Compare EPM vs Electrostatic Grippers: Surface Constraints
MAY 8, 202610 MIN READ
Generate Your Research Report Instantly with AI Agent
PatSnap Eureka helps you evaluate technical feasibility & market potential.
EPM vs Electrostatic Grippers Background and Objectives
The evolution of robotic gripping technologies has been fundamentally shaped by the need to handle diverse materials and surfaces with precision and reliability. Traditional mechanical grippers, while effective for rigid objects, have proven inadequate for delicate, flexible, or irregularly shaped items. This limitation has driven the development of non-contact and surface-adaptive gripping solutions, leading to two prominent technologies: Electropermanent Magnets (EPM) and Electrostatic Grippers.
EPM technology emerged from the fusion of permanent magnet principles with electromagnetic control, offering the unique advantage of maintaining holding force without continuous power consumption. This technology has found applications in manufacturing automation, particularly in metalworking industries where ferromagnetic materials dominate. The development trajectory of EPM systems has focused on optimizing magnetic field distribution and reducing switching energy requirements.
Electrostatic grippers represent a fundamentally different approach, utilizing electrostatic forces generated by high-voltage, low-current electrical fields. This technology has gained prominence in semiconductor manufacturing, electronics assembly, and handling of non-conductive materials. The evolution of electrostatic gripping has been driven by advances in high-voltage power electronics and dielectric materials.
The primary objective of comparing these technologies centers on understanding their respective surface constraints and applicability domains. EPM systems are inherently limited to ferromagnetic materials, requiring direct contact with conductive surfaces to establish magnetic circuits. Conversely, electrostatic grippers can handle a broader range of materials but face challenges with highly conductive surfaces that dissipate electrostatic charges.
Surface roughness, contamination, and material properties significantly impact both technologies' performance. EPM systems demonstrate robust performance across varying surface conditions on ferromagnetic materials, while electrostatic grippers require careful consideration of surface dielectric properties and cleanliness. Understanding these constraints is crucial for determining optimal application scenarios and developing hybrid solutions that leverage the strengths of both technologies.
The comparative analysis aims to establish clear guidelines for technology selection based on material properties, surface characteristics, and operational requirements, ultimately advancing the field of adaptive robotic manipulation.
EPM technology emerged from the fusion of permanent magnet principles with electromagnetic control, offering the unique advantage of maintaining holding force without continuous power consumption. This technology has found applications in manufacturing automation, particularly in metalworking industries where ferromagnetic materials dominate. The development trajectory of EPM systems has focused on optimizing magnetic field distribution and reducing switching energy requirements.
Electrostatic grippers represent a fundamentally different approach, utilizing electrostatic forces generated by high-voltage, low-current electrical fields. This technology has gained prominence in semiconductor manufacturing, electronics assembly, and handling of non-conductive materials. The evolution of electrostatic gripping has been driven by advances in high-voltage power electronics and dielectric materials.
The primary objective of comparing these technologies centers on understanding their respective surface constraints and applicability domains. EPM systems are inherently limited to ferromagnetic materials, requiring direct contact with conductive surfaces to establish magnetic circuits. Conversely, electrostatic grippers can handle a broader range of materials but face challenges with highly conductive surfaces that dissipate electrostatic charges.
Surface roughness, contamination, and material properties significantly impact both technologies' performance. EPM systems demonstrate robust performance across varying surface conditions on ferromagnetic materials, while electrostatic grippers require careful consideration of surface dielectric properties and cleanliness. Understanding these constraints is crucial for determining optimal application scenarios and developing hybrid solutions that leverage the strengths of both technologies.
The comparative analysis aims to establish clear guidelines for technology selection based on material properties, surface characteristics, and operational requirements, ultimately advancing the field of adaptive robotic manipulation.
Market Demand for Advanced Gripping Solutions
The global automation industry is experiencing unprecedented growth, driving substantial demand for advanced gripping solutions across multiple sectors. Manufacturing facilities worldwide are increasingly adopting robotic systems to enhance productivity, reduce operational costs, and maintain competitive advantages in rapidly evolving markets. This transformation has created a critical need for sophisticated gripping technologies that can handle diverse materials and surface conditions with precision and reliability.
Electronics manufacturing represents one of the most demanding applications for advanced gripping systems. The industry requires handling of delicate components with varying surface properties, from smooth silicon wafers to textured circuit boards. Traditional mechanical grippers often prove inadequate due to their potential to cause surface damage or contamination. This limitation has intensified the search for non-contact or minimal-contact gripping solutions that can accommodate different surface constraints while maintaining operational efficiency.
Automotive manufacturing continues to drive significant demand for versatile gripping technologies. Modern vehicle production involves handling components with diverse surface characteristics, including painted panels, textured plastics, and metallic parts with varying conductivity levels. The industry's shift toward electric vehicles has further complicated gripping requirements, as manufacturers must handle battery components and electronic systems that demand specialized surface interaction protocols.
The semiconductor industry presents particularly stringent requirements for gripping solutions due to extreme cleanliness standards and surface sensitivity constraints. Wafer handling processes require gripping systems that can accommodate different substrate materials while preventing particle generation or electrostatic discharge damage. These applications have created substantial market opportunities for gripping technologies that can adapt to varying surface properties without compromising product integrity.
Logistics and warehousing sectors are experiencing rapid automation adoption, creating demand for gripping systems capable of handling packages with unpredictable surface characteristics. E-commerce growth has intensified the need for flexible gripping solutions that can adapt to different packaging materials, surface textures, and geometric configurations without requiring extensive reconfiguration or operator intervention.
Food processing and pharmaceutical industries require gripping solutions that can handle products with varying surface properties while maintaining strict hygiene standards. These applications demand technologies that can accommodate different surface textures and materials while preventing contamination or product damage, creating specialized market segments for advanced gripping technologies.
The emerging trend toward collaborative robotics has further expanded market demand for intelligent gripping systems. These applications require gripping technologies that can safely interact with human workers while maintaining adaptability to different surface constraints and operational requirements, representing a growing market segment with substantial long-term potential.
Electronics manufacturing represents one of the most demanding applications for advanced gripping systems. The industry requires handling of delicate components with varying surface properties, from smooth silicon wafers to textured circuit boards. Traditional mechanical grippers often prove inadequate due to their potential to cause surface damage or contamination. This limitation has intensified the search for non-contact or minimal-contact gripping solutions that can accommodate different surface constraints while maintaining operational efficiency.
Automotive manufacturing continues to drive significant demand for versatile gripping technologies. Modern vehicle production involves handling components with diverse surface characteristics, including painted panels, textured plastics, and metallic parts with varying conductivity levels. The industry's shift toward electric vehicles has further complicated gripping requirements, as manufacturers must handle battery components and electronic systems that demand specialized surface interaction protocols.
The semiconductor industry presents particularly stringent requirements for gripping solutions due to extreme cleanliness standards and surface sensitivity constraints. Wafer handling processes require gripping systems that can accommodate different substrate materials while preventing particle generation or electrostatic discharge damage. These applications have created substantial market opportunities for gripping technologies that can adapt to varying surface properties without compromising product integrity.
Logistics and warehousing sectors are experiencing rapid automation adoption, creating demand for gripping systems capable of handling packages with unpredictable surface characteristics. E-commerce growth has intensified the need for flexible gripping solutions that can adapt to different packaging materials, surface textures, and geometric configurations without requiring extensive reconfiguration or operator intervention.
Food processing and pharmaceutical industries require gripping solutions that can handle products with varying surface properties while maintaining strict hygiene standards. These applications demand technologies that can accommodate different surface textures and materials while preventing contamination or product damage, creating specialized market segments for advanced gripping technologies.
The emerging trend toward collaborative robotics has further expanded market demand for intelligent gripping systems. These applications require gripping technologies that can safely interact with human workers while maintaining adaptability to different surface constraints and operational requirements, representing a growing market segment with substantial long-term potential.
Current State and Surface Constraints of Gripping Technologies
The current landscape of gripping technologies is dominated by two primary electrostatic approaches: Electrostatic Grippers (ESG) and Electropermanent Magnets (EPM). Both technologies have achieved significant maturity in industrial applications, yet each faces distinct surface-related constraints that limit their universal adoption. ESG systems utilize high-voltage electric fields to generate attractive forces through dielectric polarization, while EPM combines permanent magnets with electromagnetic control to create switchable magnetic fields.
Surface material compatibility represents the most critical constraint differentiating these technologies. ESG systems demonstrate superior versatility across diverse material types, effectively gripping both conductive and non-conductive surfaces including plastics, ceramics, glass, and composite materials. The technology operates through capacitive coupling, making it largely material-agnostic as long as the target surface exhibits sufficient dielectric properties. However, EPM systems face fundamental limitations, functioning exclusively with ferromagnetic materials such as steel, iron, and certain alloys.
Surface geometry and topology present significant challenges for both technologies, though manifesting differently. ESG performance degrades substantially with surface roughness exceeding 10-15 micrometers, as air gaps reduce the effective electric field strength exponentially. Curved surfaces with radii below 50mm pose additional difficulties for maintaining uniform field distribution. EPM systems similarly struggle with surface irregularities, but their magnetic field penetration provides slightly better tolerance for moderate roughness up to 25 micrometers.
Contamination sensitivity varies markedly between the two approaches. ESG systems exhibit high sensitivity to surface contaminants, particularly conductive particles, oils, and moisture, which can cause electrical breakdown or significantly reduce gripping force. Even thin oxide layers or dust accumulation can degrade performance by 30-50%. Conversely, EPM systems demonstrate superior contamination tolerance, maintaining effective operation through paint layers, light rust, and moderate debris, though thick non-ferromagnetic coatings still present challenges.
Surface preparation requirements reflect these sensitivity differences. ESG implementations typically demand clean, smooth surfaces with controlled environmental conditions to prevent electrical discharge and ensure consistent performance. EPM systems require minimal surface preparation beyond removing thick non-magnetic coatings, making them more suitable for industrial environments with variable cleanliness standards.
Temperature-related surface constraints affect both technologies but through different mechanisms. ESG systems face limitations from temperature-induced changes in material dielectric properties and thermal expansion affecting gap tolerances. EPM systems encounter challenges from temperature-dependent magnetic permeability changes and potential demagnetization of permanent magnet components at elevated temperatures above 80°C.
Current technological developments focus on addressing these surface constraints through advanced control algorithms, adaptive field modulation, and hybrid approaches combining multiple gripping principles to expand operational envelopes across diverse surface conditions.
Surface material compatibility represents the most critical constraint differentiating these technologies. ESG systems demonstrate superior versatility across diverse material types, effectively gripping both conductive and non-conductive surfaces including plastics, ceramics, glass, and composite materials. The technology operates through capacitive coupling, making it largely material-agnostic as long as the target surface exhibits sufficient dielectric properties. However, EPM systems face fundamental limitations, functioning exclusively with ferromagnetic materials such as steel, iron, and certain alloys.
Surface geometry and topology present significant challenges for both technologies, though manifesting differently. ESG performance degrades substantially with surface roughness exceeding 10-15 micrometers, as air gaps reduce the effective electric field strength exponentially. Curved surfaces with radii below 50mm pose additional difficulties for maintaining uniform field distribution. EPM systems similarly struggle with surface irregularities, but their magnetic field penetration provides slightly better tolerance for moderate roughness up to 25 micrometers.
Contamination sensitivity varies markedly between the two approaches. ESG systems exhibit high sensitivity to surface contaminants, particularly conductive particles, oils, and moisture, which can cause electrical breakdown or significantly reduce gripping force. Even thin oxide layers or dust accumulation can degrade performance by 30-50%. Conversely, EPM systems demonstrate superior contamination tolerance, maintaining effective operation through paint layers, light rust, and moderate debris, though thick non-ferromagnetic coatings still present challenges.
Surface preparation requirements reflect these sensitivity differences. ESG implementations typically demand clean, smooth surfaces with controlled environmental conditions to prevent electrical discharge and ensure consistent performance. EPM systems require minimal surface preparation beyond removing thick non-magnetic coatings, making them more suitable for industrial environments with variable cleanliness standards.
Temperature-related surface constraints affect both technologies but through different mechanisms. ESG systems face limitations from temperature-induced changes in material dielectric properties and thermal expansion affecting gap tolerances. EPM systems encounter challenges from temperature-dependent magnetic permeability changes and potential demagnetization of permanent magnet components at elevated temperatures above 80°C.
Current technological developments focus on addressing these surface constraints through advanced control algorithms, adaptive field modulation, and hybrid approaches combining multiple gripping principles to expand operational envelopes across diverse surface conditions.
Existing EPM and Electrostatic Gripping Solutions
01 Electrostatic gripper design and configuration
Electrostatic grippers utilize electric fields to create attractive forces for gripping objects without physical contact. The design involves electrode configurations, voltage control systems, and insulation materials to generate controlled electrostatic forces. These systems can be configured with multiple electrodes in various patterns to optimize gripping performance and adapt to different surface geometries.- Electrostatic gripper electrode configuration and surface treatment: Methods for configuring electrodes in electrostatic grippers to optimize gripping force and surface contact. This includes electrode placement patterns, surface texturing, and dielectric layer treatments to enhance electrostatic adhesion while managing surface constraints and contact area optimization.
- EPM gripper magnetic field control and surface adaptation: Techniques for controlling magnetic fields in electromagnetic permanent magnet grippers to accommodate various surface constraints. This involves magnetic pole arrangements, field strength modulation, and adaptive mechanisms that allow grippers to conform to different surface geometries and material properties.
- Surface sensing and feedback systems for gripper control: Integration of sensing mechanisms that detect surface properties and constraints to provide feedback for gripper operation. These systems monitor surface conditions, material thickness, and contact quality to automatically adjust gripping parameters and ensure reliable object manipulation.
- Multi-modal gripping with combined electrostatic and magnetic forces: Hybrid gripper designs that utilize both electrostatic and electromagnetic forces to overcome individual surface constraints. These systems can switch between or combine different gripping modes based on surface characteristics, providing enhanced versatility and reliability across diverse materials and geometries.
- Surface constraint compensation through mechanical adaptation: Mechanical design solutions that allow grippers to adapt to surface irregularities and constraints through flexible mounting systems, compliant interfaces, and adjustable gripper geometries. These approaches enable effective gripping despite surface variations, curvature, or accessibility limitations.
02 Surface material compatibility and constraints
The effectiveness of electrostatic grippers depends heavily on the surface properties of target objects, including conductivity, dielectric constant, and surface roughness. Different materials require specific voltage levels and electrode configurations to achieve optimal gripping force. Surface contamination, moisture, and temperature variations can significantly affect the electrostatic attraction and must be considered in system design.Expand Specific Solutions03 EPM integration with electrostatic systems
Electromagnetic positioning mechanisms can be integrated with electrostatic grippers to provide precise positioning and orientation control. This combination allows for both coarse positioning through electromagnetic actuation and fine gripping through electrostatic forces. The integration requires careful consideration of electromagnetic interference and power management between the two systems.Expand Specific Solutions04 Control systems and feedback mechanisms
Advanced control algorithms are essential for managing electrostatic gripper operations, including force regulation, position feedback, and safety monitoring. These systems incorporate sensors to detect grip strength, object presence, and surface conditions. Real-time adjustment of electrical parameters ensures consistent performance across varying operating conditions and different object types.Expand Specific Solutions05 Safety and operational limitations
Electrostatic grippers must operate within specific voltage and current limits to ensure safe handling of sensitive components and prevent electrical discharge. Environmental factors such as humidity, temperature, and atmospheric pressure affect system performance and require compensation mechanisms. Proper grounding, insulation, and fail-safe mechanisms are critical for preventing damage to both the gripper system and handled objects.Expand Specific Solutions
Key Players in EPM and Electrostatic Gripper Industry
The EPM versus electrostatic grippers surface constraints technology represents a mature market segment within semiconductor manufacturing and precision handling applications. The industry has reached an advanced development stage, with established players like Applied Materials, ASML Netherlands, and Lam Research driving innovation in wafer processing equipment. Market size reflects substantial investment in semiconductor fabrication infrastructure globally. Technology maturity varies significantly across applications - while companies like SEMCO Engineering demonstrate specialized expertise in electrostatic chuck manufacturing with over 15 years of experience, research institutions including Fraunhofer-Gesellschaft and Helmholtz-Zentrum Dresden-Rossendorf continue advancing fundamental technologies. The competitive landscape shows consolidation around major semiconductor equipment manufacturers, with specialized firms like Plasma-Therm and Axcelis Technologies focusing on niche applications, indicating both market maturity and ongoing technological refinement opportunities.
Fraunhofer-Gesellschaft eV
Technical Solution: Fraunhofer has conducted extensive research comparing EPM (Electro-Permanent Magnet) and electrostatic gripping technologies, focusing on their performance limitations related to surface constraints. Their research demonstrates that EPM systems can handle ferromagnetic materials effectively regardless of surface roughness or contamination, while electrostatic grippers require clean, relatively smooth surfaces for optimal performance. Fraunhofer's comparative studies show that EPM technology maintains consistent gripping force across various surface conditions including oxidized, painted, or textured metallic surfaces, whereas electrostatic systems experience significant performance degradation on rough or contaminated surfaces. Their research indicates that surface roughness above 10 micrometers significantly impacts electrostatic gripping efficiency, while EPM systems maintain performance across much broader surface condition ranges. The institute has developed hybrid approaches combining both technologies to optimize performance across different substrate types and surface conditions.
Strengths: Comprehensive research-based approach, extensive comparative analysis capabilities, innovative hybrid technology development. Weaknesses: Primarily research-focused rather than commercial products, longer development timelines, limited manufacturing scale capabilities.
Applied Materials, Inc.
Technical Solution: Applied Materials has developed advanced electrostatic gripping solutions for semiconductor manufacturing processes, particularly focusing on wafer handling systems that can operate across various surface conditions. Their electrostatic chuck (ESC) technology incorporates multi-zone control capabilities, allowing for precise clamping force distribution across different substrate materials including silicon, glass, and compound semiconductors. The company's ESC systems feature temperature compensation algorithms and can handle substrates with varying surface roughness and dielectric properties. Their technology addresses surface constraint challenges through adaptive voltage control systems that automatically adjust clamping forces based on substrate characteristics, ensuring reliable gripping performance even on non-uniform or contaminated surfaces.
Strengths: Industry-leading experience in semiconductor equipment, proven reliability in high-volume manufacturing environments, comprehensive multi-zone control capabilities. Weaknesses: High cost implementation, primarily optimized for semiconductor applications, limited flexibility for non-standard substrate materials.
Core Technologies in Surface-Adaptive Gripping Systems
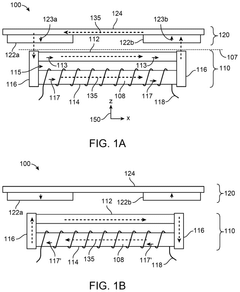
Axisymmetric electropermanent magnets
PatentActiveUS20210183553A1
Innovation
- The design incorporates an axisymmetric architecture with a cylindrical NdFeB magnet embedded inside an Alnico magnet, using steel plates to control magnetic flux, and a coil to reverse the Alnico magnet's magnetization without affecting the NdFeB magnet, achieving a high latching force ratio and low power consumption.




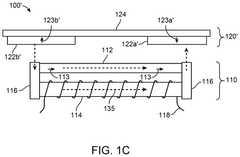
Magnetic systems incorporating electropermanent magnet arrays
PatentPendingUS20250111972A1
Innovation
- A magnetic system that includes a fixed magnet array with permanent magnets and a switchable magnet array using electropermanent magnets (EPMs), allowing the system to switch between attractive, repulsive, and neutral magnetic states by controlling the EPMs.
Safety Standards for Industrial Gripping Systems
Industrial gripping systems utilizing EPM and electrostatic technologies must comply with comprehensive safety standards to ensure operational reliability and worker protection. The International Organization for Standardization (ISO) provides fundamental guidelines through ISO 10218 for industrial robot safety, while IEC 60204-1 establishes electrical safety requirements for industrial machinery. These standards form the regulatory foundation for both EPM and electrostatic gripping applications.
EPM grippers face specific safety considerations due to their electromagnetic field generation and power requirements. The systems must incorporate fail-safe mechanisms to prevent uncontrolled release during power failures, typically achieved through backup power systems or mechanical locking features. Electromagnetic compatibility (EMC) standards, particularly IEC 61000 series, govern field emission limits to prevent interference with nearby electronic equipment and ensure worker safety regarding electromagnetic exposure.
Electrostatic grippers present unique safety challenges related to high-voltage operation and static discharge risks. These systems must comply with IEC 61010-1 safety requirements for electrical equipment, emphasizing proper insulation, grounding, and voltage containment. Personnel protection protocols include mandatory use of anti-static equipment and implementation of lockout/tagout procedures during maintenance operations.
Surface constraint considerations directly impact safety compliance for both technologies. EPM systems require conductive surface materials, necessitating additional safety measures for electrical conductivity management and potential short-circuit prevention. Electrostatic grippers demand specific surface resistivity ranges, requiring careful material selection and surface treatment protocols to maintain safe operating parameters while preventing electrostatic discharge incidents.
Risk assessment methodologies, as outlined in ISO 12100, mandate comprehensive hazard identification for both gripping technologies. This includes evaluation of mechanical hazards from grip failure, electrical hazards from power systems, and environmental factors affecting surface interactions. Emergency stop systems, safety interlocks, and operator training programs constitute essential safety infrastructure components.
Regular safety audits and compliance verification ensure continued adherence to evolving standards, particularly as surface constraint requirements may change with different workpiece materials and environmental conditions.
EPM grippers face specific safety considerations due to their electromagnetic field generation and power requirements. The systems must incorporate fail-safe mechanisms to prevent uncontrolled release during power failures, typically achieved through backup power systems or mechanical locking features. Electromagnetic compatibility (EMC) standards, particularly IEC 61000 series, govern field emission limits to prevent interference with nearby electronic equipment and ensure worker safety regarding electromagnetic exposure.
Electrostatic grippers present unique safety challenges related to high-voltage operation and static discharge risks. These systems must comply with IEC 61010-1 safety requirements for electrical equipment, emphasizing proper insulation, grounding, and voltage containment. Personnel protection protocols include mandatory use of anti-static equipment and implementation of lockout/tagout procedures during maintenance operations.
Surface constraint considerations directly impact safety compliance for both technologies. EPM systems require conductive surface materials, necessitating additional safety measures for electrical conductivity management and potential short-circuit prevention. Electrostatic grippers demand specific surface resistivity ranges, requiring careful material selection and surface treatment protocols to maintain safe operating parameters while preventing electrostatic discharge incidents.
Risk assessment methodologies, as outlined in ISO 12100, mandate comprehensive hazard identification for both gripping technologies. This includes evaluation of mechanical hazards from grip failure, electrical hazards from power systems, and environmental factors affecting surface interactions. Emergency stop systems, safety interlocks, and operator training programs constitute essential safety infrastructure components.
Regular safety audits and compliance verification ensure continued adherence to evolving standards, particularly as surface constraint requirements may change with different workpiece materials and environmental conditions.
Material Compatibility Assessment for Gripping Applications
Material compatibility represents a fundamental consideration when selecting between EPM and electrostatic grippers, as each technology exhibits distinct interaction characteristics with different substrate materials. The gripping effectiveness and reliability of both systems depend heavily on the physical and electrical properties of target materials, creating specific application boundaries that must be carefully evaluated.
EPM grippers demonstrate exceptional compatibility with ferromagnetic materials including steel, iron, and nickel-based alloys. These materials provide optimal magnetic flux pathways, enabling maximum holding force generation. However, EPM systems show limited effectiveness with non-ferromagnetic materials such as aluminum, copper, brass, and composite materials. While some EPM designs incorporate specialized pole configurations to handle thin non-ferromagnetic sheets placed over ferromagnetic backing plates, this approach significantly restricts application flexibility.
Electrostatic grippers exhibit broader material compatibility, effectively handling both conductive and non-conductive substrates through different operational mechanisms. For conductive materials like metals, electrostatic systems utilize coulombic attraction between charged electrodes and induced surface charges. Non-conductive materials including plastics, ceramics, glass, and composite materials can be gripped through dielectric polarization effects, where electric fields induce molecular dipole alignment creating attractive forces.
Surface conductivity characteristics significantly influence gripper selection decisions. Materials with intermediate conductivity levels, such as carbon fiber composites or semiconductor wafers, present unique challenges for both technologies. EPM systems may experience reduced effectiveness due to eddy current generation, while electrostatic grippers require careful voltage optimization to prevent electrical breakdown or surface damage.
Thickness constraints vary considerably between the two technologies. EPM grippers typically handle materials ranging from thin sheets to substantial thicknesses, with holding force generally increasing with material thickness up to magnetic saturation limits. Electrostatic systems demonstrate optimal performance with thinner materials, as electrostatic forces diminish rapidly with increasing electrode-to-surface distances, typically limiting effective operation to materials under several millimeters thick.
Surface contamination tolerance differs markedly between technologies. EPM systems maintain functionality despite moderate surface contamination, oil films, or oxidation layers, as magnetic fields can penetrate these barriers. Electrostatic grippers exhibit higher sensitivity to surface conditions, with dust, moisture, or conductive contamination potentially causing performance degradation or electrical shorting issues.
Temperature stability of target materials affects both gripping technologies differently. EPM systems may experience reduced performance with materials approaching Curie temperatures, while electrostatic grippers face challenges with materials exhibiting temperature-dependent dielectric properties or thermal expansion coefficients that alter electrode spacing relationships.
EPM grippers demonstrate exceptional compatibility with ferromagnetic materials including steel, iron, and nickel-based alloys. These materials provide optimal magnetic flux pathways, enabling maximum holding force generation. However, EPM systems show limited effectiveness with non-ferromagnetic materials such as aluminum, copper, brass, and composite materials. While some EPM designs incorporate specialized pole configurations to handle thin non-ferromagnetic sheets placed over ferromagnetic backing plates, this approach significantly restricts application flexibility.
Electrostatic grippers exhibit broader material compatibility, effectively handling both conductive and non-conductive substrates through different operational mechanisms. For conductive materials like metals, electrostatic systems utilize coulombic attraction between charged electrodes and induced surface charges. Non-conductive materials including plastics, ceramics, glass, and composite materials can be gripped through dielectric polarization effects, where electric fields induce molecular dipole alignment creating attractive forces.
Surface conductivity characteristics significantly influence gripper selection decisions. Materials with intermediate conductivity levels, such as carbon fiber composites or semiconductor wafers, present unique challenges for both technologies. EPM systems may experience reduced effectiveness due to eddy current generation, while electrostatic grippers require careful voltage optimization to prevent electrical breakdown or surface damage.
Thickness constraints vary considerably between the two technologies. EPM grippers typically handle materials ranging from thin sheets to substantial thicknesses, with holding force generally increasing with material thickness up to magnetic saturation limits. Electrostatic systems demonstrate optimal performance with thinner materials, as electrostatic forces diminish rapidly with increasing electrode-to-surface distances, typically limiting effective operation to materials under several millimeters thick.
Surface contamination tolerance differs markedly between technologies. EPM systems maintain functionality despite moderate surface contamination, oil films, or oxidation layers, as magnetic fields can penetrate these barriers. Electrostatic grippers exhibit higher sensitivity to surface conditions, with dust, moisture, or conductive contamination potentially causing performance degradation or electrical shorting issues.
Temperature stability of target materials affects both gripping technologies differently. EPM systems may experience reduced performance with materials approaching Curie temperatures, while electrostatic grippers face challenges with materials exhibiting temperature-dependent dielectric properties or thermal expansion coefficients that alter electrode spacing relationships.
Unlock deeper insights with PatSnap Eureka Quick Research — get a full tech report to explore trends and direct your research. Try now!
Generate Your Research Report Instantly with AI Agent
Supercharge your innovation with PatSnap Eureka AI Agent Platform!