

Comparing Telerobotics Sensors for High-Frequency Environments
MAY 18, 20269 MIN READ
Generate Your Research Report Instantly with AI Agent
Patsnap Eureka helps you evaluate technical feasibility & market potential.
Telerobotics Sensor Evolution and High-Frequency Goals
Telerobotics technology has undergone significant transformation since its inception in the 1940s when Raymond Goertz developed the first mechanical master-slave manipulator for handling radioactive materials. The evolution progressed through hydraulic systems in the 1950s, electric servo systems in the 1960s, and computer-controlled systems in the 1980s. Each advancement brought improved precision, reduced latency, and enhanced operator feedback capabilities.
The integration of advanced sensor technologies marked a pivotal shift in the 1990s, when force feedback sensors, vision systems, and tactile sensors began enabling more sophisticated remote operations. This period witnessed the emergence of bilateral teleoperation systems that could transmit both position and force information between master and slave devices, fundamentally changing the operator experience and system capabilities.
Modern telerobotics applications increasingly demand operation in high-frequency environments, where rapid response times and precise control are critical. These environments include microsurgery procedures requiring sub-millimeter precision, high-speed manufacturing processes, space exploration missions with extreme communication delays, and hazardous material handling in dynamic industrial settings. The frequency requirements in these applications often exceed traditional sensor capabilities, creating new technological challenges.
Contemporary sensor technologies face inherent limitations when operating at high frequencies. Traditional position sensors may exhibit bandwidth constraints, force sensors can introduce noise at higher sampling rates, and vision systems struggle with motion blur during rapid movements. These limitations directly impact system performance, potentially causing instability, reduced accuracy, or complete system failure in demanding applications.
The primary technical goals for high-frequency telerobotics sensors center on achieving sampling rates exceeding 1 kHz while maintaining signal integrity and minimizing latency. Force sensors must deliver high-resolution measurements with minimal drift, while position sensors require sub-micron accuracy across extended operational periods. Vision systems need to provide real-time processing capabilities with frame rates matching the control loop frequency.
Emerging objectives include developing sensor fusion algorithms that combine multiple sensor modalities to overcome individual sensor limitations. Advanced signal processing techniques aim to extract meaningful information from noisy high-frequency data streams while maintaining real-time performance requirements. Additionally, adaptive sensor systems that can dynamically adjust their operating parameters based on environmental conditions represent a crucial development direction for next-generation telerobotics applications.
The integration of advanced sensor technologies marked a pivotal shift in the 1990s, when force feedback sensors, vision systems, and tactile sensors began enabling more sophisticated remote operations. This period witnessed the emergence of bilateral teleoperation systems that could transmit both position and force information between master and slave devices, fundamentally changing the operator experience and system capabilities.
Modern telerobotics applications increasingly demand operation in high-frequency environments, where rapid response times and precise control are critical. These environments include microsurgery procedures requiring sub-millimeter precision, high-speed manufacturing processes, space exploration missions with extreme communication delays, and hazardous material handling in dynamic industrial settings. The frequency requirements in these applications often exceed traditional sensor capabilities, creating new technological challenges.
Contemporary sensor technologies face inherent limitations when operating at high frequencies. Traditional position sensors may exhibit bandwidth constraints, force sensors can introduce noise at higher sampling rates, and vision systems struggle with motion blur during rapid movements. These limitations directly impact system performance, potentially causing instability, reduced accuracy, or complete system failure in demanding applications.
The primary technical goals for high-frequency telerobotics sensors center on achieving sampling rates exceeding 1 kHz while maintaining signal integrity and minimizing latency. Force sensors must deliver high-resolution measurements with minimal drift, while position sensors require sub-micron accuracy across extended operational periods. Vision systems need to provide real-time processing capabilities with frame rates matching the control loop frequency.
Emerging objectives include developing sensor fusion algorithms that combine multiple sensor modalities to overcome individual sensor limitations. Advanced signal processing techniques aim to extract meaningful information from noisy high-frequency data streams while maintaining real-time performance requirements. Additionally, adaptive sensor systems that can dynamically adjust their operating parameters based on environmental conditions represent a crucial development direction for next-generation telerobotics applications.
Market Demand for High-Frequency Telerobotics Applications
The aerospace and defense sector represents the largest market segment for high-frequency telerobotics applications, driven by the critical need for precise remote operations in space exploration, satellite servicing, and military applications. Space agencies and defense contractors require telerobotics systems capable of operating in extreme environments where traditional communication delays and harsh conditions demand sensors with exceptional frequency response characteristics. The growing commercial space industry has further amplified this demand, with private companies developing autonomous spacecraft and robotic systems for orbital manufacturing and asteroid mining operations.
Industrial automation constitutes another significant market driver, particularly in manufacturing environments where high-speed robotic operations require real-time sensor feedback. Semiconductor fabrication, precision assembly, and quality control processes increasingly rely on telerobotics systems that can operate at frequencies exceeding traditional industrial standards. The push toward Industry 4.0 and smart manufacturing has created substantial demand for sensors capable of supporting high-bandwidth data transmission and ultra-low latency control loops.
The medical robotics sector shows rapidly expanding demand for high-frequency telerobotics applications, especially in minimally invasive surgery and remote surgical procedures. Surgical robots require haptic feedback systems operating at frequencies above 1 kHz to provide surgeons with realistic tactile sensations during remote operations. The recent acceleration in telemedicine adoption has intensified the need for advanced sensor technologies that can support real-time surgical interventions across geographic distances.
Nuclear and hazardous environment applications represent a specialized but critical market segment where high-frequency telerobotics sensors are essential for safety and operational efficiency. Nuclear facility maintenance, deep-sea exploration, and chemical processing operations require robust sensor systems capable of maintaining high-frequency performance while withstanding extreme radiation, pressure, and temperature conditions. The decommissioning of aging nuclear facilities worldwide has created sustained demand for advanced telerobotics solutions.
Emerging applications in autonomous vehicles and smart infrastructure are creating new market opportunities for high-frequency telerobotics sensors. Vehicle-to-everything communication systems and remote vehicle operation capabilities require sensor technologies that can process and transmit data at frequencies necessary for real-time decision-making in dynamic environments.
Industrial automation constitutes another significant market driver, particularly in manufacturing environments where high-speed robotic operations require real-time sensor feedback. Semiconductor fabrication, precision assembly, and quality control processes increasingly rely on telerobotics systems that can operate at frequencies exceeding traditional industrial standards. The push toward Industry 4.0 and smart manufacturing has created substantial demand for sensors capable of supporting high-bandwidth data transmission and ultra-low latency control loops.
The medical robotics sector shows rapidly expanding demand for high-frequency telerobotics applications, especially in minimally invasive surgery and remote surgical procedures. Surgical robots require haptic feedback systems operating at frequencies above 1 kHz to provide surgeons with realistic tactile sensations during remote operations. The recent acceleration in telemedicine adoption has intensified the need for advanced sensor technologies that can support real-time surgical interventions across geographic distances.
Nuclear and hazardous environment applications represent a specialized but critical market segment where high-frequency telerobotics sensors are essential for safety and operational efficiency. Nuclear facility maintenance, deep-sea exploration, and chemical processing operations require robust sensor systems capable of maintaining high-frequency performance while withstanding extreme radiation, pressure, and temperature conditions. The decommissioning of aging nuclear facilities worldwide has created sustained demand for advanced telerobotics solutions.
Emerging applications in autonomous vehicles and smart infrastructure are creating new market opportunities for high-frequency telerobotics sensors. Vehicle-to-everything communication systems and remote vehicle operation capabilities require sensor technologies that can process and transmit data at frequencies necessary for real-time decision-making in dynamic environments.
Current Sensor Limitations in High-Frequency Environments
Current telerobotics sensors face significant performance degradation when operating in high-frequency environments, primarily due to fundamental limitations in their sensing mechanisms and signal processing capabilities. Traditional force and tactile sensors, which rely on resistive or capacitive sensing elements, exhibit reduced sensitivity and accuracy as operational frequencies increase beyond their designed bandwidth. These sensors typically demonstrate optimal performance in quasi-static conditions but suffer from phase lag, signal attenuation, and increased noise interference when subjected to rapid dynamic changes.
Bandwidth limitations represent one of the most critical constraints affecting sensor performance in high-frequency applications. Most commercial force sensors operate effectively within frequency ranges of 100-1000 Hz, while advanced haptic feedback systems require response rates exceeding 1 kHz to maintain stability and prevent oscillations. This mismatch creates a fundamental bottleneck in telerobotics systems where real-time force feedback is essential for precise manipulation tasks.
Signal-to-noise ratio degradation becomes increasingly problematic as operational frequencies rise. High-frequency environments introduce electromagnetic interference, mechanical vibrations, and thermal noise that can overwhelm weak sensor signals. Conventional filtering techniques often prove inadequate, as aggressive low-pass filtering introduces unacceptable delays that compromise system responsiveness and stability.
Mechanical resonance effects pose another significant challenge, particularly for sensors with moving parts or flexible elements. When excitation frequencies approach the natural resonant frequencies of sensor components, amplified responses and distorted measurements occur. This phenomenon is especially pronounced in miniaturized sensors designed for surgical robotics or precision assembly applications, where size constraints limit the ability to implement effective damping mechanisms.
Temperature sensitivity and drift characteristics of existing sensors become more pronounced under high-frequency operation due to increased power dissipation and thermal cycling. Silicon-based piezoresistive sensors, commonly used in force sensing applications, exhibit significant temperature coefficients that can introduce measurement errors exceeding acceptable tolerances in demanding telerobotics applications.
Communication latency and data processing delays further compound these limitations. Current sensor interfaces often rely on analog-to-digital conversion processes and communication protocols that introduce additional delays, making it challenging to achieve the sub-millisecond response times required for stable high-frequency telerobotics control loops.
Bandwidth limitations represent one of the most critical constraints affecting sensor performance in high-frequency applications. Most commercial force sensors operate effectively within frequency ranges of 100-1000 Hz, while advanced haptic feedback systems require response rates exceeding 1 kHz to maintain stability and prevent oscillations. This mismatch creates a fundamental bottleneck in telerobotics systems where real-time force feedback is essential for precise manipulation tasks.
Signal-to-noise ratio degradation becomes increasingly problematic as operational frequencies rise. High-frequency environments introduce electromagnetic interference, mechanical vibrations, and thermal noise that can overwhelm weak sensor signals. Conventional filtering techniques often prove inadequate, as aggressive low-pass filtering introduces unacceptable delays that compromise system responsiveness and stability.
Mechanical resonance effects pose another significant challenge, particularly for sensors with moving parts or flexible elements. When excitation frequencies approach the natural resonant frequencies of sensor components, amplified responses and distorted measurements occur. This phenomenon is especially pronounced in miniaturized sensors designed for surgical robotics or precision assembly applications, where size constraints limit the ability to implement effective damping mechanisms.
Temperature sensitivity and drift characteristics of existing sensors become more pronounced under high-frequency operation due to increased power dissipation and thermal cycling. Silicon-based piezoresistive sensors, commonly used in force sensing applications, exhibit significant temperature coefficients that can introduce measurement errors exceeding acceptable tolerances in demanding telerobotics applications.
Communication latency and data processing delays further compound these limitations. Current sensor interfaces often rely on analog-to-digital conversion processes and communication protocols that introduce additional delays, making it challenging to achieve the sub-millisecond response times required for stable high-frequency telerobotics control loops.
Existing High-Frequency Sensor Solutions for Telerobotics
01 Force and tactile sensing systems for telerobotics
Advanced sensing systems that enable remote robotic systems to detect and measure force, pressure, and tactile feedback. These sensors provide haptic information to operators, allowing them to feel what the robot is touching or manipulating. The technology incorporates strain gauges, piezoelectric elements, and capacitive sensors to capture detailed tactile information and transmit it back to the operator interface for enhanced control precision.- Force and tactile feedback sensors for telerobotics: Advanced sensor systems that provide haptic feedback and force sensing capabilities in telerobotic applications. These sensors enable operators to feel and perceive the forces and tactile sensations experienced by remote robotic systems, improving manipulation precision and safety in remote operations.
- Vision and imaging sensors for remote robot control: Optical sensing technologies including cameras, depth sensors, and advanced imaging systems that provide visual feedback for telerobotic operations. These sensors enable real-time monitoring and precise control of remote robotic systems through enhanced visual perception and environmental awareness.
- Position and motion tracking sensors: Sensor systems designed to accurately track and measure the position, orientation, and movement of robotic components in telerobotic applications. These sensors provide essential feedback for precise control and coordination of remote robotic operations across various environments.
- Environmental and proximity sensing systems: Sensor technologies that detect and monitor environmental conditions and obstacles around telerobotic systems. These sensors provide critical safety and navigation information by detecting proximity to objects, measuring environmental parameters, and ensuring safe operation in remote or hazardous environments.
- Multi-modal sensor integration and data fusion: Advanced sensor integration systems that combine multiple sensing modalities to provide comprehensive feedback for telerobotic control. These systems process and fuse data from various sensor types to create enhanced situational awareness and improved control capabilities for remote robotic operations.
02 Vision and imaging sensor integration
Comprehensive visual sensing solutions that incorporate cameras, depth sensors, and image processing capabilities for telerobotic applications. These systems provide real-time visual feedback to operators, enabling precise navigation and manipulation in remote environments. The technology includes stereo vision systems, infrared imaging, and advanced image processing algorithms to enhance operator situational awareness.Expand Specific Solutions03 Position and motion sensing technologies
Sophisticated positioning systems that track and monitor the movement and orientation of telerobotic systems in three-dimensional space. These sensors utilize encoders, accelerometers, gyroscopes, and magnetic field sensors to provide accurate position feedback. The technology enables precise control of robotic movements and ensures accurate positioning during remote operations.Expand Specific Solutions04 Environmental and proximity detection sensors
Multi-modal sensing systems designed to detect environmental conditions and obstacles in the telerobotic operating environment. These sensors include ultrasonic, laser, and radar-based detection systems that provide collision avoidance and environmental mapping capabilities. The technology enables safe navigation and operation in complex or hazardous environments where direct human presence is not feasible.Expand Specific Solutions05 Wireless sensor communication and data transmission
Advanced communication systems that enable reliable transmission of sensor data between telerobotic systems and operator control stations. These systems incorporate wireless protocols, signal processing, and data compression techniques to ensure real-time transmission of critical sensor information. The technology addresses latency issues and maintains data integrity across various communication channels and distances.Expand Specific Solutions
Leading Companies in Telerobotics and Sensor Manufacturing
The telerobotics sensor market for high-frequency environments is experiencing rapid growth driven by increasing automation demands across industrial, aerospace, and defense sectors. The industry is in an expansion phase with significant technological advancement occurring across multiple sensor modalities including proximity detection, positioning systems, and environmental monitoring. Market leaders like Robert Bosch GmbH and Siemens AG leverage decades of industrial automation expertise to deliver mature sensor solutions, while specialized companies such as Balluff Inc. and Cedes AG focus on precision positioning and safety-critical applications. Technology maturity varies significantly, with established players like Watlow Electric Manufacturing and IFM Electronic offering proven industrial-grade sensors, whereas emerging companies like ZaiNar Inc. and VueReal Inc. are pioneering next-generation positioning and display technologies. The competitive landscape includes both traditional sensor manufacturers and innovative startups, indicating a dynamic market with opportunities for disruptive technologies in high-frequency telerobotics applications.
Robert Bosch GmbH
Technical Solution: Bosch develops advanced MEMS-based inertial measurement units (IMUs) and multi-sensor fusion systems specifically designed for high-frequency telerobotics applications. Their sensor solutions integrate accelerometers, gyroscopes, and magnetometers with sampling rates up to 8kHz, enabling precise motion tracking and feedback control in demanding robotic environments. The company's proprietary sensor fusion algorithms combine multiple sensor inputs to provide robust position and orientation data even in electromagnetically noisy industrial settings. Their automotive-grade sensors are adapted for telerobotic systems requiring high reliability and low latency response times under 1ms.
Strengths: Proven automotive-grade reliability, advanced MEMS technology, excellent noise immunity. Weaknesses: Higher cost compared to consumer-grade alternatives, complex integration requirements.
Siemens AG
Technical Solution: Siemens offers comprehensive sensor solutions for industrial telerobotics through their SITRANS and SIMATIC sensor portfolios. Their approach focuses on distributed sensor networks with real-time Ethernet communication protocols like PROFINET, achieving cycle times as low as 250 microseconds for critical control loops. The company integrates pressure, temperature, flow, and position sensors with advanced signal processing capabilities to handle high-frequency data acquisition up to 100kHz sampling rates. Their Industrial Edge computing platform enables local sensor data preprocessing to reduce communication latency in telerobotic control systems.
Strengths: Industrial-grade robustness, excellent system integration capabilities, comprehensive automation ecosystem. Weaknesses: Proprietary protocols may limit interoperability, significant initial investment required.
Critical Patents in High-Frequency Telerobotics Sensing
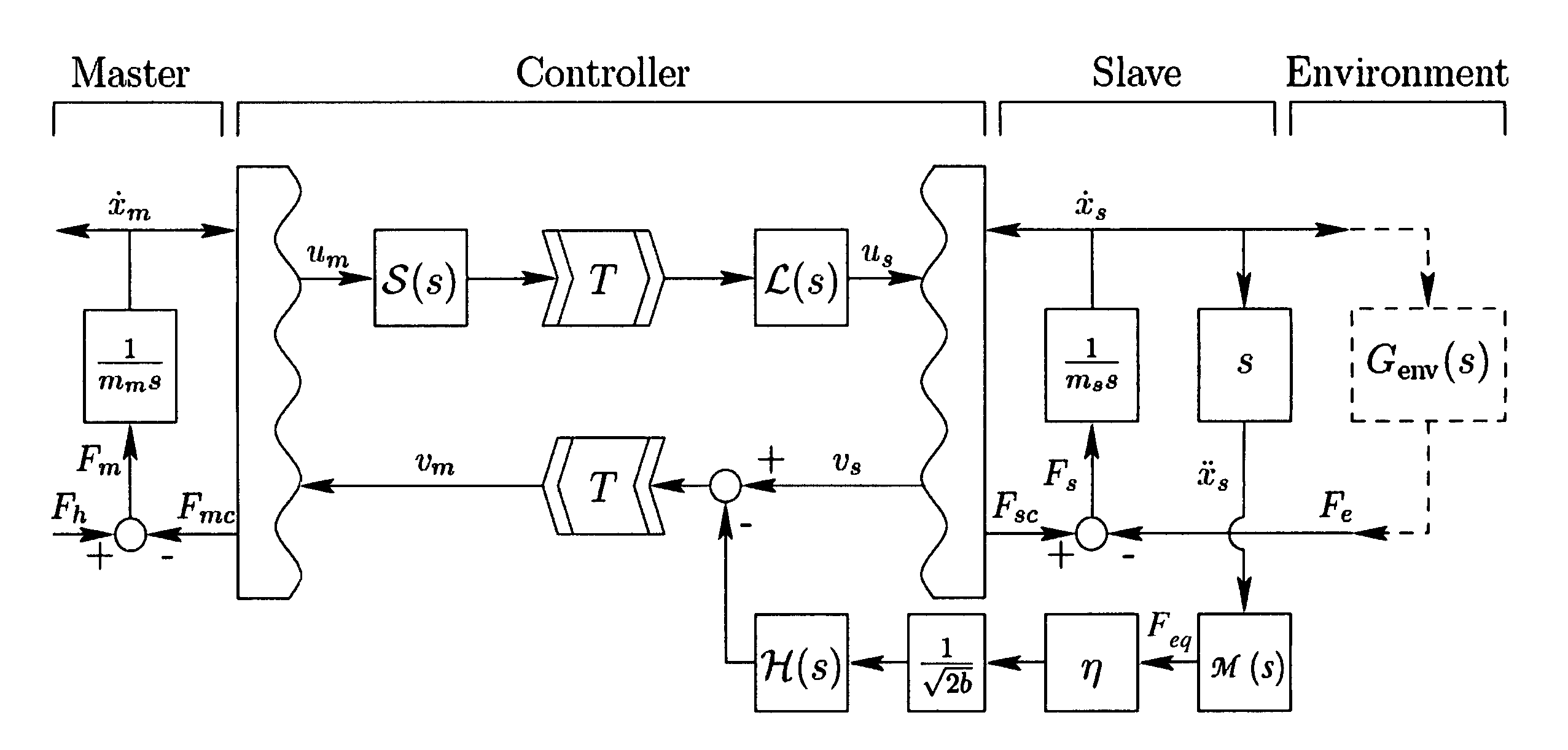
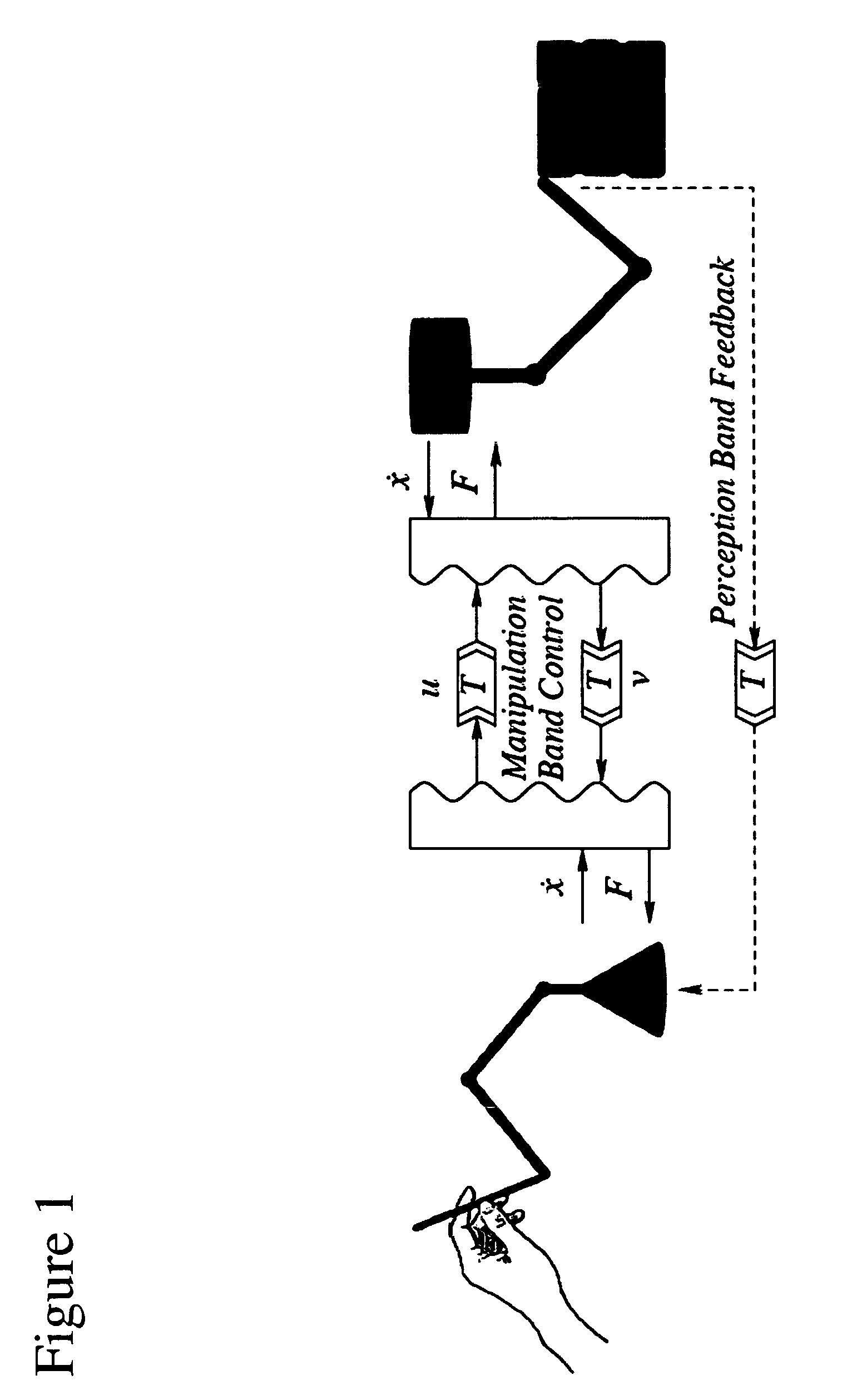
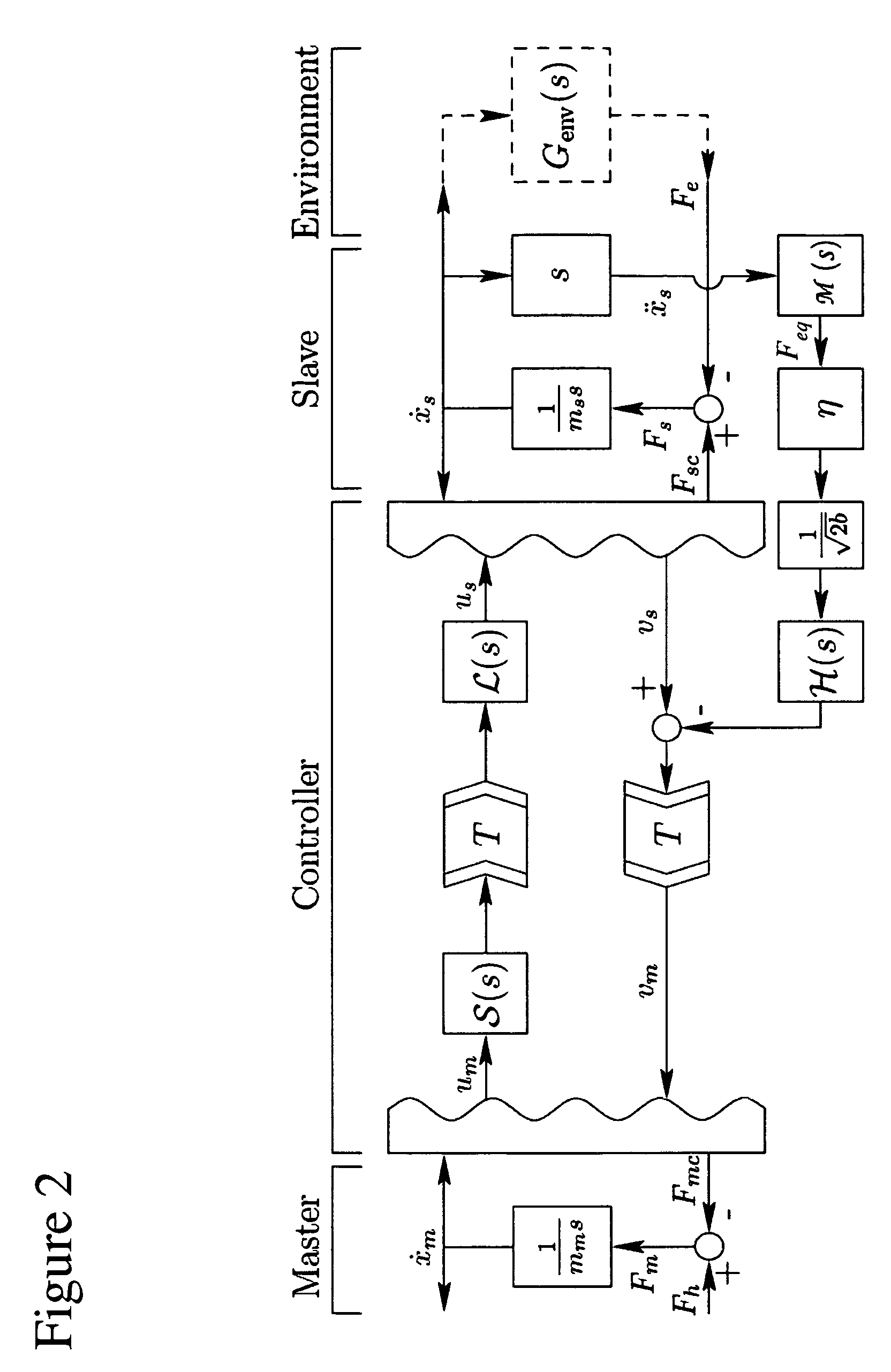
High frequency feedback in telerobotics
PatentInactiveUS8190292B2
Innovation
- The implementation of an augmented wave controller that combines low frequency position or velocity information with high frequency force or acceleration information, using wave filters to shape and cancel reflections, and incorporating gyroscopic forces to maintain contact stability and provide unidirectional high frequency feedback.

Continuous sensor measurement in harsh environments
PatentInactiveUS20160266277A1
Innovation
- The development of passive inductor resonant circuit sensors using ferromagnetic materials with wire coils, which are tuned to respond to electromagnetic energy signals within a specific frequency band, allowing for reliable temperature and pressure measurements in harsh environments without the need for active electronics or fragile fiber optics.




Safety Standards for High-Frequency Telerobotics Systems
The development of comprehensive safety standards for high-frequency telerobotics systems represents a critical imperative as these technologies become increasingly prevalent in industrial, medical, and hazardous environment applications. Current regulatory frameworks primarily address conventional robotic systems operating at standard frequencies, leaving significant gaps in addressing the unique challenges posed by high-frequency operations where sensor data processing, actuator responses, and communication protocols operate at accelerated rates.
International standardization bodies including ISO, IEC, and IEEE have begun preliminary work on establishing safety protocols specifically tailored to high-frequency telerobotics environments. The ISO 10218 series, traditionally focused on industrial robot safety, is undergoing revision to incorporate high-frequency operational parameters, while IEC 61508 functional safety standards are being extended to address the rapid decision-making requirements inherent in high-frequency systems.
Key safety considerations for high-frequency telerobotics systems encompass multiple domains including electromagnetic compatibility, thermal management, and fail-safe mechanisms. High-frequency operations generate increased electromagnetic interference that can compromise sensor accuracy and communication integrity, necessitating stringent EMC standards. Additionally, the accelerated processing demands create thermal challenges requiring robust cooling systems and temperature monitoring protocols to prevent system failures that could compromise operator and environmental safety.
Emerging safety standards emphasize the implementation of redundant sensor arrays and multi-layered safety architectures to ensure system reliability under high-frequency conditions. These standards mandate real-time monitoring of sensor performance degradation, automatic frequency scaling during anomalous conditions, and immediate system shutdown protocols when safety thresholds are exceeded. The standards also require comprehensive testing procedures that simulate extended high-frequency operations to validate long-term system stability and safety performance.
Future safety standard development will likely incorporate artificial intelligence-driven predictive safety mechanisms and adaptive safety protocols that can dynamically adjust to varying operational frequencies while maintaining consistent safety margins across all operational modes.
International standardization bodies including ISO, IEC, and IEEE have begun preliminary work on establishing safety protocols specifically tailored to high-frequency telerobotics environments. The ISO 10218 series, traditionally focused on industrial robot safety, is undergoing revision to incorporate high-frequency operational parameters, while IEC 61508 functional safety standards are being extended to address the rapid decision-making requirements inherent in high-frequency systems.
Key safety considerations for high-frequency telerobotics systems encompass multiple domains including electromagnetic compatibility, thermal management, and fail-safe mechanisms. High-frequency operations generate increased electromagnetic interference that can compromise sensor accuracy and communication integrity, necessitating stringent EMC standards. Additionally, the accelerated processing demands create thermal challenges requiring robust cooling systems and temperature monitoring protocols to prevent system failures that could compromise operator and environmental safety.
Emerging safety standards emphasize the implementation of redundant sensor arrays and multi-layered safety architectures to ensure system reliability under high-frequency conditions. These standards mandate real-time monitoring of sensor performance degradation, automatic frequency scaling during anomalous conditions, and immediate system shutdown protocols when safety thresholds are exceeded. The standards also require comprehensive testing procedures that simulate extended high-frequency operations to validate long-term system stability and safety performance.
Future safety standard development will likely incorporate artificial intelligence-driven predictive safety mechanisms and adaptive safety protocols that can dynamically adjust to varying operational frequencies while maintaining consistent safety margins across all operational modes.
Performance Benchmarking Methodologies for Sensor Comparison
Establishing robust performance benchmarking methodologies is critical for conducting meaningful comparisons of telerobotics sensors in high-frequency environments. The complexity of these operational conditions necessitates comprehensive evaluation frameworks that can accurately capture sensor performance across multiple dimensions while accounting for the unique challenges posed by rapid data acquisition and processing requirements.
The foundation of effective sensor benchmarking lies in developing standardized test protocols that ensure reproducibility and comparability across different sensor technologies. These protocols must define precise environmental parameters, including vibration frequencies, electromagnetic interference levels, temperature variations, and mechanical stress conditions that accurately simulate real-world telerobotic applications. Standardization enables consistent evaluation criteria and eliminates variables that could skew comparative results.
Quantitative performance metrics form the core of any benchmarking methodology. Key parameters include latency measurements under varying frequency loads, signal-to-noise ratios across different operational frequencies, bandwidth utilization efficiency, and data throughput capabilities. Additionally, accuracy degradation patterns under high-frequency conditions must be systematically measured, along with power consumption profiles and thermal performance characteristics during sustained high-frequency operations.
Dynamic testing scenarios represent another crucial component of comprehensive benchmarking. Static laboratory conditions often fail to capture the complex interactions between sensors and high-frequency environments. Therefore, benchmarking methodologies should incorporate real-time performance assessment under varying load conditions, including burst frequency events, sustained high-frequency operations, and transitional periods between different operational modes.
Statistical analysis frameworks must be integrated into benchmarking methodologies to ensure reliable interpretation of performance data. This includes establishing confidence intervals, conducting significance testing for performance differences, and implementing robust data validation procedures. Monte Carlo simulations and statistical modeling can help predict sensor performance under conditions that may be difficult or expensive to replicate in physical testing environments.
Cross-platform compatibility assessment represents an essential aspect of sensor benchmarking in telerobotic applications. Sensors must be evaluated not only for their standalone performance but also for their integration capabilities with various control systems, communication protocols, and data processing architectures commonly used in telerobotic platforms.
The foundation of effective sensor benchmarking lies in developing standardized test protocols that ensure reproducibility and comparability across different sensor technologies. These protocols must define precise environmental parameters, including vibration frequencies, electromagnetic interference levels, temperature variations, and mechanical stress conditions that accurately simulate real-world telerobotic applications. Standardization enables consistent evaluation criteria and eliminates variables that could skew comparative results.
Quantitative performance metrics form the core of any benchmarking methodology. Key parameters include latency measurements under varying frequency loads, signal-to-noise ratios across different operational frequencies, bandwidth utilization efficiency, and data throughput capabilities. Additionally, accuracy degradation patterns under high-frequency conditions must be systematically measured, along with power consumption profiles and thermal performance characteristics during sustained high-frequency operations.
Dynamic testing scenarios represent another crucial component of comprehensive benchmarking. Static laboratory conditions often fail to capture the complex interactions between sensors and high-frequency environments. Therefore, benchmarking methodologies should incorporate real-time performance assessment under varying load conditions, including burst frequency events, sustained high-frequency operations, and transitional periods between different operational modes.
Statistical analysis frameworks must be integrated into benchmarking methodologies to ensure reliable interpretation of performance data. This includes establishing confidence intervals, conducting significance testing for performance differences, and implementing robust data validation procedures. Monte Carlo simulations and statistical modeling can help predict sensor performance under conditions that may be difficult or expensive to replicate in physical testing environments.
Cross-platform compatibility assessment represents an essential aspect of sensor benchmarking in telerobotic applications. Sensors must be evaluated not only for their standalone performance but also for their integration capabilities with various control systems, communication protocols, and data processing architectures commonly used in telerobotic platforms.
Unlock deeper insights with Patsnap Eureka Quick Research — get a full tech report to explore trends and direct your research. Try now!
Generate Your Research Report Instantly with AI Agent
Supercharge your innovation with Patsnap Eureka AI Agent Platform!