

Variable Stiffness Actuators vs Fluidic Systems: Controllability Comparison
APR 22, 20269 MIN READ
Generate Your Research Report Instantly with AI Agent
PatSnap Eureka helps you evaluate technical feasibility & market potential.
Variable Stiffness Actuator Technology Background and Objectives
Variable stiffness actuators represent a paradigm shift in robotic and mechanical system design, emerging from the fundamental limitation of traditional rigid actuators in achieving both precision and adaptability. The concept originated from biological observations, where natural systems demonstrate remarkable ability to modulate stiffness dynamically, enabling organisms to perform delicate manipulation tasks while maintaining robust interaction capabilities with unpredictable environments.
The historical development of VSA technology traces back to the early 2000s when researchers began exploring bio-inspired approaches to overcome the inherent trade-offs between positioning accuracy and interaction safety in robotic systems. Initial implementations focused on mechanical solutions using springs, clutches, and variable transmission mechanisms to achieve controllable compliance. This evolution was driven by the growing demand for robots capable of safe human-robot interaction and adaptive manipulation in unstructured environments.
Contemporary VSA systems have evolved into sophisticated mechatronic devices that integrate advanced control algorithms with innovative mechanical designs. These systems typically employ antagonistic arrangements of actuators, variable transmission ratios, or controllable damping elements to achieve independent control of position and stiffness. The technology has matured to encompass various implementation approaches, including motor-spring configurations, pneumatic systems, and electromagnetic solutions.
The primary technical objectives of VSA development center on achieving simultaneous control of multiple mechanical properties while maintaining system efficiency and responsiveness. Key goals include maximizing the stiffness variation range, minimizing energy consumption during stiffness modulation, and ensuring rapid response times for both position and compliance control. Additionally, modern VSA research emphasizes the integration of advanced sensing capabilities to enable real-time adaptation based on environmental feedback.
Current research directions focus on addressing fundamental challenges in VSA design, particularly the optimization of mechanical efficiency and the development of unified control frameworks that can seamlessly manage the complex dynamics inherent in variable compliance systems. The technology aims to bridge the gap between the precision requirements of industrial automation and the adaptability demands of service robotics applications.
The historical development of VSA technology traces back to the early 2000s when researchers began exploring bio-inspired approaches to overcome the inherent trade-offs between positioning accuracy and interaction safety in robotic systems. Initial implementations focused on mechanical solutions using springs, clutches, and variable transmission mechanisms to achieve controllable compliance. This evolution was driven by the growing demand for robots capable of safe human-robot interaction and adaptive manipulation in unstructured environments.
Contemporary VSA systems have evolved into sophisticated mechatronic devices that integrate advanced control algorithms with innovative mechanical designs. These systems typically employ antagonistic arrangements of actuators, variable transmission ratios, or controllable damping elements to achieve independent control of position and stiffness. The technology has matured to encompass various implementation approaches, including motor-spring configurations, pneumatic systems, and electromagnetic solutions.
The primary technical objectives of VSA development center on achieving simultaneous control of multiple mechanical properties while maintaining system efficiency and responsiveness. Key goals include maximizing the stiffness variation range, minimizing energy consumption during stiffness modulation, and ensuring rapid response times for both position and compliance control. Additionally, modern VSA research emphasizes the integration of advanced sensing capabilities to enable real-time adaptation based on environmental feedback.
Current research directions focus on addressing fundamental challenges in VSA design, particularly the optimization of mechanical efficiency and the development of unified control frameworks that can seamlessly manage the complex dynamics inherent in variable compliance systems. The technology aims to bridge the gap between the precision requirements of industrial automation and the adaptability demands of service robotics applications.
Market Demand for Adaptive Stiffness Control Systems
The global market for adaptive stiffness control systems is experiencing unprecedented growth driven by the convergence of robotics, automation, and human-machine interaction technologies. Industries ranging from manufacturing and healthcare to aerospace and automotive are increasingly recognizing the critical importance of systems that can dynamically adjust their mechanical properties in response to varying operational conditions and requirements.
Manufacturing automation represents one of the most significant demand drivers for adaptive stiffness control technologies. Modern production lines require actuators capable of handling diverse materials and components with varying degrees of delicacy and precision. Variable stiffness actuators and fluidic systems are particularly sought after in assembly operations where the same robotic system must transition between high-force tasks and delicate manipulation procedures without compromising efficiency or product quality.
The healthcare and rehabilitation sector demonstrates substantial market appetite for adaptive stiffness solutions, particularly in prosthetics, exoskeletons, and rehabilitation devices. Medical device manufacturers are actively seeking controllable stiffness technologies that can provide natural, human-like responses while ensuring patient safety and comfort. The aging global population and increasing prevalence of mobility-related conditions are amplifying demand for sophisticated assistive technologies that can adapt to individual user needs and varying activity levels.
Aerospace and defense applications constitute another high-value market segment where adaptive stiffness control systems are gaining traction. Aircraft manufacturers and defense contractors require actuators that can maintain optimal performance across extreme environmental conditions while providing precise control authority. The ability to modulate stiffness characteristics enables enhanced vibration damping, improved structural integrity, and superior handling characteristics in critical applications.
The automotive industry's transition toward autonomous vehicles and advanced driver assistance systems is creating substantial demand for adaptive stiffness technologies in suspension systems, steering mechanisms, and safety applications. Vehicle manufacturers are increasingly incorporating variable stiffness actuators to enhance ride comfort, improve handling dynamics, and optimize energy efficiency across diverse driving conditions.
Emerging applications in soft robotics and human-robot collaboration are driving demand for more sophisticated controllability features in adaptive stiffness systems. Research institutions and technology companies are seeking solutions that can seamlessly transition between compliant and rigid states while maintaining precise position and force control capabilities.
Market growth is further accelerated by increasing emphasis on energy efficiency and sustainability across industries. Adaptive stiffness control systems offer significant potential for reducing energy consumption through optimized mechanical impedance matching and improved system efficiency compared to traditional fixed-stiffness alternatives.
Manufacturing automation represents one of the most significant demand drivers for adaptive stiffness control technologies. Modern production lines require actuators capable of handling diverse materials and components with varying degrees of delicacy and precision. Variable stiffness actuators and fluidic systems are particularly sought after in assembly operations where the same robotic system must transition between high-force tasks and delicate manipulation procedures without compromising efficiency or product quality.
The healthcare and rehabilitation sector demonstrates substantial market appetite for adaptive stiffness solutions, particularly in prosthetics, exoskeletons, and rehabilitation devices. Medical device manufacturers are actively seeking controllable stiffness technologies that can provide natural, human-like responses while ensuring patient safety and comfort. The aging global population and increasing prevalence of mobility-related conditions are amplifying demand for sophisticated assistive technologies that can adapt to individual user needs and varying activity levels.
Aerospace and defense applications constitute another high-value market segment where adaptive stiffness control systems are gaining traction. Aircraft manufacturers and defense contractors require actuators that can maintain optimal performance across extreme environmental conditions while providing precise control authority. The ability to modulate stiffness characteristics enables enhanced vibration damping, improved structural integrity, and superior handling characteristics in critical applications.
The automotive industry's transition toward autonomous vehicles and advanced driver assistance systems is creating substantial demand for adaptive stiffness technologies in suspension systems, steering mechanisms, and safety applications. Vehicle manufacturers are increasingly incorporating variable stiffness actuators to enhance ride comfort, improve handling dynamics, and optimize energy efficiency across diverse driving conditions.
Emerging applications in soft robotics and human-robot collaboration are driving demand for more sophisticated controllability features in adaptive stiffness systems. Research institutions and technology companies are seeking solutions that can seamlessly transition between compliant and rigid states while maintaining precise position and force control capabilities.
Market growth is further accelerated by increasing emphasis on energy efficiency and sustainability across industries. Adaptive stiffness control systems offer significant potential for reducing energy consumption through optimized mechanical impedance matching and improved system efficiency compared to traditional fixed-stiffness alternatives.
Current State of VSA and Fluidic System Technologies
Variable Stiffness Actuators have evolved significantly over the past two decades, with current implementations primarily falling into three categories: mechanically adjustable systems, magneto-rheological fluid-based actuators, and series elastic actuators with controllable compliance. Leading VSA technologies include the DLR's variable stiffness actuator series, which utilizes cam-based mechanisms to achieve stiffness modulation ranges from 0.7 to 10,000 Nm/rad. The MACCEPA actuator represents another mature approach, employing a lever arm mechanism that enables real-time stiffness adjustment while maintaining position control accuracy within ±2 degrees.
Contemporary VSA systems demonstrate impressive controllability metrics, with response times typically ranging from 50-200 milliseconds for stiffness transitions. The latest generation of VSAs incorporates advanced control algorithms that enable simultaneous position and impedance control, achieving bandwidth frequencies up to 15 Hz for stiffness modulation. However, these systems face inherent limitations in terms of power-to-weight ratios, typically ranging from 50-150 W/kg, and mechanical complexity that introduces potential failure points.
Fluidic actuation systems have experienced remarkable advancement, particularly in soft robotics applications. Pneumatic artificial muscles, such as McKibben actuators, now achieve contraction ratios exceeding 40% with response times under 100 milliseconds. Hydraulic systems demonstrate superior force density, reaching power-to-weight ratios of 300-500 W/kg, significantly outperforming VSAs in high-load applications. Modern fluidic systems incorporate sophisticated valve technologies and pressure control systems that enable precise force modulation with resolution better than 1% of maximum output force.
The controllability landscape of fluidic systems has been revolutionized by advanced pressure regulation and flow control technologies. Current pneumatic systems achieve positioning accuracy within ±0.5mm through integrated feedback control, while hydraulic counterparts demonstrate sub-millimeter precision. Fluidic systems excel in natural compliance characteristics, providing inherent safety advantages in human-robot interaction scenarios without requiring complex control algorithms.
Both technologies face distinct challenges that influence their controllability performance. VSAs struggle with energy efficiency during stiffness transitions and exhibit limited dynamic range in high-frequency applications. Fluidic systems contend with nonlinear pressure-force relationships, temperature sensitivity, and potential air compressibility issues in pneumatic variants. Recent developments in model predictive control and machine learning-based compensation algorithms are addressing these limitations, with experimental results showing 30-40% improvements in tracking accuracy for both actuator types.
The integration of advanced sensing technologies, including embedded force sensors and real-time stiffness estimation algorithms, has enhanced the controllability of both VSA and fluidic systems. Current research focuses on hybrid approaches that combine the benefits of both technologies, potentially offering superior controllability characteristics for next-generation robotic applications.
Contemporary VSA systems demonstrate impressive controllability metrics, with response times typically ranging from 50-200 milliseconds for stiffness transitions. The latest generation of VSAs incorporates advanced control algorithms that enable simultaneous position and impedance control, achieving bandwidth frequencies up to 15 Hz for stiffness modulation. However, these systems face inherent limitations in terms of power-to-weight ratios, typically ranging from 50-150 W/kg, and mechanical complexity that introduces potential failure points.
Fluidic actuation systems have experienced remarkable advancement, particularly in soft robotics applications. Pneumatic artificial muscles, such as McKibben actuators, now achieve contraction ratios exceeding 40% with response times under 100 milliseconds. Hydraulic systems demonstrate superior force density, reaching power-to-weight ratios of 300-500 W/kg, significantly outperforming VSAs in high-load applications. Modern fluidic systems incorporate sophisticated valve technologies and pressure control systems that enable precise force modulation with resolution better than 1% of maximum output force.
The controllability landscape of fluidic systems has been revolutionized by advanced pressure regulation and flow control technologies. Current pneumatic systems achieve positioning accuracy within ±0.5mm through integrated feedback control, while hydraulic counterparts demonstrate sub-millimeter precision. Fluidic systems excel in natural compliance characteristics, providing inherent safety advantages in human-robot interaction scenarios without requiring complex control algorithms.
Both technologies face distinct challenges that influence their controllability performance. VSAs struggle with energy efficiency during stiffness transitions and exhibit limited dynamic range in high-frequency applications. Fluidic systems contend with nonlinear pressure-force relationships, temperature sensitivity, and potential air compressibility issues in pneumatic variants. Recent developments in model predictive control and machine learning-based compensation algorithms are addressing these limitations, with experimental results showing 30-40% improvements in tracking accuracy for both actuator types.
The integration of advanced sensing technologies, including embedded force sensors and real-time stiffness estimation algorithms, has enhanced the controllability of both VSA and fluidic systems. Current research focuses on hybrid approaches that combine the benefits of both technologies, potentially offering superior controllability characteristics for next-generation robotic applications.
Current Controllability Solutions in Adaptive Actuators
01 Variable stiffness mechanisms using fluidic pressure control
Variable stiffness actuators can achieve controllable stiffness through fluidic pressure modulation. By adjusting the pressure of fluids within chambers or bladders, the mechanical stiffness of the actuator can be dynamically changed. This approach allows for precise control over the compliance and rigidity of the system, enabling adaptive behavior in response to different loading conditions or task requirements.- Variable stiffness mechanisms using fluidic pressure control: Variable stiffness actuators can achieve controllable stiffness by modulating fluid pressure within chambers or bladders. The stiffness can be adjusted by controlling the flow rate, pressure, or volume of fluid in the system. This approach allows for dynamic adaptation of mechanical properties during operation, enabling the actuator to switch between compliant and rigid states as needed for different tasks.
- Pneumatic and hydraulic actuation systems with variable compliance: Fluidic systems utilizing pneumatic or hydraulic principles can provide variable compliance through controlled pressurization. These systems incorporate valves, regulators, and feedback mechanisms to adjust the stiffness characteristics in real-time. The controllability is achieved through precise management of fluid dynamics, allowing for smooth transitions between different stiffness levels and improved force control.
- Soft robotic actuators with tunable mechanical properties: Soft robotic systems employ flexible materials combined with fluidic control to achieve variable stiffness. These actuators can change their mechanical properties by altering internal fluid pressure or by using phase-change materials. The controllability enables safe human-robot interaction and adaptability to different environmental conditions, making them suitable for applications requiring both delicate manipulation and robust force generation.
- Control algorithms and feedback systems for stiffness regulation: Advanced control strategies are implemented to manage the stiffness characteristics of fluidic actuators. These include model-based control, adaptive algorithms, and sensor feedback integration to monitor and adjust stiffness in real-time. The control systems process information about position, force, and pressure to maintain desired stiffness levels and ensure stable operation across varying load conditions.
- Multi-chamber and segmented fluidic actuator designs: Actuator architectures featuring multiple chambers or segments enable independent control of different regions, providing enhanced stiffness variability and controllability. Each chamber can be pressurized independently, allowing for complex deformation patterns and localized stiffness adjustment. This design approach improves the overall performance and versatility of the actuator system for applications requiring precise spatial control of mechanical properties.
02 Pneumatic and hydraulic actuation systems with variable compliance
Pneumatic and hydraulic systems can be designed to provide variable compliance through controlled fluid flow and pressure regulation. These systems utilize valves, pumps, and pressure sensors to modulate the stiffness characteristics of actuators. The controllability of such systems depends on the precision of fluid delivery mechanisms and feedback control algorithms that adjust system parameters in real-time.Expand Specific Solutions03 Soft robotic actuators with tunable mechanical properties
Soft robotic actuators employ flexible materials and fluidic channels to achieve variable stiffness. By controlling the flow and pressure of fluids through embedded channels, these actuators can transition between soft and rigid states. This tunability enhances the controllability of soft robots, allowing them to adapt to different environments and perform delicate manipulation tasks while maintaining structural integrity when needed.Expand Specific Solutions04 Control algorithms for fluidic system stability and response
Advanced control algorithms are essential for managing the dynamic behavior of variable stiffness actuators and fluidic systems. These algorithms incorporate feedback mechanisms, predictive models, and adaptive control strategies to ensure system stability and desired response characteristics. The controllability is enhanced through real-time monitoring of system states and adjustment of control parameters to compensate for disturbances and nonlinearities.Expand Specific Solutions05 Integration of sensors and feedback mechanisms for enhanced controllability
The integration of sensors such as pressure transducers, position encoders, and force sensors enables precise monitoring and control of variable stiffness actuators. Feedback mechanisms utilize sensor data to adjust actuation parameters dynamically, improving system responsiveness and accuracy. This integration is crucial for achieving high-performance controllability in applications requiring adaptive stiffness and precise motion control.Expand Specific Solutions
Key Players in VSA and Fluidic Actuator Industry
The variable stiffness actuators versus fluidic systems controllability comparison represents a rapidly evolving field within advanced robotics and automation, currently in its growth phase with expanding market opportunities across industrial, medical, and research applications. The market demonstrates significant potential, driven by increasing demand for adaptive robotic systems and precision control mechanisms. Technology maturity varies considerably among key players, with established industrial giants like Festo SE & Co. KG, ABB Ltd., and Kawasaki Heavy Industries leading in commercial fluidic system implementations, while research institutions including MIT, Heriot-Watt University, and SRI International advance variable stiffness actuator innovations. Companies such as Artemis Intelligent Power and specialized manufacturers like MicroJet Technology contribute niche expertise in precision control systems, creating a competitive landscape where traditional hydraulic solutions compete with emerging bio-inspired variable stiffness technologies for next-generation controllability applications.
Massachusetts Institute of Technology
Technical Solution: MIT has developed advanced variable stiffness actuators using series elastic actuators (SEA) and quasi-direct drive systems for robotic applications. Their research focuses on bio-inspired variable impedance control mechanisms that can dynamically adjust stiffness from 0.1 to 100 N·m/rad within milliseconds. The technology incorporates real-time feedback control algorithms that enable precise force and position control simultaneously, making it particularly effective for human-robot interaction scenarios where safety and adaptability are crucial.
Strengths: Excellent research foundation and innovative control algorithms. Weaknesses: Limited commercial scalability and high manufacturing costs.
Festo SE & Co. KG
Technical Solution: Festo specializes in pneumatic and fluidic actuator systems with advanced controllability features. Their technology includes proportional pressure control valves and smart pneumatic cylinders that achieve positioning accuracy within ±0.1mm. The company's fluidic systems utilize compressed air with flow rates up to 6000 l/min and operating pressures reaching 16 bar, enabling rapid response times under 50ms for industrial automation applications. Their BionicSoftHand demonstrates sophisticated fluidic control for delicate manipulation tasks.
Strengths: Mature fluidic technology and excellent industrial integration. Weaknesses: Energy efficiency concerns and limited force density compared to electric systems.
Core Control Algorithms for VSA vs Fluidic Systems
Method for adapting stiffness in a variable stiffness actuator
PatentActiveUS8991169B2
Innovation
- A method using a hydraulic circuit with a control fluid composed of two non-mixable fluids, where the stiffness is adapted by varying the pressure of these fluids to achieve desired forces and motion accuracy, similar to the human muscle-skeletal system, allowing real-time control of the actuator's stiffness and force.




Variable stiffness electroactive polymer systems
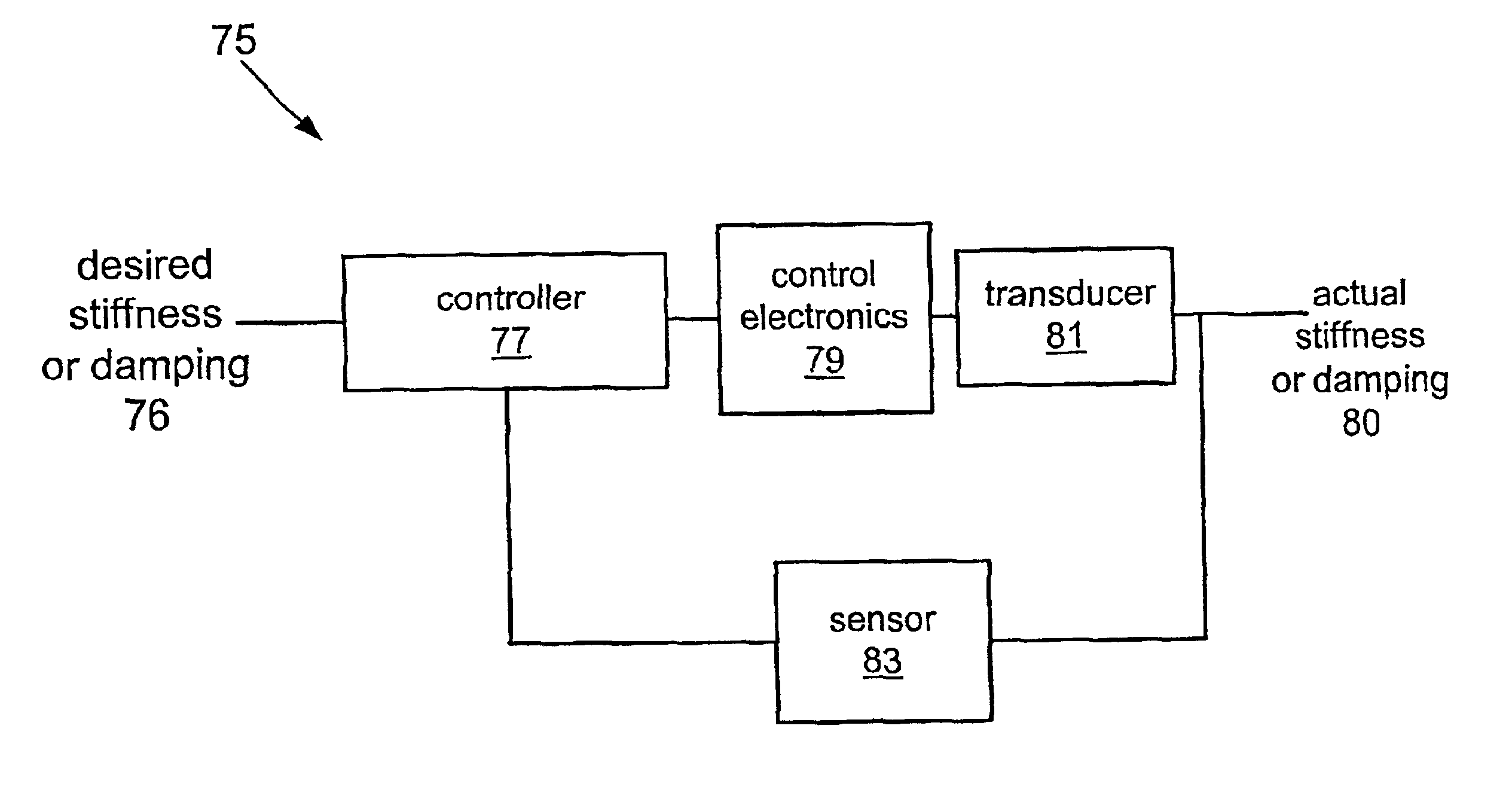
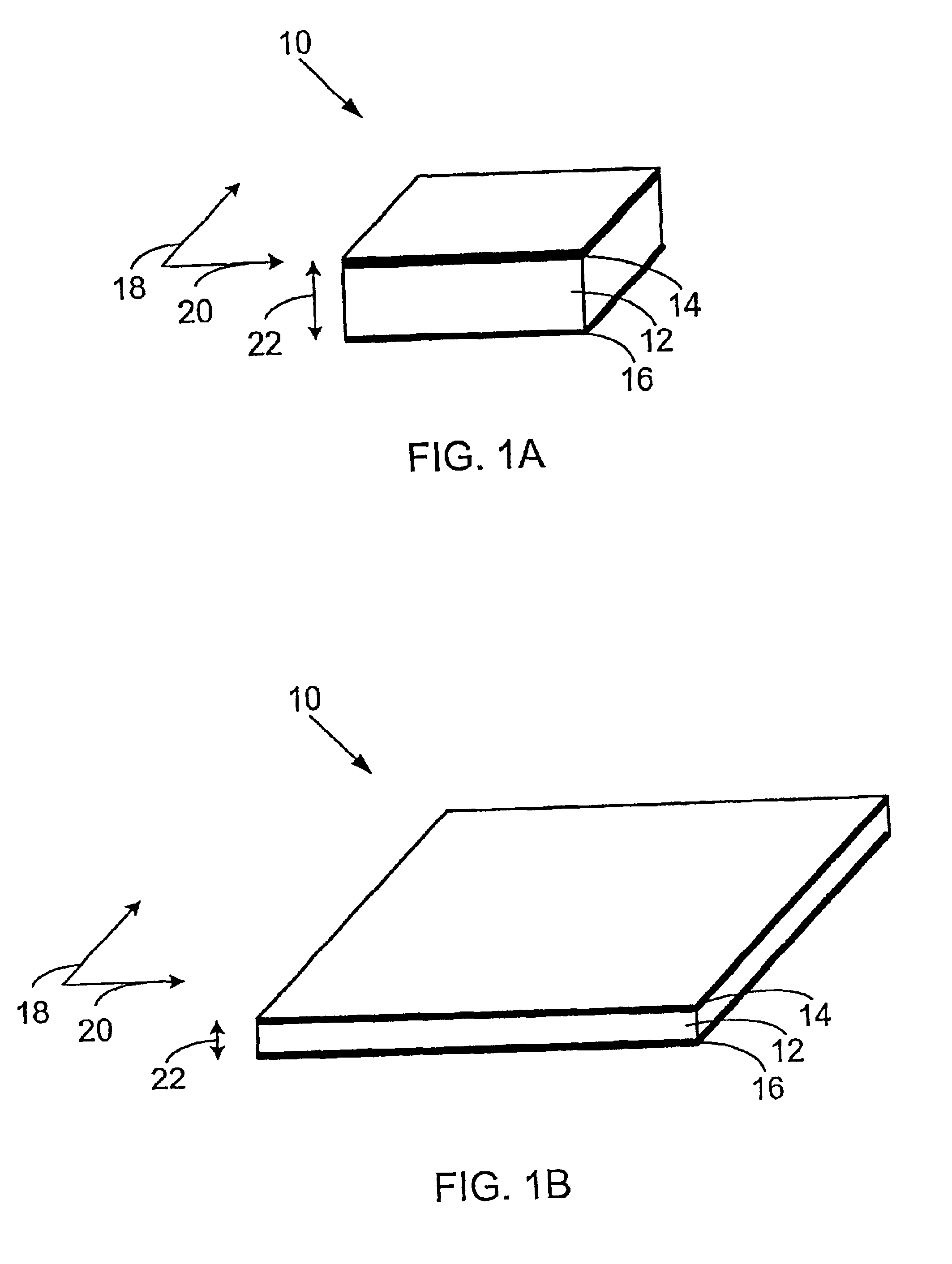
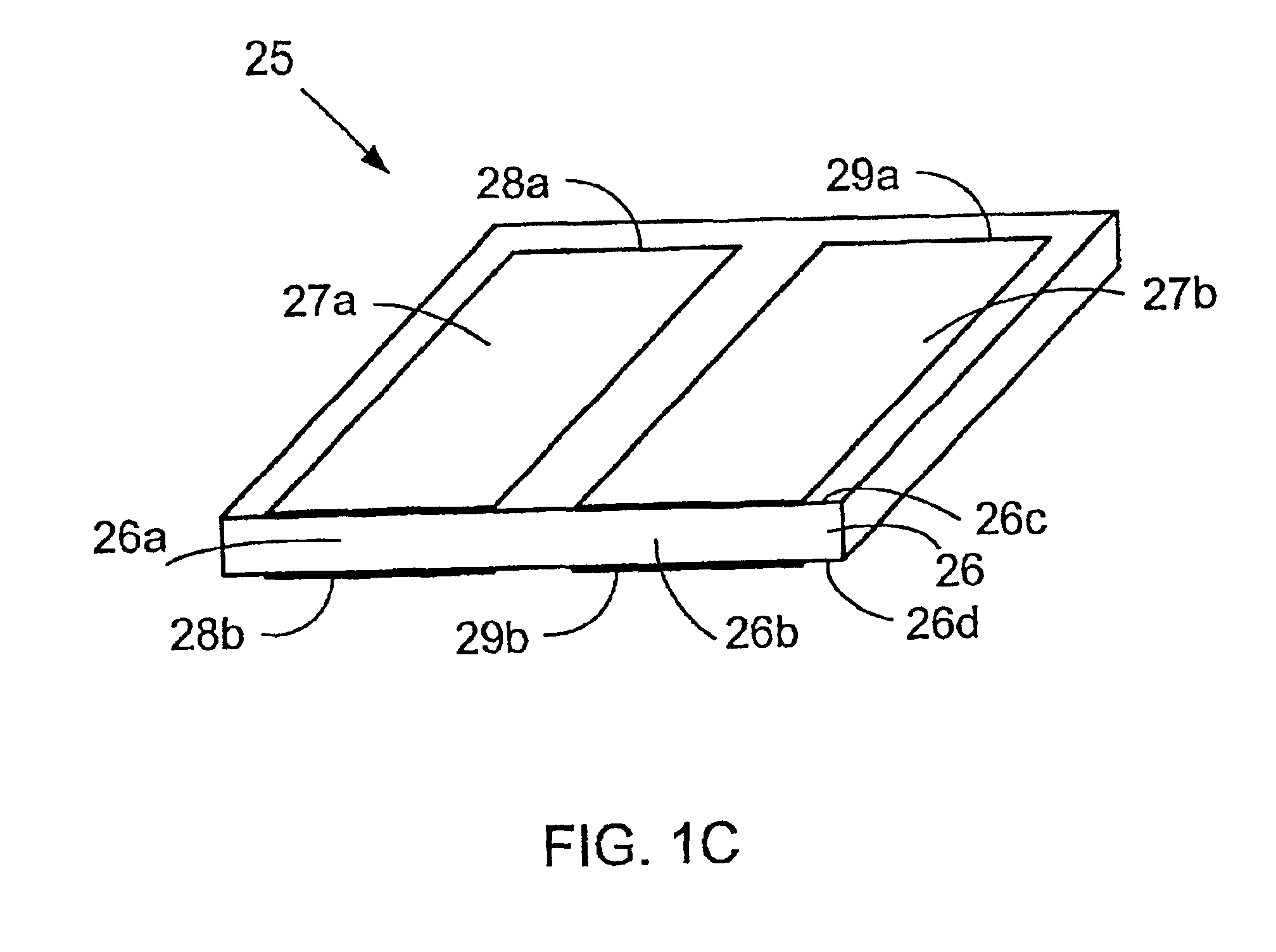
PatentInactiveUS6882086B2
Innovation
- The use of electroactive polymer transducers with mechanical interfaces and control electronics to adjust stiffness and damping by altering the electrical state, allowing for deflection and energy dissipation, enabling simple and scalable systems for stiffness and damping control.

Safety Standards for Variable Stiffness Robotics
The development of safety standards for variable stiffness robotics represents a critical convergence of mechanical engineering principles and regulatory frameworks, particularly when comparing variable stiffness actuators (VSAs) and fluidic systems. Current safety protocols primarily address traditional rigid robotic systems, leaving significant gaps in addressing the unique characteristics of compliant actuators that can dynamically modify their mechanical impedance.
International standards organizations, including ISO 10218 and ISO/TS 15066, have begun incorporating collaborative robotics safety requirements, but these frameworks inadequately address the specific risks associated with variable stiffness mechanisms. The dynamic nature of VSAs introduces novel failure modes that differ substantially from conventional actuator systems, necessitating specialized safety protocols that account for stiffness modulation capabilities and their potential impact on human-robot interaction scenarios.
Fluidic variable stiffness systems present distinct safety considerations compared to their mechanical counterparts, particularly regarding pressure vessel regulations and fluid containment protocols. These systems must comply with existing pneumatic and hydraulic safety standards while addressing unique risks associated with rapid stiffness transitions and potential system failures that could result in uncontrolled compliance changes.
The controllability comparison between VSAs and fluidic systems directly impacts safety standard development, as each technology exhibits different response characteristics during emergency situations. VSAs typically demonstrate more predictable failure modes with mechanical backup systems, while fluidic systems may experience rapid decompression events that require specialized containment and venting protocols.
Emerging safety frameworks specifically targeting variable stiffness robotics emphasize real-time monitoring of stiffness parameters, fail-safe mechanisms that default to compliant states, and comprehensive risk assessment methodologies that account for the full range of stiffness variations. These standards mandate continuous verification of actuator compliance levels and establish maximum allowable stiffness rates to prevent sudden transitions that could pose safety risks.
Future safety standard development must address the integration of advanced sensing systems capable of monitoring both mechanical and fluidic variable stiffness actuators, ensuring comprehensive safety coverage regardless of the underlying technology implementation while maintaining operational flexibility essential for effective human-robot collaboration.
International standards organizations, including ISO 10218 and ISO/TS 15066, have begun incorporating collaborative robotics safety requirements, but these frameworks inadequately address the specific risks associated with variable stiffness mechanisms. The dynamic nature of VSAs introduces novel failure modes that differ substantially from conventional actuator systems, necessitating specialized safety protocols that account for stiffness modulation capabilities and their potential impact on human-robot interaction scenarios.
Fluidic variable stiffness systems present distinct safety considerations compared to their mechanical counterparts, particularly regarding pressure vessel regulations and fluid containment protocols. These systems must comply with existing pneumatic and hydraulic safety standards while addressing unique risks associated with rapid stiffness transitions and potential system failures that could result in uncontrolled compliance changes.
The controllability comparison between VSAs and fluidic systems directly impacts safety standard development, as each technology exhibits different response characteristics during emergency situations. VSAs typically demonstrate more predictable failure modes with mechanical backup systems, while fluidic systems may experience rapid decompression events that require specialized containment and venting protocols.
Emerging safety frameworks specifically targeting variable stiffness robotics emphasize real-time monitoring of stiffness parameters, fail-safe mechanisms that default to compliant states, and comprehensive risk assessment methodologies that account for the full range of stiffness variations. These standards mandate continuous verification of actuator compliance levels and establish maximum allowable stiffness rates to prevent sudden transitions that could pose safety risks.
Future safety standard development must address the integration of advanced sensing systems capable of monitoring both mechanical and fluidic variable stiffness actuators, ensuring comprehensive safety coverage regardless of the underlying technology implementation while maintaining operational flexibility essential for effective human-robot collaboration.
Performance Benchmarking Methodologies for Actuator Control
Establishing robust performance benchmarking methodologies for actuator control systems requires a comprehensive framework that addresses the unique characteristics of both variable stiffness actuators and fluidic systems. The fundamental challenge lies in developing standardized metrics that can effectively capture the distinct operational principles while enabling meaningful cross-platform comparisons.
The primary benchmarking approach centers on dynamic response characterization, which encompasses bandwidth analysis, settling time measurements, and overshoot quantification. For variable stiffness actuators, this involves evaluating both position control accuracy and stiffness modulation capabilities under varying load conditions. The methodology must account for the inherent coupling between stiffness adjustment and position control, requiring specialized test protocols that can isolate and measure each parameter independently.
Fluidic systems demand alternative benchmarking strategies due to their continuous medium characteristics and pressure-based control mechanisms. The methodology incorporates flow rate stability analysis, pressure response dynamics, and compliance measurement under different operating pressures. Critical parameters include response linearity across the operational range and system stability under varying environmental conditions.
Standardized test environments play a crucial role in ensuring reproducible results across different actuator technologies. The benchmarking framework establishes controlled loading scenarios, including static load holding, dynamic trajectory following, and disturbance rejection capabilities. These tests utilize precision measurement equipment such as high-resolution encoders, force sensors, and pressure transducers to capture performance data with sufficient accuracy for comparative analysis.
The methodology incorporates statistical analysis techniques to handle the inherent variability in actuator performance. Multiple trial averaging, confidence interval calculations, and repeatability assessments ensure that benchmarking results reflect true system capabilities rather than measurement artifacts. This statistical rigor becomes particularly important when comparing technologies with fundamentally different noise characteristics and response patterns.
Energy efficiency metrics constitute another essential component of the benchmarking framework. The methodology establishes power consumption measurement protocols that account for different energy storage and conversion mechanisms in variable stiffness and fluidic systems. This includes standby power requirements, peak power demands during operation, and overall energy conversion efficiency across the operational envelope.
The primary benchmarking approach centers on dynamic response characterization, which encompasses bandwidth analysis, settling time measurements, and overshoot quantification. For variable stiffness actuators, this involves evaluating both position control accuracy and stiffness modulation capabilities under varying load conditions. The methodology must account for the inherent coupling between stiffness adjustment and position control, requiring specialized test protocols that can isolate and measure each parameter independently.
Fluidic systems demand alternative benchmarking strategies due to their continuous medium characteristics and pressure-based control mechanisms. The methodology incorporates flow rate stability analysis, pressure response dynamics, and compliance measurement under different operating pressures. Critical parameters include response linearity across the operational range and system stability under varying environmental conditions.
Standardized test environments play a crucial role in ensuring reproducible results across different actuator technologies. The benchmarking framework establishes controlled loading scenarios, including static load holding, dynamic trajectory following, and disturbance rejection capabilities. These tests utilize precision measurement equipment such as high-resolution encoders, force sensors, and pressure transducers to capture performance data with sufficient accuracy for comparative analysis.
The methodology incorporates statistical analysis techniques to handle the inherent variability in actuator performance. Multiple trial averaging, confidence interval calculations, and repeatability assessments ensure that benchmarking results reflect true system capabilities rather than measurement artifacts. This statistical rigor becomes particularly important when comparing technologies with fundamentally different noise characteristics and response patterns.
Energy efficiency metrics constitute another essential component of the benchmarking framework. The methodology establishes power consumption measurement protocols that account for different energy storage and conversion mechanisms in variable stiffness and fluidic systems. This includes standby power requirements, peak power demands during operation, and overall energy conversion efficiency across the operational envelope.
Unlock deeper insights with PatSnap Eureka Quick Research — get a full tech report to explore trends and direct your research. Try now!
Generate Your Research Report Instantly with AI Agent
Supercharge your innovation with PatSnap Eureka AI Agent Platform!