
Technical Background and Objectives
Background
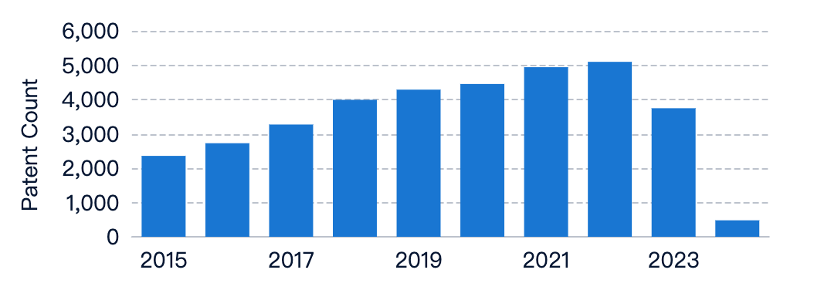
The field of end effectors with the technical effect of ‘end effector precise positioning’ has seen a steady rise in patent applications over the years, indicating growing interest and research efforts in this technical area. The divergence between patent application trends and literature publication trends suggests that while the industry has recognized the commercial potential and practical applications of end effector precise positioning technology, academic research may have shifted focus or diversified in recent times.
Objectives
The primary objective is to develop innovative solutions for precise positioning of end effectors in robotic systems. This research aims to address the challenges associated with end effector positioning, including environmental factors, system dynamics, and control strategies, ultimately enhancing the performance and reliability of robotic systems across various industrial and service applications.
Technical Current Status Analysis
End Effectors Overview
End effectors are essential components in robotic systems responsible for interacting with the environment and performing various tasks. Precise positioning of end effectors is crucial in many applications such as industrial automation, assembly operations, material handling, and surgical robotics.
Applications and Impact:
- Manufacturing Industries: Ensures high-precision assembly, quality control, and efficient production processes.
- Surgical Robotics: Critical for minimizing trauma and ensuring patient safety during delicate procedures.
- Material Handling and Logistics: Essential for efficient and reliable operations.
Technical Characteristics and Challenges:
- Mechanical Design and Kinematics: Joint stiffness, backlash, and geometric errors can introduce positioning errors.
- Sensor Integration and Feedback Control: Requires various sensors and robust control algorithms to compensate for uncertainties and disturbances.
- Calibration and Error Compensation: Essential for maintaining long-term positioning accuracy.
- Environmental Factors: External factors like vibrations and temperature fluctuations can adversely affect positioning accuracy.
- Application-Specific Requirements: Varying requirements for positioning accuracy, speed, payload capacity, and environmental conditions.
Technological Paths:
- Advanced Mechanical Design and Optimization: Lightweight and rigid materials, optimized joint configurations, and novel actuation mechanisms.
- Sensor Fusion and Advanced Control Algorithms: Integrating multiple sensor modalities with advanced control algorithms like adaptive control, robust control, and machine learning-based approaches.
- Calibration and Error Compensation Techniques: Automated calibration routines, error mapping, and real-time compensation strategies.
- Active Vibration Control and Isolation: Minimizing the impact of environmental vibrations on positioning accuracy.
- Application-Specific Design and Optimization: Tailoring end effector designs and control strategies to specific application requirements.
- Integration of Advanced Sensing and Perception: Leveraging high-resolution vision systems, depth sensors, and force/torque sensors.
Research Content
Research Objectives
Develop innovative solutions for precise positioning of end effectors in robotic systems, addressing challenges such as environmental factors, system dynamics, and control strategies.
Research Direction and Focus
Sensor Integration and Feedback Systems
- Develop robust sensor fusion algorithms and feedback control systems.
- Integrate advanced sensor technologies such as vision systems, force/torque sensors, and inertial measurement units.
Kinematic and Dynamic Modeling
- Develop advanced mathematical models representing the robot’s motion, including joint flexibility, link deformations, and external forces.
- Use these models as a foundation for control algorithms and compensation strategies.
Control Strategies and Optimization Techniques
- Investigate advanced control strategies and optimization techniques.
- Develop adaptive and robust control algorithms, machine learning-based approaches, and optimization techniques for precise positioning.
System Integration and Testing
- Integrate developed solutions into real-world robotic systems.
- Design and implement hardware and software interfaces, and develop testing protocols and benchmarking methodologies.
- Conduct rigorous evaluation and validation of proposed solutions.
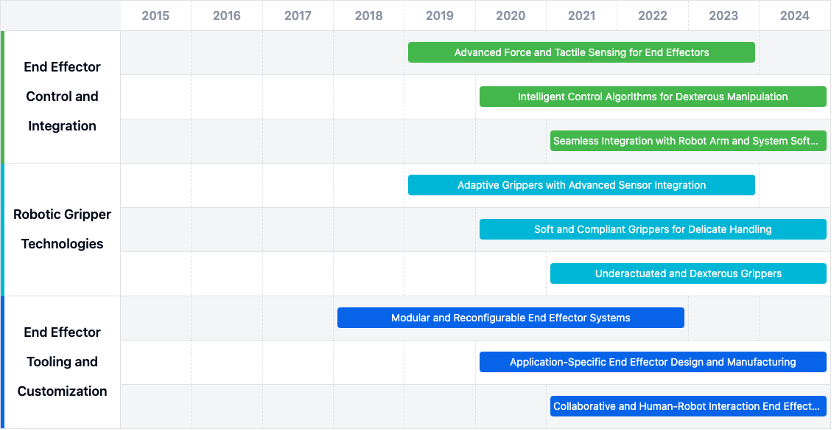
Technical Development Roadmap
Key Areas of Advancement
- Robotic Gripper Technologies: Adaptive grippers, soft and compliant grippers, and dexterous grippers for intricate manipulation tasks.
- End Effector Tooling and Customization: Modular and reconfigurable end effector systems, application-specific designs, and collaborative end effectors.
- End Effector Control and Integration: Advanced force and tactile sensing, intelligent control algorithms, and seamless integration with robot arms and system software.
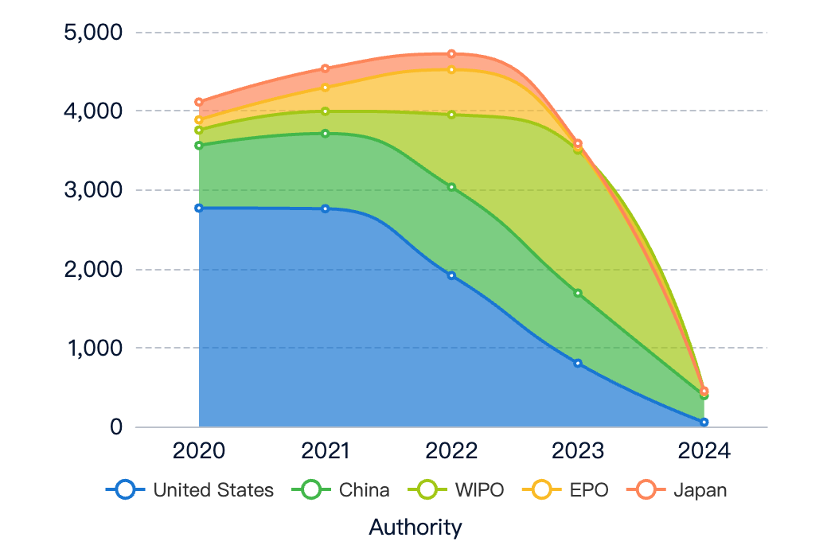
Main Player Analysis
Key Players and Focus
- California Institute of Technology: Research on aerospace engineering, control systems, motion planning, and robotic manipulators.
- Harbin Institute of Technology: Focus on control engineering, kinematics, robotics, and computer vision.
- Cilag GmbH International: Extensive patent activity on developing technologies for precise positioning of end effectors.
- Covidien Pte Ltd.: Strong focus on developing innovative technologies for precise positioning in medical devices and surgical robotics.
- Monsanto Technology LLC: Research on precise positioning technologies for agriculture, biotechnology, and precision farming.
Current Technical Solution Overview
Precise Positioning Mechanisms for End Effectors
- Robotic End Effectors: Multi-axis motion systems, feedback control loops, and high-precision actuators.
- Manufacturing Processes: Linear or rotary motion systems, high-resolution encoders, and advanced control algorithms.
- Scientific Instruments: Piezoelectric actuators, flexure-based systems, and nanopositioning stages.
- Compensation Techniques: Real-time error mapping, model-based compensation algorithms, and active disturbance rejection.
- Modular and Reconfigurable Mechanisms: Interchangeable modules or components for flexible application requirements.
Methods for Precise Positioning of End Effectors
- Visual Positioning: Machine vision or camera-based systems for accurate positioning.
- Mechanical Positioning Mechanisms: Specialized mechanical positioning devices for fine adjustments.
- Feedback Control and Sensor-Based Positioning: Using sensors like encoders and force sensors for real-time adjustments.
- Kinematic Modeling and Calibration: Accurate kinematic models and calibration techniques to achieve precise positioning.
Precise Positioning Systems for End Effectors
- Robotic End Effectors: Combining sensors, control algorithms, and mechanical components for high-precision positioning.
- Unmanned Aerial Vehicles (UAVs): Systems for accurate navigation, positioning, and control.
- Medical and Surgical Applications: Robotic arms and radiation therapy devices for precise treatment delivery.
- Industrial Machinery and Equipment: Ensuring accurate positioning and movement of tools in manufacturing processes.
Precise Positioning Devices for End Effector Applications
- Mechanical Mechanisms: Differential positioning mechanisms, orbital robot positioning systems, and clamps or chucks.
- Visual or Optical Positioning: Machine vision systems and visual positioning methods.
- Positioning Algorithms and Methods: Real-time kinematic (RTK) positioning and precise point positioning methods.
- Integrated Manufacturing or Machining Equipment: Devices for precise positioning during operations.
Precise Positioning Techniques for End Effector Components
- Visual Feedback: Using cameras to track and adjust end effector positions.
- Mechanical Positioning Mechanisms: Precision gears, lead screws, and linear actuators for accurate positioning.
- Differential Positioning Techniques: Measuring relative positions with laser interferometry or capacitive sensors.
- Application-Specific Techniques: Tailored for specific applications like surgical robots or automotive components.
Key Patent Interpretation
Patent Highlights
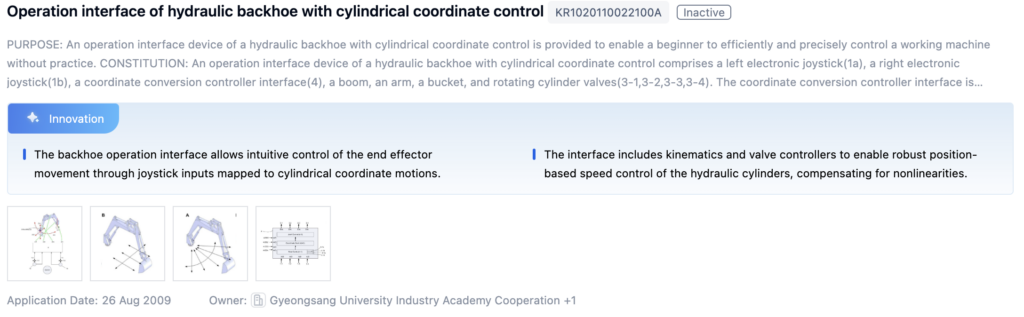
Patent 1: Operation Interface of Hydraulic Backhoe with Cylindrical Coordinate Control
- Core Invention Points:
- Joystick inputs mapped to cylindrical coordinate motions for intuitive control.
- Kinematics and valve controllers enable robust position-based speed control.
Patent 2: Coordinating End Effector and Vision Controls
- Core Invention Points:
- Processor-controlled end effector selectively movable according to end effector coordinates.
- Camera detects objects with overlapping coordinates for accurate positioning.
Patent 3: Operation Interface of Hydraulic Backhoe with Cylindrical Coordinate Control
- Core Invention Points:
- Joystick movements linked to cylindrical coordinate system for intuitive control.
- Motion control of end effector and bucket through joystick operations.
Possible Research Directions
- Precise Positioning Mechanisms for End Effectors: Developing mechanical, optical, and sensor-based systems for accurate control.
- Methods for Precise Positioning of End Effectors: Techniques involving visual tracking, sensor feedback, and computational algorithms.
- Precise Positioning Systems for End Effector Applications: Integrated systems combining hardware, control algorithms, and positioning techniques.
- Precise Positioning Devices for End Effector Alignment: Mechanical, optical, and sensor-based components for accurate positioning.
- Precise Positioning Techniques for Specific Industries: Industry-specific methods for applications like welding, machining, and medical procedures.
If you want an in-depth research or a technical report, you can always get what you want in Eureka Technical Research. Try now!
