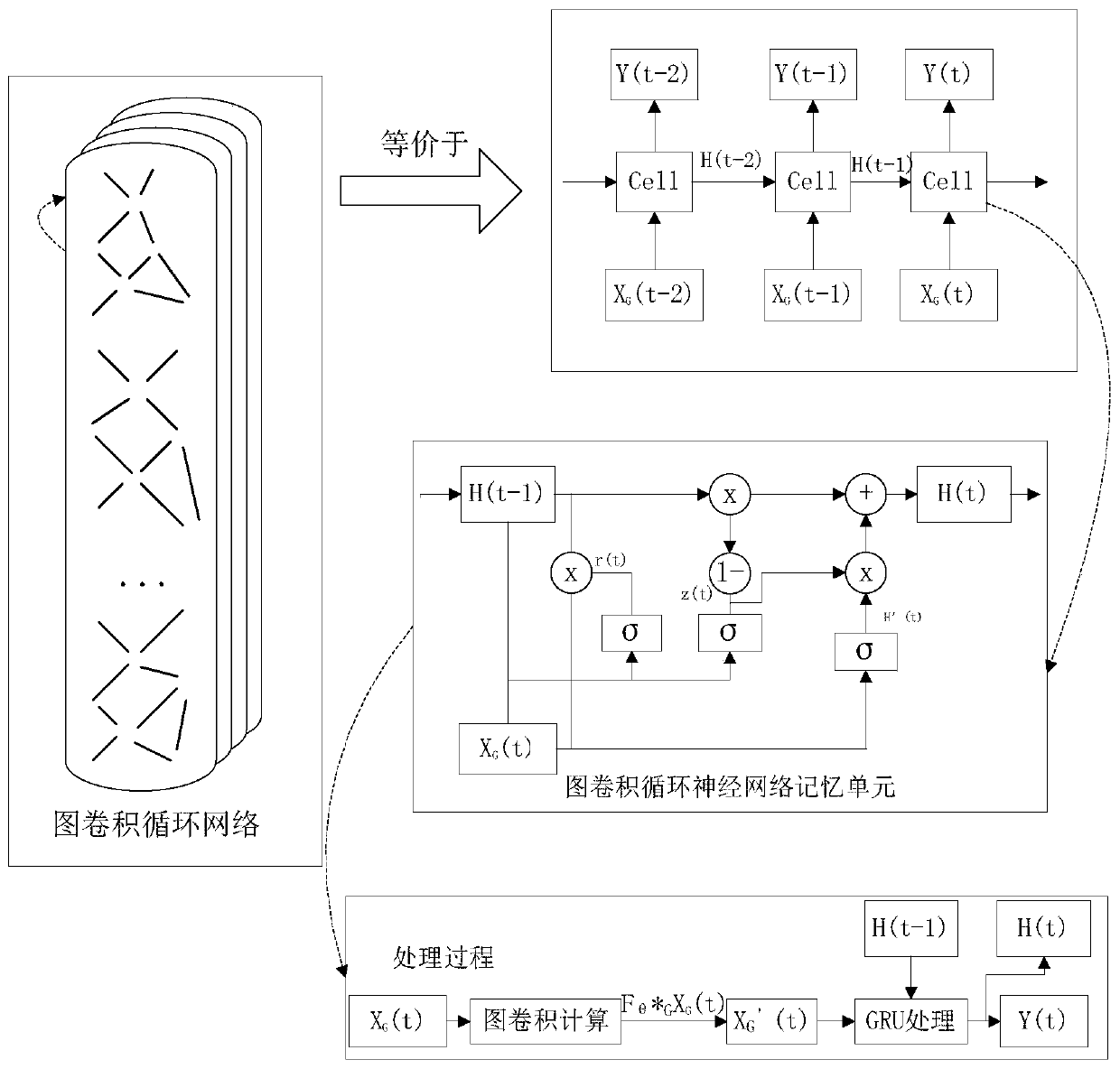
Short-term traffic flow control method based on graph convolution recurrent neural network
PatentActiveCN110827544A
Innovation
- Using a method based on graph convolutional neural network, by constructing a road network topology graph and a spatio-temporal graph convolutional recurrent network, combined with the multi-level nature of the time dimension, a near-term, daily cycle and weekly cycle component model is established, and the output is fused to achieve short-term Traffic flow forecasting and using forecast data for traffic control.

A traffic flow prediction method based on clustering and heterogeneous graph neural network
PatentActiveCN116681176B
Innovation
- Using methods based on clustering and heterogeneous graph neural networks, the traffic nodes are divided into different clusters through the clustering module, converted into heterogeneous graphs, and the GraphTransformer Network (GTN) is used to adaptively learn meta-paths, combined with the spatio-temporal feature learning module Capture spatiotemporal correlations between nodes.




Smart City Policy Framework for Traffic AI Systems
The implementation of Graph Neural Networks for real-time traffic control necessitates a comprehensive policy framework that addresses the unique challenges and opportunities presented by AI-driven traffic management systems in smart cities. Current policy landscapes across major metropolitan areas reveal significant gaps in regulatory structures specifically designed for neural network-based traffic optimization, creating uncertainty for municipal authorities and technology providers alike.
Regulatory frameworks must establish clear standards for data governance, particularly regarding the collection and processing of real-time traffic data through various sensors and monitoring systems. Privacy protection mechanisms become critical when GNN systems analyze vehicle movement patterns, requiring policies that balance operational efficiency with citizen privacy rights. Data retention policies, anonymization requirements, and consent mechanisms need explicit definition within municipal regulations.
Safety certification protocols represent another crucial policy dimension, as GNN-based traffic control systems directly impact public safety through signal timing optimization and traffic flow management. Regulatory bodies must develop testing standards and validation procedures that ensure system reliability under various traffic conditions, including emergency scenarios and system failures. Liability frameworks must clearly delineate responsibility between technology providers, municipal authorities, and system operators.
Interoperability standards require policy attention to ensure GNN traffic systems can integrate with existing urban infrastructure and future smart city developments. Technical specifications for data formats, communication protocols, and system interfaces need standardization across jurisdictions to prevent vendor lock-in and enable scalable deployment.
Ethical considerations demand policy frameworks addressing algorithmic bias in traffic optimization decisions, ensuring equitable treatment across different neighborhoods and demographic groups. Transparency requirements for AI decision-making processes must balance public accountability with proprietary technology protection.
Implementation policies should establish phased deployment strategies, pilot program requirements, and performance monitoring standards. Regular auditing mechanisms and continuous improvement protocols ensure long-term system effectiveness while maintaining public trust in AI-driven traffic management solutions.
Regulatory frameworks must establish clear standards for data governance, particularly regarding the collection and processing of real-time traffic data through various sensors and monitoring systems. Privacy protection mechanisms become critical when GNN systems analyze vehicle movement patterns, requiring policies that balance operational efficiency with citizen privacy rights. Data retention policies, anonymization requirements, and consent mechanisms need explicit definition within municipal regulations.
Safety certification protocols represent another crucial policy dimension, as GNN-based traffic control systems directly impact public safety through signal timing optimization and traffic flow management. Regulatory bodies must develop testing standards and validation procedures that ensure system reliability under various traffic conditions, including emergency scenarios and system failures. Liability frameworks must clearly delineate responsibility between technology providers, municipal authorities, and system operators.
Interoperability standards require policy attention to ensure GNN traffic systems can integrate with existing urban infrastructure and future smart city developments. Technical specifications for data formats, communication protocols, and system interfaces need standardization across jurisdictions to prevent vendor lock-in and enable scalable deployment.
Ethical considerations demand policy frameworks addressing algorithmic bias in traffic optimization decisions, ensuring equitable treatment across different neighborhoods and demographic groups. Transparency requirements for AI decision-making processes must balance public accountability with proprietary technology protection.
Implementation policies should establish phased deployment strategies, pilot program requirements, and performance monitoring standards. Regular auditing mechanisms and continuous improvement protocols ensure long-term system effectiveness while maintaining public trust in AI-driven traffic management solutions.
Edge Computing Infrastructure for Real-Time GNN Deployment
The deployment of Graph Neural Networks for real-time traffic control necessitates a robust edge computing infrastructure capable of handling the computational demands and latency requirements inherent in urban traffic management systems. Edge computing represents a paradigm shift from centralized cloud processing to distributed computing resources positioned closer to data sources, enabling the low-latency processing essential for traffic control applications.
Modern edge computing architectures for GNN deployment typically consist of multi-tier infrastructure spanning from roadside units to regional edge data centers. The foundational layer comprises edge nodes equipped with specialized hardware accelerators, including Graphics Processing Units (GPUs), Tensor Processing Units (TPUs), and Field-Programmable Gate Arrays (FPGAs), optimized for neural network inference operations. These edge nodes must possess sufficient computational capacity to execute complex graph convolution operations while maintaining sub-second response times critical for traffic signal optimization.
Network connectivity infrastructure forms the backbone of real-time GNN deployment, requiring high-bandwidth, low-latency communication channels between traffic sensors, edge computing nodes, and traffic control systems. Fifth-generation wireless networks (5G) and dedicated fiber-optic connections provide the necessary bandwidth and reliability for transmitting large-scale traffic graph data and model updates across the distributed infrastructure.
Data management and storage systems at the edge must accommodate the continuous influx of traffic sensor data while supporting rapid data retrieval for GNN processing. Edge storage solutions typically employ solid-state drives and in-memory databases to minimize data access latency, while implementing efficient data compression and filtering mechanisms to manage bandwidth constraints.
The infrastructure must also incorporate sophisticated orchestration and management systems capable of dynamic resource allocation, load balancing, and fault tolerance. Container-based deployment platforms, such as Kubernetes edge distributions, enable scalable GNN model deployment across heterogeneous edge hardware while providing automated scaling and recovery capabilities essential for maintaining continuous traffic control operations.
Security considerations demand comprehensive protection mechanisms including encrypted data transmission, secure model deployment pipelines, and intrusion detection systems specifically designed for edge computing environments. The distributed nature of edge infrastructure introduces unique security challenges that require specialized solutions to protect against potential cyber threats targeting critical traffic control systems.
Modern edge computing architectures for GNN deployment typically consist of multi-tier infrastructure spanning from roadside units to regional edge data centers. The foundational layer comprises edge nodes equipped with specialized hardware accelerators, including Graphics Processing Units (GPUs), Tensor Processing Units (TPUs), and Field-Programmable Gate Arrays (FPGAs), optimized for neural network inference operations. These edge nodes must possess sufficient computational capacity to execute complex graph convolution operations while maintaining sub-second response times critical for traffic signal optimization.
Network connectivity infrastructure forms the backbone of real-time GNN deployment, requiring high-bandwidth, low-latency communication channels between traffic sensors, edge computing nodes, and traffic control systems. Fifth-generation wireless networks (5G) and dedicated fiber-optic connections provide the necessary bandwidth and reliability for transmitting large-scale traffic graph data and model updates across the distributed infrastructure.
Data management and storage systems at the edge must accommodate the continuous influx of traffic sensor data while supporting rapid data retrieval for GNN processing. Edge storage solutions typically employ solid-state drives and in-memory databases to minimize data access latency, while implementing efficient data compression and filtering mechanisms to manage bandwidth constraints.
The infrastructure must also incorporate sophisticated orchestration and management systems capable of dynamic resource allocation, load balancing, and fault tolerance. Container-based deployment platforms, such as Kubernetes edge distributions, enable scalable GNN model deployment across heterogeneous edge hardware while providing automated scaling and recovery capabilities essential for maintaining continuous traffic control operations.
Security considerations demand comprehensive protection mechanisms including encrypted data transmission, secure model deployment pipelines, and intrusion detection systems specifically designed for edge computing environments. The distributed nature of edge infrastructure introduces unique security challenges that require specialized solutions to protect against potential cyber threats targeting critical traffic control systems.
Unlock deeper insights with Patsnap Eureka Quick Research — get a full tech report to explore trends and direct your research. Try now!
Generate Your Research Report Instantly with AI Agent
Supercharge your innovation with Patsnap Eureka AI Agent Platform!