Comparing Simulation Software for Industrial Robot Testing
APR 2, 20269 MIN READ
Generate Your Research Report Instantly with AI Agent
Patsnap Eureka helps you evaluate technical feasibility & market potential.
Robot Simulation Software Evolution and Testing Goals
The evolution of robot simulation software traces back to the early 1980s when industrial automation began demanding more sophisticated programming and testing methodologies. Initial simulation tools were primarily 2D visualization systems that offered basic trajectory planning capabilities. These early platforms focused on collision detection and simple kinematic modeling, serving as rudimentary programming aids for industrial robot operators.
The 1990s marked a significant transition toward 3D simulation environments, driven by advances in computer graphics and computational power. Software packages began incorporating more realistic physics engines, enabling accurate representation of robot dynamics and environmental interactions. This period witnessed the emergence of specialized simulation platforms designed specifically for industrial robot applications, moving beyond general-purpose CAD systems.
The millennium brought revolutionary changes with the integration of advanced physics simulation, real-time rendering, and comprehensive sensor modeling. Modern simulation software evolved to support complex multi-robot systems, incorporating sophisticated algorithms for path planning, collision avoidance, and dynamic response prediction. The introduction of virtual commissioning capabilities transformed simulation from a programming tool into a comprehensive testing environment.
Contemporary robot simulation platforms have established ambitious testing goals centered on achieving near-perfect fidelity between virtual and real-world performance. Primary objectives include validating robot programs before physical implementation, optimizing cycle times through iterative testing, and ensuring safety compliance across diverse operational scenarios. These systems aim to reduce commissioning time by up to 80% while minimizing costly physical prototyping phases.
Current testing goals emphasize comprehensive validation of robot behavior under various environmental conditions, including temperature variations, payload changes, and dynamic obstacles. Advanced simulation platforms target seamless integration with manufacturing execution systems, enabling continuous validation throughout the product lifecycle. The ultimate objective involves creating digital twins that provide predictive maintenance capabilities and real-time performance optimization, establishing simulation as an integral component of Industry 4.0 manufacturing ecosystems.
The 1990s marked a significant transition toward 3D simulation environments, driven by advances in computer graphics and computational power. Software packages began incorporating more realistic physics engines, enabling accurate representation of robot dynamics and environmental interactions. This period witnessed the emergence of specialized simulation platforms designed specifically for industrial robot applications, moving beyond general-purpose CAD systems.
The millennium brought revolutionary changes with the integration of advanced physics simulation, real-time rendering, and comprehensive sensor modeling. Modern simulation software evolved to support complex multi-robot systems, incorporating sophisticated algorithms for path planning, collision avoidance, and dynamic response prediction. The introduction of virtual commissioning capabilities transformed simulation from a programming tool into a comprehensive testing environment.
Contemporary robot simulation platforms have established ambitious testing goals centered on achieving near-perfect fidelity between virtual and real-world performance. Primary objectives include validating robot programs before physical implementation, optimizing cycle times through iterative testing, and ensuring safety compliance across diverse operational scenarios. These systems aim to reduce commissioning time by up to 80% while minimizing costly physical prototyping phases.
Current testing goals emphasize comprehensive validation of robot behavior under various environmental conditions, including temperature variations, payload changes, and dynamic obstacles. Advanced simulation platforms target seamless integration with manufacturing execution systems, enabling continuous validation throughout the product lifecycle. The ultimate objective involves creating digital twins that provide predictive maintenance capabilities and real-time performance optimization, establishing simulation as an integral component of Industry 4.0 manufacturing ecosystems.
Market Demand for Industrial Robot Simulation Solutions
The global industrial automation sector is experiencing unprecedented growth, driving substantial demand for sophisticated simulation solutions that enable comprehensive robot testing without physical hardware constraints. Manufacturing industries across automotive, electronics, aerospace, and consumer goods sectors are increasingly recognizing simulation software as essential infrastructure for reducing development costs, accelerating time-to-market, and minimizing operational risks associated with robot deployment.
Traditional robot testing methodologies involving physical prototypes and real-world environments present significant limitations including high costs, safety concerns, and extended development cycles. These constraints have created a compelling market opportunity for virtual testing environments that can replicate complex industrial scenarios with high fidelity. The demand is particularly pronounced among manufacturers seeking to validate robot performance across multiple operational parameters before committing to expensive physical implementations.
Small and medium enterprises represent a rapidly expanding market segment for industrial robot simulation solutions. These organizations often lack the resources for extensive physical testing facilities but require robust validation capabilities to compete effectively. Cloud-based simulation platforms and subscription-based licensing models have made advanced testing capabilities accessible to this previously underserved market segment, significantly expanding the total addressable market.
The automotive industry continues to be the largest consumer of industrial robot simulation solutions, driven by complex assembly line requirements and stringent quality standards. However, emerging sectors including food processing, pharmaceuticals, and logistics are demonstrating accelerating adoption rates. The rise of collaborative robots and human-robot interaction scenarios has created additional demand for simulation environments capable of modeling complex safety protocols and ergonomic considerations.
Geographical demand patterns reveal strong growth in Asia-Pacific regions, particularly China and Southeast Asian countries, where rapid industrialization and government initiatives supporting automation adoption are driving market expansion. European markets demonstrate steady demand focused on precision manufacturing applications, while North American markets show increasing interest in flexible manufacturing systems and Industry 4.0 implementations.
The integration of artificial intelligence and machine learning capabilities into simulation platforms has created new market opportunities for predictive testing and autonomous optimization scenarios. Organizations are increasingly seeking solutions that can simulate not only mechanical robot operations but also intelligent decision-making processes and adaptive behaviors in dynamic environments.
Traditional robot testing methodologies involving physical prototypes and real-world environments present significant limitations including high costs, safety concerns, and extended development cycles. These constraints have created a compelling market opportunity for virtual testing environments that can replicate complex industrial scenarios with high fidelity. The demand is particularly pronounced among manufacturers seeking to validate robot performance across multiple operational parameters before committing to expensive physical implementations.
Small and medium enterprises represent a rapidly expanding market segment for industrial robot simulation solutions. These organizations often lack the resources for extensive physical testing facilities but require robust validation capabilities to compete effectively. Cloud-based simulation platforms and subscription-based licensing models have made advanced testing capabilities accessible to this previously underserved market segment, significantly expanding the total addressable market.
The automotive industry continues to be the largest consumer of industrial robot simulation solutions, driven by complex assembly line requirements and stringent quality standards. However, emerging sectors including food processing, pharmaceuticals, and logistics are demonstrating accelerating adoption rates. The rise of collaborative robots and human-robot interaction scenarios has created additional demand for simulation environments capable of modeling complex safety protocols and ergonomic considerations.
Geographical demand patterns reveal strong growth in Asia-Pacific regions, particularly China and Southeast Asian countries, where rapid industrialization and government initiatives supporting automation adoption are driving market expansion. European markets demonstrate steady demand focused on precision manufacturing applications, while North American markets show increasing interest in flexible manufacturing systems and Industry 4.0 implementations.
The integration of artificial intelligence and machine learning capabilities into simulation platforms has created new market opportunities for predictive testing and autonomous optimization scenarios. Organizations are increasingly seeking solutions that can simulate not only mechanical robot operations but also intelligent decision-making processes and adaptive behaviors in dynamic environments.
Current State of Robot Simulation Software Landscape
The industrial robot simulation software landscape has evolved significantly over the past decade, driven by increasing demand for virtual commissioning, offline programming, and digital twin implementations in manufacturing environments. Current market offerings span from comprehensive enterprise solutions to specialized niche applications, each targeting specific aspects of robot testing and validation workflows.
Major commercial platforms dominate the high-end segment, with established players offering integrated environments that combine robot programming, physics simulation, and virtual reality capabilities. These solutions typically provide extensive robot libraries, supporting multiple manufacturer protocols and kinematic models. The enterprise-grade offerings focus on seamless integration with existing manufacturing execution systems and CAD workflows, enabling comprehensive digital factory simulations.
Open-source alternatives have gained substantial traction, particularly in research institutions and smaller organizations seeking cost-effective solutions. These platforms often emphasize modularity and customization capabilities, allowing users to develop specialized testing scenarios and integrate custom algorithms. The open-source ecosystem has fostered rapid innovation in areas such as machine learning integration and cloud-based simulation services.
Specialized simulation tools have emerged to address specific industrial requirements, including safety validation, path optimization, and collaborative robot testing. These focused solutions often provide superior performance in their target domains compared to general-purpose platforms, offering advanced features such as real-time collision detection, dynamic load analysis, and human-robot interaction modeling.
Cloud-based simulation services represent an emerging trend, offering scalable computing resources and collaborative development environments. These platforms enable distributed teams to conduct complex multi-robot simulations without significant local hardware investments, while providing automated testing pipelines and continuous integration capabilities.
The current landscape reveals a clear segmentation between high-fidelity physics-based simulators designed for accurate mechanical behavior prediction and lightweight programming environments optimized for rapid prototyping and operator training. Integration capabilities with industrial communication protocols, real-time operating systems, and hardware-in-the-loop testing configurations have become critical differentiators among competing solutions.
Major commercial platforms dominate the high-end segment, with established players offering integrated environments that combine robot programming, physics simulation, and virtual reality capabilities. These solutions typically provide extensive robot libraries, supporting multiple manufacturer protocols and kinematic models. The enterprise-grade offerings focus on seamless integration with existing manufacturing execution systems and CAD workflows, enabling comprehensive digital factory simulations.
Open-source alternatives have gained substantial traction, particularly in research institutions and smaller organizations seeking cost-effective solutions. These platforms often emphasize modularity and customization capabilities, allowing users to develop specialized testing scenarios and integrate custom algorithms. The open-source ecosystem has fostered rapid innovation in areas such as machine learning integration and cloud-based simulation services.
Specialized simulation tools have emerged to address specific industrial requirements, including safety validation, path optimization, and collaborative robot testing. These focused solutions often provide superior performance in their target domains compared to general-purpose platforms, offering advanced features such as real-time collision detection, dynamic load analysis, and human-robot interaction modeling.
Cloud-based simulation services represent an emerging trend, offering scalable computing resources and collaborative development environments. These platforms enable distributed teams to conduct complex multi-robot simulations without significant local hardware investments, while providing automated testing pipelines and continuous integration capabilities.
The current landscape reveals a clear segmentation between high-fidelity physics-based simulators designed for accurate mechanical behavior prediction and lightweight programming environments optimized for rapid prototyping and operator training. Integration capabilities with industrial communication protocols, real-time operating systems, and hardware-in-the-loop testing configurations have become critical differentiators among competing solutions.
Existing Robot Testing Simulation Methodologies
01 Circuit and system-level simulation tools
Simulation software designed for electronic circuit analysis and system-level modeling enables engineers to verify circuit behavior before physical implementation. These tools provide capabilities for analog, digital, and mixed-signal simulation, allowing designers to test various operating conditions and optimize circuit performance. The software typically includes libraries of standard components and supports hierarchical design methodologies for complex systems.- Circuit and system-level simulation tools: Simulation software designed for electronic circuit analysis and system-level modeling enables engineers to verify circuit behavior before physical implementation. These tools provide capabilities for analog, digital, and mixed-signal simulation, allowing designers to test various operating conditions and optimize performance. The software typically includes libraries of standard components and supports custom model integration for accurate representation of real-world behavior.
- Hardware-software co-simulation platforms: Co-simulation platforms enable simultaneous simulation of hardware and software components in embedded systems. These tools allow developers to validate system functionality by running software code on virtual hardware models, identifying integration issues early in the development cycle. The platforms support various processor architectures and peripheral devices, facilitating comprehensive system verification before hardware prototyping.
- Parallel and distributed simulation frameworks: Advanced simulation frameworks utilize parallel processing and distributed computing to handle large-scale simulations efficiently. These systems partition simulation tasks across multiple processors or computing nodes, significantly reducing simulation time for complex models. The frameworks include synchronization mechanisms and load balancing algorithms to ensure accurate results while maximizing computational resource utilization.
- Model-based simulation and verification environments: Model-based simulation environments provide graphical interfaces for creating system models using block diagrams and state machines. These tools automatically generate simulation code from high-level models, enabling rapid prototyping and iterative design refinement. The environments support formal verification methods to ensure model correctness and compliance with specifications, reducing errors in final implementations.
- Real-time and hardware-in-the-loop simulation systems: Real-time simulation systems execute models at speeds matching actual system operation, enabling hardware-in-the-loop testing where physical components interact with simulated environments. These systems use specialized computing hardware and optimized algorithms to maintain timing accuracy, making them essential for testing control systems, automotive applications, and aerospace systems. The platforms support seamless integration of actual sensors and actuators with virtual models.
02 Hardware-software co-simulation platforms
Co-simulation platforms enable simultaneous simulation of hardware and software components in embedded systems. These tools allow developers to validate system functionality by modeling the interaction between hardware architectures and software execution. The platforms support debugging and performance analysis across hardware-software boundaries, facilitating early detection of integration issues and optimization of system-level performance.Expand Specific Solutions03 Parallel and distributed simulation frameworks
Advanced simulation frameworks utilize parallel processing and distributed computing architectures to handle large-scale simulations efficiently. These systems partition simulation tasks across multiple processors or computing nodes to reduce execution time for complex models. The frameworks include synchronization mechanisms and load balancing algorithms to ensure accurate results while maximizing computational throughput.Expand Specific Solutions04 Model-based simulation and verification environments
Model-based simulation environments provide graphical interfaces and high-level abstractions for creating and testing system models. These tools support various modeling languages and standards, enabling rapid prototyping and verification of system designs. The environments include automated test generation, coverage analysis, and formal verification capabilities to ensure design correctness and completeness.Expand Specific Solutions05 Real-time and hardware-in-the-loop simulation systems
Real-time simulation systems enable testing of control systems and embedded software with actual hardware components in the loop. These platforms provide deterministic execution with precise timing characteristics, allowing validation of time-critical systems under realistic conditions. The systems support interfacing with physical devices and sensors, enabling comprehensive testing of complete systems before deployment.Expand Specific Solutions
Major Players in Robot Simulation Software Market
The industrial robot simulation software market is experiencing rapid growth driven by increasing automation demands across manufacturing sectors. The competitive landscape reveals a mature technology stage with established players like Siemens AG, Rockwell Automation Technologies, and Mitsubishi Electric Corp. leading through comprehensive digital twin and automation solutions. Japanese manufacturers including OMRON Corp. and Kawasaki Heavy Industries leverage strong robotics heritage, while emerging Chinese companies like Jiangsu Huibo Robotics Technology and Shanghai Silan Technology are gaining traction with cost-effective alternatives. Research institutions such as Centre National de la Recherche Scientifique and Technische Universität Ilmenau contribute foundational innovations. The market shows high fragmentation with specialized players like Dürr Systems focusing on automotive applications, indicating diverse industry-specific requirements and substantial growth opportunities in simulation-driven robot testing methodologies.
Rockwell Automation Technologies, Inc.
Technical Solution: Rockwell Automation provides robot simulation capabilities through their Studio 5000 Logix Designer and FactoryTalk View software suite. Their approach focuses on integrated automation solutions where robot simulation is embedded within broader manufacturing system modeling. The platform offers real-time simulation of robot controllers using virtual hardware-in-the-loop testing capabilities. Their solution supports Allen-Bradley robot controllers and third-party systems through standardized communication protocols. The software enables engineers to test robot programs in virtual environments that mirror actual production conditions, including I/O simulation and network communication testing. Rockwell's simulation tools are particularly strong in discrete manufacturing applications where robots work alongside other automated equipment.
Strengths: Excellent integration with Rockwell automation ecosystem, strong real-time simulation capabilities, robust industrial communication support. Weaknesses: Limited support for non-Rockwell hardware, primarily focused on discrete manufacturing, less advanced 3D visualization compared to specialized simulation tools.
OMRON Corp.
Technical Solution: OMRON develops simulation software specifically for their industrial robot systems through the OMRON Sysmac Studio platform. Their simulation environment provides integrated robot programming and testing capabilities within a unified development environment. The software supports both articulated and SCARA robot configurations with accurate kinematic modeling and motion planning algorithms. OMRON's simulation tools include collision detection, reach analysis, and cycle time optimization features. The platform enables virtual commissioning of complete robotic cells including vision systems, safety devices, and peripheral equipment. Their solution emphasizes ease of use with intuitive programming interfaces and supports both offline programming and online monitoring of robot operations.
Strengths: User-friendly interface, integrated vision system simulation, strong support for collaborative robot applications. Weaknesses: Limited to OMRON robot ecosystem, fewer advanced simulation features compared to specialized software, smaller market presence in heavy industrial applications.
Core Technologies in Advanced Robot Simulation Platforms
Testing robotic software systems using perturbations in simulation environments
PatentActiveUS20230070517A1
Innovation
- A robotic system testing platform that simulates naturally occurring perturbations using a computer-executed simulation, generating perturbations based on user input and baseline data to test robotic systems in a controlled environment, allowing for the evaluation of their performance under various uncertainties and complexities.




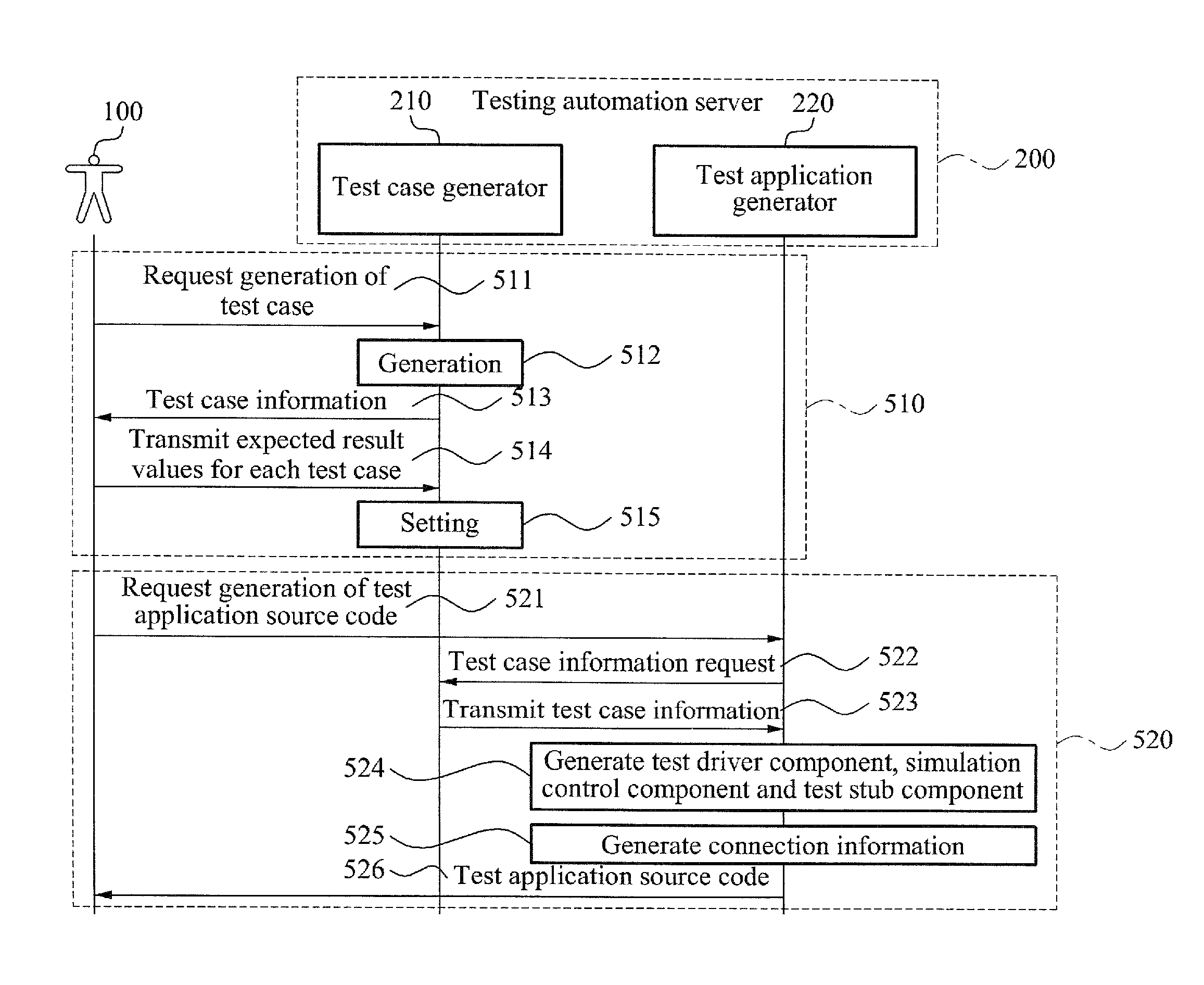
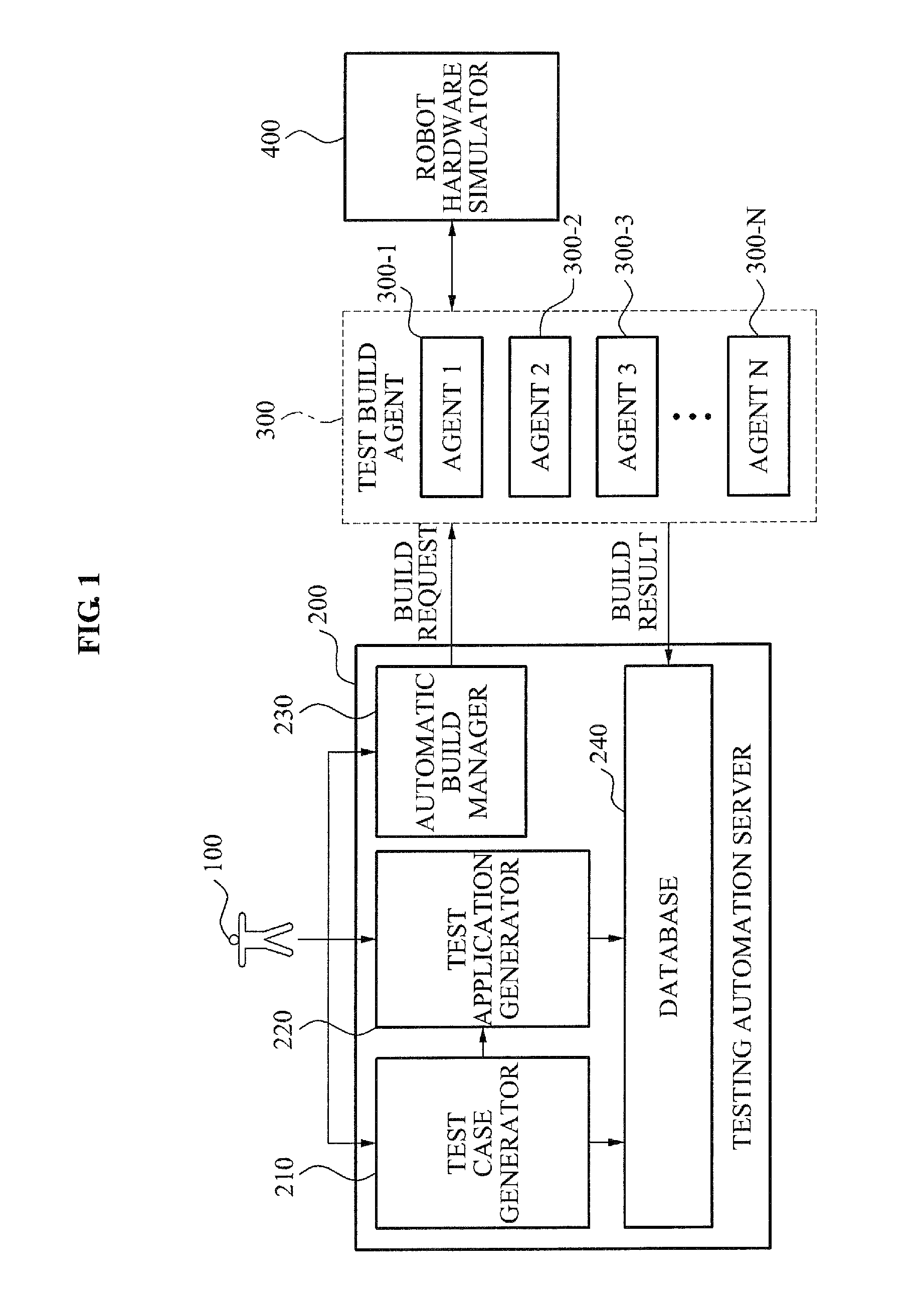
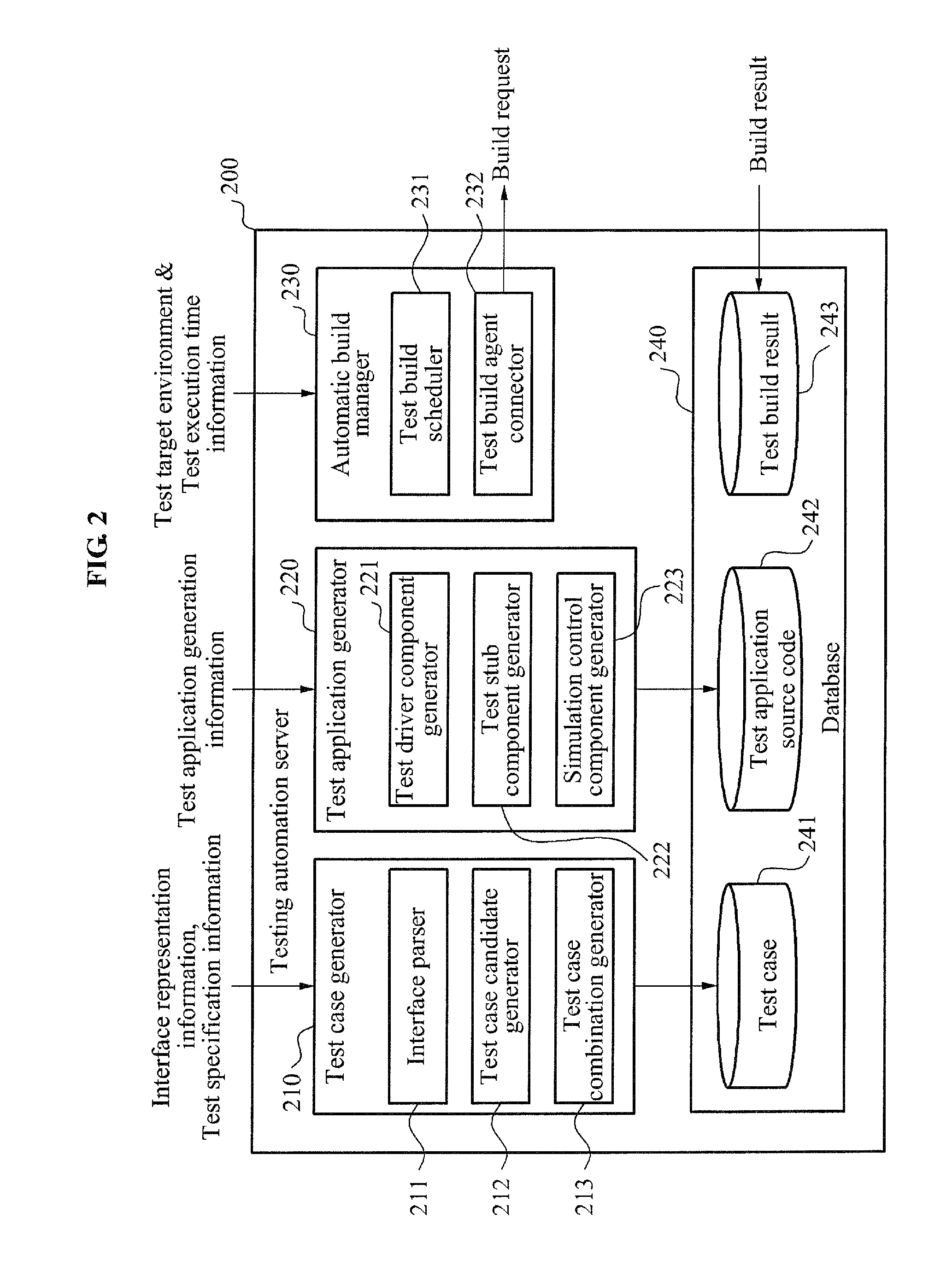
Simulation-based interface testing automation system and method for robot software components
PatentInactiveUS8601436B2
Innovation
- A simulation-based interface testing automation system and method that generates test cases and source code for robot software components using interface representation and test specification information, allowing for automated testing through a robot hardware simulator instead of actual hardware.

Safety Standards for Industrial Robot Testing
Safety standards for industrial robot testing represent a critical framework that governs the development, validation, and deployment of robotic systems across manufacturing environments. These standards establish comprehensive protocols that ensure both human safety and operational reliability throughout the robot lifecycle. The regulatory landscape encompasses multiple international and regional standards, with ISO 10218 series serving as the foundational framework for industrial robot safety, complemented by ISO/TS 15066 for collaborative robotics applications.
The implementation of safety standards directly influences simulation software requirements and testing methodologies. Simulation platforms must incorporate safety validation capabilities that align with established protocols, including risk assessment procedures, safety-rated monitoring systems, and emergency stop functionalities. These requirements mandate that testing software demonstrate compliance with safety integrity levels and provide comprehensive documentation trails for regulatory approval processes.
Functional safety standards, particularly IEC 61508 and its robotics-specific derivative ISO 13849, define the systematic approach for safety-related control systems. These standards establish performance levels and safety integrity requirements that simulation software must validate through rigorous testing scenarios. The software must demonstrate capability to model safety functions, including protective stops, speed and separation monitoring, and power and force limiting mechanisms.
Collaborative robotics introduces additional safety considerations through ISO/TS 15066, which defines four types of collaborative operations and their associated safety requirements. Simulation software must accurately model human-robot interaction scenarios, including contact forces, pressure limits, and biomechanical thresholds. This necessitates advanced physics engines capable of simulating compliant materials, force feedback systems, and dynamic collision detection algorithms.
Regional variations in safety standards create additional complexity for global manufacturers. European machinery directive 2006/42/EC, ANSI/RIA R15.06 in North America, and emerging standards in Asia-Pacific regions require simulation platforms to accommodate diverse regulatory frameworks. This regulatory diversity demands flexible testing environments that can adapt validation procedures to specific jurisdictional requirements while maintaining consistent safety performance metrics.
The evolution toward Industry 4.0 and smart manufacturing introduces new safety challenges related to cybersecurity, data integrity, and autonomous decision-making systems. Emerging standards address these concerns through frameworks that integrate traditional functional safety with cybersecurity protocols, requiring simulation software to validate both physical and digital safety mechanisms within interconnected manufacturing ecosystems.
The implementation of safety standards directly influences simulation software requirements and testing methodologies. Simulation platforms must incorporate safety validation capabilities that align with established protocols, including risk assessment procedures, safety-rated monitoring systems, and emergency stop functionalities. These requirements mandate that testing software demonstrate compliance with safety integrity levels and provide comprehensive documentation trails for regulatory approval processes.
Functional safety standards, particularly IEC 61508 and its robotics-specific derivative ISO 13849, define the systematic approach for safety-related control systems. These standards establish performance levels and safety integrity requirements that simulation software must validate through rigorous testing scenarios. The software must demonstrate capability to model safety functions, including protective stops, speed and separation monitoring, and power and force limiting mechanisms.
Collaborative robotics introduces additional safety considerations through ISO/TS 15066, which defines four types of collaborative operations and their associated safety requirements. Simulation software must accurately model human-robot interaction scenarios, including contact forces, pressure limits, and biomechanical thresholds. This necessitates advanced physics engines capable of simulating compliant materials, force feedback systems, and dynamic collision detection algorithms.
Regional variations in safety standards create additional complexity for global manufacturers. European machinery directive 2006/42/EC, ANSI/RIA R15.06 in North America, and emerging standards in Asia-Pacific regions require simulation platforms to accommodate diverse regulatory frameworks. This regulatory diversity demands flexible testing environments that can adapt validation procedures to specific jurisdictional requirements while maintaining consistent safety performance metrics.
The evolution toward Industry 4.0 and smart manufacturing introduces new safety challenges related to cybersecurity, data integrity, and autonomous decision-making systems. Emerging standards address these concerns through frameworks that integrate traditional functional safety with cybersecurity protocols, requiring simulation software to validate both physical and digital safety mechanisms within interconnected manufacturing ecosystems.
Cost-Benefit Analysis of Simulation vs Physical Testing
The economic evaluation of simulation software versus physical testing for industrial robot validation reveals significant cost differentials across multiple dimensions. Initial capital expenditure for simulation platforms typically ranges from $50,000 to $200,000 for comprehensive software suites, while establishing physical testing facilities can require investments exceeding $500,000 when factoring in robotic hardware, safety systems, and specialized testing equipment.
Operational cost structures demonstrate marked variations between approaches. Simulation environments eliminate consumable materials, reduce energy consumption by approximately 70-80%, and minimize facility overhead requirements. Physical testing incurs ongoing expenses for maintenance, calibration, spare parts, and potential equipment damage during failure mode testing, with annual operational costs often reaching 15-20% of initial hardware investment.
Time-to-market considerations present compelling arguments for simulation adoption. Virtual testing environments enable parallel development workflows, reducing validation cycles from weeks to days. Complex scenario testing that might require extensive physical setup can be executed within hours in simulation environments. However, this acceleration must be balanced against the time investment required for accurate model development and validation.
Risk mitigation through simulation offers substantial financial benefits by preventing costly physical prototype failures. Destructive testing scenarios, collision detection, and extreme operating condition validation can be performed without hardware risk. Conservative estimates suggest simulation prevents 60-80% of potential physical testing failures, translating to significant cost avoidance.
The scalability factor strongly favors simulation approaches. Once developed, virtual test environments can accommodate multiple robot configurations, varied payloads, and diverse operational scenarios without proportional cost increases. Physical testing requires dedicated setup time and resources for each configuration change.
Return on investment analysis indicates simulation platforms typically achieve payback within 12-18 months for organizations conducting regular robot validation activities. The break-even point occurs when simulation prevents approximately 3-5 major physical testing failures or enables equivalent time savings in development cycles.
However, certain validation requirements mandate physical verification, particularly for safety-critical applications, regulatory compliance, and final system integration testing. Optimal cost-benefit realization emerges from hybrid approaches that leverage simulation for initial development phases while reserving physical testing for final validation and certification requirements.
Operational cost structures demonstrate marked variations between approaches. Simulation environments eliminate consumable materials, reduce energy consumption by approximately 70-80%, and minimize facility overhead requirements. Physical testing incurs ongoing expenses for maintenance, calibration, spare parts, and potential equipment damage during failure mode testing, with annual operational costs often reaching 15-20% of initial hardware investment.
Time-to-market considerations present compelling arguments for simulation adoption. Virtual testing environments enable parallel development workflows, reducing validation cycles from weeks to days. Complex scenario testing that might require extensive physical setup can be executed within hours in simulation environments. However, this acceleration must be balanced against the time investment required for accurate model development and validation.
Risk mitigation through simulation offers substantial financial benefits by preventing costly physical prototype failures. Destructive testing scenarios, collision detection, and extreme operating condition validation can be performed without hardware risk. Conservative estimates suggest simulation prevents 60-80% of potential physical testing failures, translating to significant cost avoidance.
The scalability factor strongly favors simulation approaches. Once developed, virtual test environments can accommodate multiple robot configurations, varied payloads, and diverse operational scenarios without proportional cost increases. Physical testing requires dedicated setup time and resources for each configuration change.
Return on investment analysis indicates simulation platforms typically achieve payback within 12-18 months for organizations conducting regular robot validation activities. The break-even point occurs when simulation prevents approximately 3-5 major physical testing failures or enables equivalent time savings in development cycles.
However, certain validation requirements mandate physical verification, particularly for safety-critical applications, regulatory compliance, and final system integration testing. Optimal cost-benefit realization emerges from hybrid approaches that leverage simulation for initial development phases while reserving physical testing for final validation and certification requirements.
Unlock deeper insights with Patsnap Eureka Quick Research — get a full tech report to explore trends and direct your research. Try now!
Generate Your Research Report Instantly with AI Agent
Supercharge your innovation with Patsnap Eureka AI Agent Platform!