

Comparing Cable-Driven Robots vs. Magnet-Based Systems in Reliability
APR 30, 20269 MIN READ
Generate Your Research Report Instantly with AI Agent
PatSnap Eureka helps you evaluate technical feasibility & market potential.
Cable-Driven vs Magnet-Based Robot Technology Background
Cable-driven robotic systems represent a fundamental approach in robotics that utilizes tensioned cables as the primary means of force transmission and motion control. This technology emerged from the need to create lightweight, high-speed manipulation systems with large working envelopes while maintaining precision. The core principle involves multiple cables connected to an end-effector, where coordinated tension control enables precise positioning and force application across multiple degrees of freedom.
The development of cable-driven robots traces back to the 1980s when researchers began exploring alternatives to traditional rigid-link manipulators. Early implementations focused on parallel cable configurations for large-scale applications such as construction and material handling. The technology gained significant momentum in the 1990s with advances in real-time control systems and tension sensing capabilities, enabling more sophisticated applications in manufacturing and research environments.
Magnet-based robotic systems, in contrast, leverage magnetic forces for actuation, positioning, and manipulation tasks. These systems exploit the fundamental properties of magnetic fields to achieve contactless operation, eliminating mechanical wear and reducing maintenance requirements. The technology encompasses various implementations, including electromagnetic actuators, permanent magnet arrays, and hybrid magnetic-mechanical systems designed for specific operational requirements.
The evolution of magnetic robotics accelerated with the development of rare-earth permanent magnets and advanced electromagnetic control systems in the late 20th century. Modern magnet-based systems incorporate sophisticated field control algorithms and high-precision magnetic sensors, enabling applications ranging from micro-manipulation to large-scale industrial automation. The technology has found particular success in clean room environments, medical applications, and precision manufacturing where contamination control is critical.
Both technologies have evolved to address specific operational challenges and application requirements. Cable-driven systems excel in applications requiring large workspace coverage, high payload capacity, and rapid reconfiguration capabilities. Their modular nature allows for scalable implementations across diverse industrial sectors, from warehouse automation to entertainment industry applications such as camera positioning systems.
Magnet-based systems have carved out specialized niches where their unique advantages become paramount. The contactless nature of magnetic actuation eliminates friction-related wear, reduces noise generation, and enables operation in sterile or hazardous environments. Recent advances in superconducting magnets and magnetic levitation technologies have expanded the potential applications into high-precision positioning and vibration isolation systems.
The reliability comparison between these technologies has become increasingly relevant as industries seek robust automation solutions. Understanding the fundamental technological backgrounds of both approaches provides the foundation for evaluating their respective strengths, limitations, and optimal application domains in modern robotic implementations.
The development of cable-driven robots traces back to the 1980s when researchers began exploring alternatives to traditional rigid-link manipulators. Early implementations focused on parallel cable configurations for large-scale applications such as construction and material handling. The technology gained significant momentum in the 1990s with advances in real-time control systems and tension sensing capabilities, enabling more sophisticated applications in manufacturing and research environments.
Magnet-based robotic systems, in contrast, leverage magnetic forces for actuation, positioning, and manipulation tasks. These systems exploit the fundamental properties of magnetic fields to achieve contactless operation, eliminating mechanical wear and reducing maintenance requirements. The technology encompasses various implementations, including electromagnetic actuators, permanent magnet arrays, and hybrid magnetic-mechanical systems designed for specific operational requirements.
The evolution of magnetic robotics accelerated with the development of rare-earth permanent magnets and advanced electromagnetic control systems in the late 20th century. Modern magnet-based systems incorporate sophisticated field control algorithms and high-precision magnetic sensors, enabling applications ranging from micro-manipulation to large-scale industrial automation. The technology has found particular success in clean room environments, medical applications, and precision manufacturing where contamination control is critical.
Both technologies have evolved to address specific operational challenges and application requirements. Cable-driven systems excel in applications requiring large workspace coverage, high payload capacity, and rapid reconfiguration capabilities. Their modular nature allows for scalable implementations across diverse industrial sectors, from warehouse automation to entertainment industry applications such as camera positioning systems.
Magnet-based systems have carved out specialized niches where their unique advantages become paramount. The contactless nature of magnetic actuation eliminates friction-related wear, reduces noise generation, and enables operation in sterile or hazardous environments. Recent advances in superconducting magnets and magnetic levitation technologies have expanded the potential applications into high-precision positioning and vibration isolation systems.
The reliability comparison between these technologies has become increasingly relevant as industries seek robust automation solutions. Understanding the fundamental technological backgrounds of both approaches provides the foundation for evaluating their respective strengths, limitations, and optimal application domains in modern robotic implementations.
Market Demand for High-Reliability Robotic Systems
The global robotics market is experiencing unprecedented growth driven by increasing demands for automation across multiple industries. Manufacturing sectors, particularly automotive, electronics, and precision assembly, require robotic systems that can operate continuously with minimal downtime. These applications demand reliability rates exceeding traditional industrial standards, as system failures can result in significant production losses and safety hazards.
Healthcare robotics represents another critical market segment where reliability is paramount. Surgical robots, rehabilitation devices, and patient care systems must demonstrate exceptional dependability to ensure patient safety and regulatory compliance. The aging global population and rising healthcare costs are accelerating adoption of robotic solutions, creating substantial market opportunities for highly reliable systems.
Aerospace and defense applications constitute a specialized but lucrative market segment requiring extreme reliability standards. These environments demand robotic systems capable of operating in harsh conditions with minimal maintenance opportunities. Space exploration missions, military operations, and critical infrastructure maintenance applications cannot tolerate system failures, driving demand for proven reliability technologies.
The logistics and warehousing sector has emerged as a major growth driver, with e-commerce expansion creating massive demand for automated sorting, picking, and packaging systems. These operations require robots that can function reliably across extended operational periods, as downtime directly impacts customer satisfaction and operational efficiency.
Market research indicates that reliability concerns significantly influence purchasing decisions, with end users willing to pay premium prices for systems demonstrating superior dependability. This trend is particularly pronounced in industries where robotic failures can result in safety incidents, production disruptions, or regulatory violations.
Emerging applications in service robotics, including cleaning, security, and personal assistance, are expanding the addressable market for reliable robotic systems. These applications often operate in unstructured environments where system robustness becomes critical for commercial viability.
The competitive landscape increasingly favors manufacturers who can demonstrate quantifiable reliability advantages through comprehensive testing, field performance data, and robust design methodologies. Market differentiation based on reliability metrics is becoming a key strategic advantage in securing long-term customer relationships and premium pricing positions.
Healthcare robotics represents another critical market segment where reliability is paramount. Surgical robots, rehabilitation devices, and patient care systems must demonstrate exceptional dependability to ensure patient safety and regulatory compliance. The aging global population and rising healthcare costs are accelerating adoption of robotic solutions, creating substantial market opportunities for highly reliable systems.
Aerospace and defense applications constitute a specialized but lucrative market segment requiring extreme reliability standards. These environments demand robotic systems capable of operating in harsh conditions with minimal maintenance opportunities. Space exploration missions, military operations, and critical infrastructure maintenance applications cannot tolerate system failures, driving demand for proven reliability technologies.
The logistics and warehousing sector has emerged as a major growth driver, with e-commerce expansion creating massive demand for automated sorting, picking, and packaging systems. These operations require robots that can function reliably across extended operational periods, as downtime directly impacts customer satisfaction and operational efficiency.
Market research indicates that reliability concerns significantly influence purchasing decisions, with end users willing to pay premium prices for systems demonstrating superior dependability. This trend is particularly pronounced in industries where robotic failures can result in safety incidents, production disruptions, or regulatory violations.
Emerging applications in service robotics, including cleaning, security, and personal assistance, are expanding the addressable market for reliable robotic systems. These applications often operate in unstructured environments where system robustness becomes critical for commercial viability.
The competitive landscape increasingly favors manufacturers who can demonstrate quantifiable reliability advantages through comprehensive testing, field performance data, and robust design methodologies. Market differentiation based on reliability metrics is becoming a key strategic advantage in securing long-term customer relationships and premium pricing positions.
Current Reliability Challenges in Cable and Magnetic Robots
Cable-driven robotic systems face significant reliability challenges primarily stemming from cable wear, fatigue, and tension management issues. The continuous flexing and stretching of cables during operation leads to gradual degradation of cable materials, particularly at connection points and routing mechanisms. Cable fraying, strand breakage, and eventual complete failure represent critical failure modes that can compromise system functionality and safety. Additionally, maintaining consistent cable tension across multiple actuators presents ongoing challenges, as tension variations can result in positioning inaccuracies and reduced system performance.
Magnetic-based robotic systems encounter distinct reliability challenges related to electromagnetic interference, thermal effects, and magnetic field stability. Electromagnetic interference from external sources can disrupt precise control algorithms and positioning accuracy, particularly in industrial environments with high electrical noise. Temperature fluctuations significantly impact magnetic field strength and consistency, leading to variations in actuator performance and potential system drift over extended operation periods.
Power consumption variability represents another critical challenge for magnetic systems, as maintaining strong magnetic fields requires substantial and consistent electrical power. Sudden power fluctuations or supply interruptions can cause immediate loss of magnetic holding force, potentially resulting in catastrophic system failures. The complexity of magnetic field control systems also introduces additional failure points through sophisticated electronic control circuits and sensors.
Both system types struggle with environmental sensitivity issues that affect long-term reliability. Cable systems are susceptible to contamination, moisture ingress, and mechanical damage from external impacts. Magnetic systems face challenges from ferromagnetic debris attraction, which can interfere with precise magnetic field generation and control.
Maintenance accessibility presents ongoing challenges for both technologies. Cable systems require regular inspection and replacement of worn components, while magnetic systems demand periodic calibration and electromagnetic field verification. The integration of condition monitoring systems remains technically challenging and economically demanding for both approaches.
Predictive maintenance implementation faces obstacles in both technologies due to the complexity of failure mode prediction. Cable systems require sophisticated tension monitoring and wear detection capabilities, while magnetic systems need advanced thermal and electromagnetic field monitoring to anticipate potential failures before they occur.
Magnetic-based robotic systems encounter distinct reliability challenges related to electromagnetic interference, thermal effects, and magnetic field stability. Electromagnetic interference from external sources can disrupt precise control algorithms and positioning accuracy, particularly in industrial environments with high electrical noise. Temperature fluctuations significantly impact magnetic field strength and consistency, leading to variations in actuator performance and potential system drift over extended operation periods.
Power consumption variability represents another critical challenge for magnetic systems, as maintaining strong magnetic fields requires substantial and consistent electrical power. Sudden power fluctuations or supply interruptions can cause immediate loss of magnetic holding force, potentially resulting in catastrophic system failures. The complexity of magnetic field control systems also introduces additional failure points through sophisticated electronic control circuits and sensors.
Both system types struggle with environmental sensitivity issues that affect long-term reliability. Cable systems are susceptible to contamination, moisture ingress, and mechanical damage from external impacts. Magnetic systems face challenges from ferromagnetic debris attraction, which can interfere with precise magnetic field generation and control.
Maintenance accessibility presents ongoing challenges for both technologies. Cable systems require regular inspection and replacement of worn components, while magnetic systems demand periodic calibration and electromagnetic field verification. The integration of condition monitoring systems remains technically challenging and economically demanding for both approaches.
Predictive maintenance implementation faces obstacles in both technologies due to the complexity of failure mode prediction. Cable systems require sophisticated tension monitoring and wear detection capabilities, while magnetic systems need advanced thermal and electromagnetic field monitoring to anticipate potential failures before they occur.
Existing Reliability Enhancement Solutions for Both Systems
01 Cable tension control and monitoring systems
Advanced systems for monitoring and controlling cable tension in cable-driven robots to ensure reliable operation. These systems utilize sensors and feedback mechanisms to maintain optimal cable tension, preventing slack or over-tensioning that could lead to system failure. Real-time monitoring capabilities allow for immediate adjustments and fault detection to maintain system reliability.- Cable tension control and monitoring systems: Advanced systems for monitoring and controlling cable tension in cable-driven robots to ensure reliable operation. These systems utilize sensors and feedback mechanisms to maintain optimal cable tension, prevent slack, and detect potential failures. The technology includes real-time monitoring algorithms and automatic adjustment mechanisms to compensate for cable stretch, wear, and environmental factors that could affect system reliability.
- Magnetic positioning and control mechanisms: Implementation of magnetic systems for precise positioning and control in robotic applications. These mechanisms provide contactless operation, reduced wear, and improved reliability through magnetic field control. The technology encompasses permanent magnet arrangements, electromagnetic actuators, and magnetic sensing systems that enable accurate positioning without mechanical contact, thereby reducing maintenance requirements and extending system lifespan.
- Fault detection and diagnostic systems: Comprehensive fault detection and diagnostic capabilities for cable-driven and magnetic systems to enhance reliability. These systems employ various sensing technologies and algorithms to identify potential failures before they occur, monitor system health, and provide predictive maintenance capabilities. The diagnostic systems can detect cable wear, magnetic field variations, and other parameters critical to system reliability.
- Redundancy and fail-safe mechanisms: Design approaches incorporating redundancy and fail-safe mechanisms to ensure continued operation even when individual components fail. These systems include backup cable arrangements, redundant magnetic actuators, and emergency stop mechanisms. The technology focuses on graceful degradation of performance rather than complete system failure, ensuring safety and reliability in critical applications.
- Integration and hybrid system architectures: Advanced architectures that combine cable-driven mechanisms with magnetic systems to leverage the advantages of both technologies. These hybrid systems optimize performance, reliability, and efficiency by strategically utilizing cables for force transmission and magnets for precise positioning or contactless operation. The integration approaches address compatibility issues and optimize the interaction between different subsystems.
02 Magnetic positioning and control mechanisms
Implementation of magnetic systems for precise positioning and control in robotic applications. These mechanisms provide contactless operation and reduced mechanical wear, enhancing system longevity and reliability. Magnetic control systems offer smooth operation with minimal maintenance requirements while providing accurate positioning capabilities.Expand Specific Solutions03 Fault detection and diagnostic systems
Comprehensive diagnostic systems designed to detect and analyze potential failures in cable-driven and magnetic robotic systems. These systems employ various sensing technologies and algorithms to identify anomalies, predict maintenance needs, and prevent catastrophic failures. Early warning systems enable proactive maintenance and improve overall system reliability.Expand Specific Solutions04 Redundancy and backup systems
Implementation of redundant components and backup systems to ensure continued operation in case of primary system failure. These designs incorporate multiple cable paths, backup magnetic systems, or alternative control mechanisms to maintain functionality when individual components fail. Redundancy strategies significantly improve overall system reliability and safety.Expand Specific Solutions05 Material durability and wear resistance
Development of advanced materials and coatings for cables and magnetic components to enhance durability and reduce wear in robotic systems. These materials are designed to withstand repeated stress cycles, environmental conditions, and operational loads while maintaining performance characteristics. Improved material properties directly contribute to extended system lifespan and reduced maintenance requirements.Expand Specific Solutions
Key Players in Cable-Driven and Magnetic Robotics Industry
The competitive landscape for cable-driven robots versus magnet-based systems in reliability applications is in an emerging growth phase, with the market expanding across industrial automation, medical robotics, and precision manufacturing sectors. The technology demonstrates moderate to high maturity levels, evidenced by established players like FANUC Corp., ABB Ltd., and YASKAWA Electric Corp. leading industrial automation solutions, while Sony Group Corp. and DENSO Corp. drive consumer and automotive applications. Research institutions including Harbin Institute of Technology, Tianjin University, and The Chinese University of Hong Kong are advancing fundamental technologies, particularly in cable-driven mechanisms and magnetic actuation systems. Companies like Exonetik Inc. are pioneering magnetorheological actuators, while traditional automation leaders are integrating both technologies into hybrid systems, indicating a maturing market with increasing reliability standards and diverse application potential.
Sony Group Corp.
Technical Solution: Sony has developed hybrid robotic systems that combine both cable-driven and magnetic technologies for enhanced reliability in consumer and professional applications. Their approach utilizes magnetic positioning for coarse movements and cable-driven mechanisms for fine precision tasks. Sony's reliability strategy focuses on redundant system architecture where magnetic systems serve as backup when cable components require maintenance. The company has implemented advanced materials science in cable design, using carbon fiber composites and specialized coatings to extend cable lifespan. Their magnetic components utilize rare-earth permanent magnets with temperature compensation algorithms to maintain consistent performance across varying environmental conditions. Sony's systems feature intelligent switching between cable and magnetic modes based on task requirements and component health status.
Strengths: Hybrid redundancy, advanced materials, intelligent mode switching, consumer-grade reliability. Weaknesses: System complexity, higher component costs, potential mode-switching delays during operation.
FANUC Corp.
Technical Solution: FANUC has developed advanced cable-driven robotic systems for industrial automation, focusing on high-precision manufacturing applications. Their cable-driven robots utilize proprietary tension control algorithms and redundant cable configurations to ensure consistent performance. The company has implemented real-time monitoring systems that track cable wear, tension variations, and environmental factors affecting reliability. FANUC's approach includes predictive maintenance protocols that analyze cable fatigue patterns and optimize replacement schedules. Their systems demonstrate superior reliability in controlled industrial environments with structured maintenance programs, achieving operational uptime rates exceeding 98% in manufacturing facilities.
Strengths: Proven industrial reliability, advanced predictive maintenance, excellent precision control. Weaknesses: High maintenance requirements, complex cable replacement procedures, limited flexibility in unstructured environments.
Core Patents in Cable-Driven vs Magnetic Robot Reliability
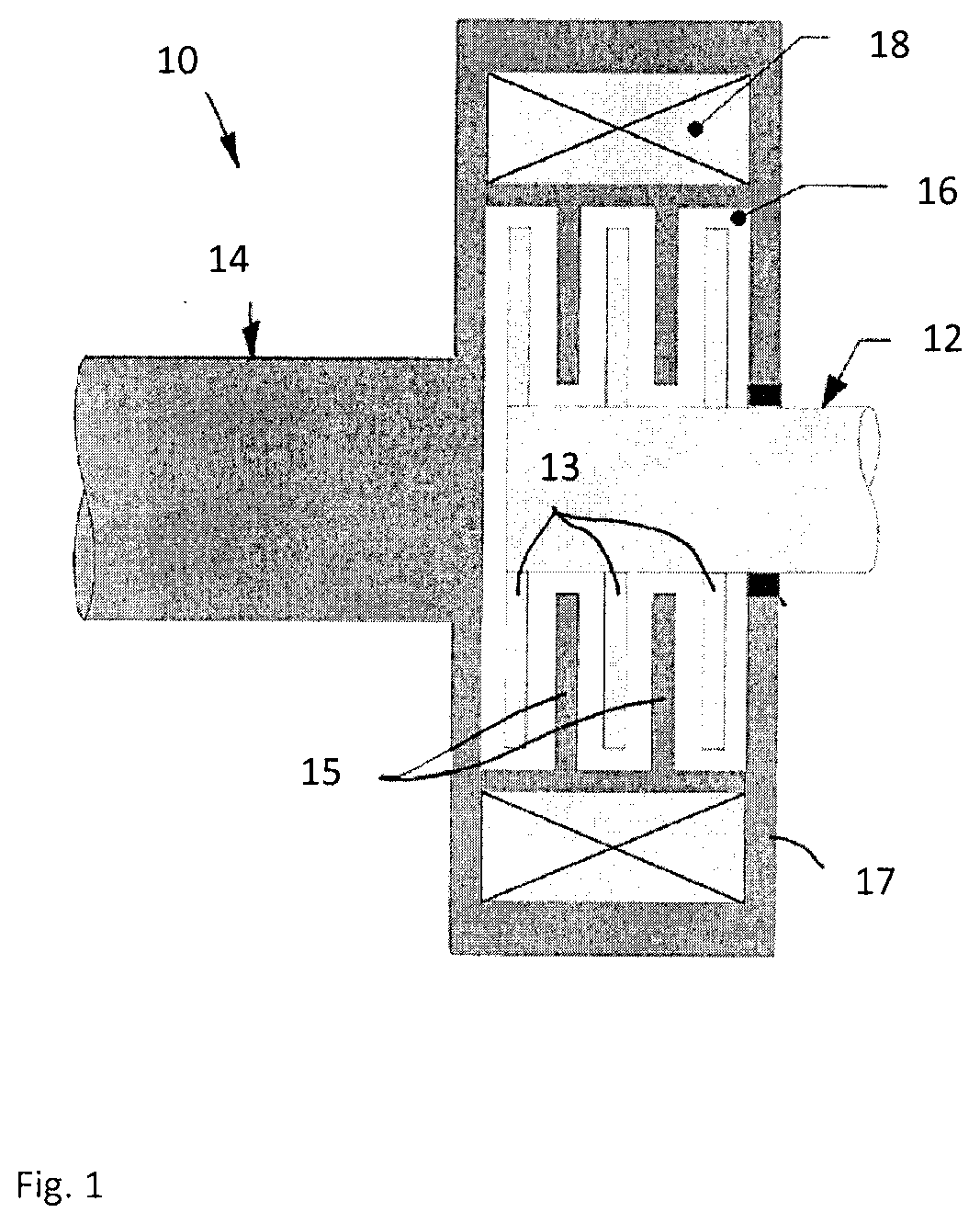
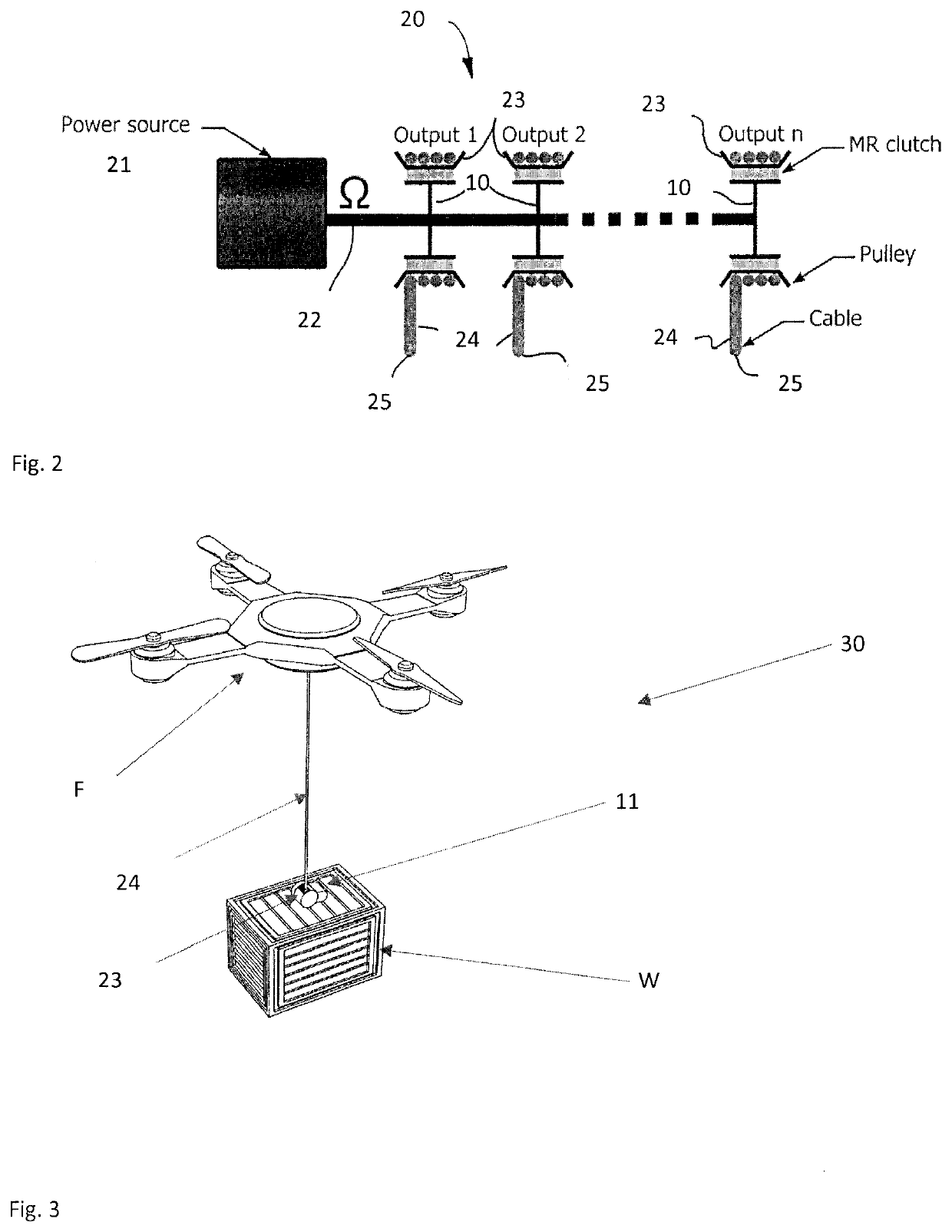
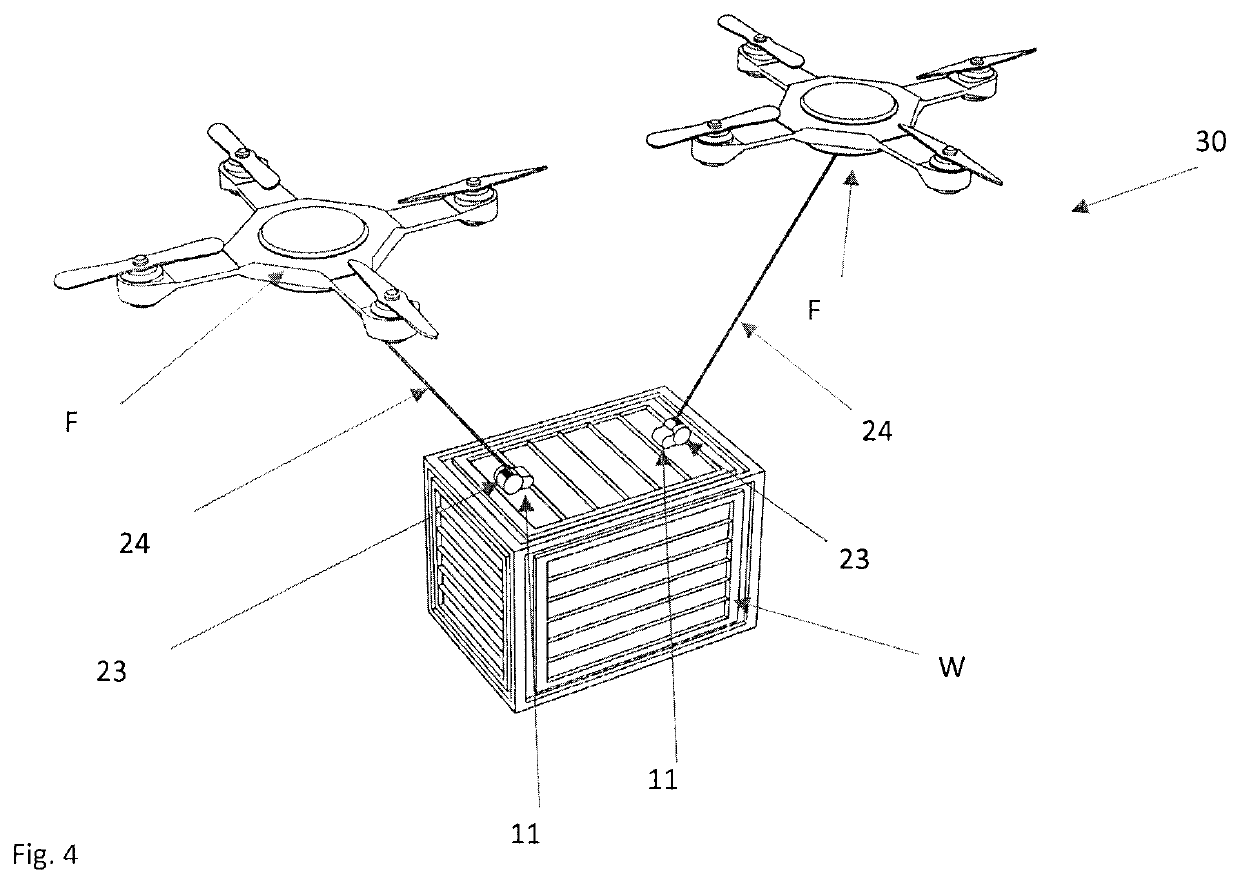
Tethered payload motion control and cable robot using magnetorheological actuators
PatentActiveUS20200182310A1
Innovation
- A system utilizing magnetorheological (MR) fluid actuators and clutches, coupled with sensors and a controller, to dynamically control the tension in tethers between objects and loads, allowing for variable torque transmission and real-time adjustment based on the relation between the object and load, thereby isolating the payload from unwanted accelerations and velocities.

Electronic demarcating system
PatentInactiveEP1512053B1
Innovation
- An electronic directing system that uses a first electrical cable connected to a signal generator transmitting a current with periodic characteristic pulses, allowing the sensing system to synchronize with the pulses and differentiate between intended and external magnetic fields, thereby reducing interference and energy consumption.




Safety Standards for Cable-Driven and Magnetic Robots
Safety standards for cable-driven and magnetic robotic systems have evolved through distinct regulatory pathways, reflecting the unique operational characteristics and risk profiles of each technology. Cable-driven robots primarily fall under mechanical safety frameworks established by ISO 10218 and ISO 13482, which address physical hazards associated with moving mechanical components, cable tension failures, and workspace intrusion scenarios.
The International Electrotechnical Commission (IEC) has developed specific guidelines for cable-driven systems focusing on cable integrity monitoring, emergency stop mechanisms, and fail-safe positioning protocols. These standards mandate continuous tension monitoring systems capable of detecting cable degradation, fraying, or sudden load changes within milliseconds. Additionally, redundant cable configurations are required for applications involving human proximity or critical infrastructure operations.
Magnetic robotic systems operate under electromagnetic compatibility (EMC) standards defined by IEC 61000 series, addressing both safety and interference concerns. These regulations establish strict limits on magnetic field exposure, particularly in medical and industrial environments where sensitive equipment or personnel may be affected. The FDA and CE marking requirements further specify magnetic field strength thresholds and containment protocols for different operational zones.
Functional safety standards such as IEC 61508 and ISO 26262 provide frameworks for both technologies, emphasizing systematic hazard analysis and risk assessment methodologies. For cable-driven systems, Safety Integrity Level (SIL) requirements focus on mechanical failure modes, while magnetic systems prioritize electromagnetic interference and field containment failures.
Recent developments in safety standardization include the emergence of hybrid system protocols that address scenarios where cable-driven and magnetic technologies operate in shared environments. The International Organization for Standardization is currently developing ISO 23482, which specifically addresses multi-modal robotic systems and their interaction safety requirements.
Certification processes differ significantly between the two technologies, with cable-driven systems requiring extensive mechanical testing and fatigue analysis, while magnetic systems undergo electromagnetic field mapping and biological exposure assessments. Both technologies must demonstrate compliance with general machinery safety directives and undergo regular safety audits to maintain operational certification.
The International Electrotechnical Commission (IEC) has developed specific guidelines for cable-driven systems focusing on cable integrity monitoring, emergency stop mechanisms, and fail-safe positioning protocols. These standards mandate continuous tension monitoring systems capable of detecting cable degradation, fraying, or sudden load changes within milliseconds. Additionally, redundant cable configurations are required for applications involving human proximity or critical infrastructure operations.
Magnetic robotic systems operate under electromagnetic compatibility (EMC) standards defined by IEC 61000 series, addressing both safety and interference concerns. These regulations establish strict limits on magnetic field exposure, particularly in medical and industrial environments where sensitive equipment or personnel may be affected. The FDA and CE marking requirements further specify magnetic field strength thresholds and containment protocols for different operational zones.
Functional safety standards such as IEC 61508 and ISO 26262 provide frameworks for both technologies, emphasizing systematic hazard analysis and risk assessment methodologies. For cable-driven systems, Safety Integrity Level (SIL) requirements focus on mechanical failure modes, while magnetic systems prioritize electromagnetic interference and field containment failures.
Recent developments in safety standardization include the emergence of hybrid system protocols that address scenarios where cable-driven and magnetic technologies operate in shared environments. The International Organization for Standardization is currently developing ISO 23482, which specifically addresses multi-modal robotic systems and their interaction safety requirements.
Certification processes differ significantly between the two technologies, with cable-driven systems requiring extensive mechanical testing and fatigue analysis, while magnetic systems undergo electromagnetic field mapping and biological exposure assessments. Both technologies must demonstrate compliance with general machinery safety directives and undergo regular safety audits to maintain operational certification.
Failure Mode Analysis and Predictive Maintenance Strategies
Cable-driven robotic systems exhibit distinct failure modes compared to magnet-based systems, primarily centered around mechanical wear and tension management. The most critical failure modes in cable-driven systems include cable fatigue and breakage, pulley bearing degradation, and tension loss due to cable stretching or slippage. These failures typically manifest gradually, making them suitable candidates for condition-based monitoring approaches that track cable tension variations, vibration patterns, and motor current signatures.
Magnet-based systems present fundamentally different failure characteristics, with electromagnetic coil degradation, permanent magnet demagnetization, and thermal-induced performance drift representing primary concerns. Unlike cable systems, magnetic failures often occur more abruptly, particularly in cases of coil burnout or sudden demagnetization events. However, thermal degradation and gradual magnetic field weakening provide observable precursors for predictive maintenance interventions.
Predictive maintenance strategies for cable-driven robots leverage real-time tension monitoring through load cells and strain gauges integrated into the cable routing system. Advanced algorithms analyze tension distribution patterns and detect anomalies indicating impending cable failure or pulley wear. Vibration analysis using accelerometers positioned at critical joints provides early warning of bearing deterioration and mechanical misalignment. Machine learning models trained on historical performance data can predict remaining useful life of cables based on usage patterns, environmental conditions, and measured degradation indicators.
For magnet-based systems, predictive maintenance relies heavily on electromagnetic field monitoring and thermal management. Hall effect sensors continuously measure magnetic field strength variations, enabling detection of gradual demagnetization before system performance degrades significantly. Thermal imaging and embedded temperature sensors monitor coil operating temperatures, preventing overheating-induced failures. Current signature analysis identifies insulation breakdown and inter-turn short circuits in electromagnetic coils before complete failure occurs.
The reliability comparison reveals that cable-driven systems offer more predictable failure progression, enabling longer maintenance intervals when properly monitored. Magnet-based systems, while potentially more durable under optimal conditions, require more sophisticated monitoring infrastructure to detect the subtle precursors of electromagnetic failures. Both systems benefit from digital twin implementations that simulate wear patterns and optimize maintenance scheduling based on actual operating conditions and performance requirements.
Magnet-based systems present fundamentally different failure characteristics, with electromagnetic coil degradation, permanent magnet demagnetization, and thermal-induced performance drift representing primary concerns. Unlike cable systems, magnetic failures often occur more abruptly, particularly in cases of coil burnout or sudden demagnetization events. However, thermal degradation and gradual magnetic field weakening provide observable precursors for predictive maintenance interventions.
Predictive maintenance strategies for cable-driven robots leverage real-time tension monitoring through load cells and strain gauges integrated into the cable routing system. Advanced algorithms analyze tension distribution patterns and detect anomalies indicating impending cable failure or pulley wear. Vibration analysis using accelerometers positioned at critical joints provides early warning of bearing deterioration and mechanical misalignment. Machine learning models trained on historical performance data can predict remaining useful life of cables based on usage patterns, environmental conditions, and measured degradation indicators.
For magnet-based systems, predictive maintenance relies heavily on electromagnetic field monitoring and thermal management. Hall effect sensors continuously measure magnetic field strength variations, enabling detection of gradual demagnetization before system performance degrades significantly. Thermal imaging and embedded temperature sensors monitor coil operating temperatures, preventing overheating-induced failures. Current signature analysis identifies insulation breakdown and inter-turn short circuits in electromagnetic coils before complete failure occurs.
The reliability comparison reveals that cable-driven systems offer more predictable failure progression, enabling longer maintenance intervals when properly monitored. Magnet-based systems, while potentially more durable under optimal conditions, require more sophisticated monitoring infrastructure to detect the subtle precursors of electromagnetic failures. Both systems benefit from digital twin implementations that simulate wear patterns and optimize maintenance scheduling based on actual operating conditions and performance requirements.
Unlock deeper insights with PatSnap Eureka Quick Research — get a full tech report to explore trends and direct your research. Try now!
Generate Your Research Report Instantly with AI Agent
Supercharge your innovation with PatSnap Eureka AI Agent Platform!