

Telerobotics Task Efficiency vs Manual Remote Equipment: Candidate Study
MAY 18, 20269 MIN READ
Generate Your Research Report Instantly with AI Agent
Patsnap Eureka helps you evaluate technical feasibility & market potential.
Telerobotics Background and Efficiency Goals
Telerobotics represents a convergence of robotics, telecommunications, and human-machine interface technologies that enables operators to control robotic systems from remote locations. This field emerged from the necessity to perform tasks in environments that are hazardous, inaccessible, or impractical for direct human presence. The evolution of telerobotics has been driven by advances in sensor technology, communication networks, haptic feedback systems, and artificial intelligence, creating sophisticated platforms capable of executing complex operations across vast distances.
The historical development of telerobotics traces back to early remote manipulation systems used in nuclear facilities during the 1940s and 1950s. These primitive systems evolved through decades of technological advancement, incorporating improved control algorithms, enhanced sensory feedback, and more intuitive operator interfaces. The integration of internet protocols and high-speed communication networks in the 1990s marked a pivotal transformation, enabling global-scale remote operations and real-time control capabilities.
Contemporary telerobotics applications span diverse sectors including space exploration, deep-sea research, medical surgery, hazardous material handling, and industrial maintenance. Each application domain presents unique challenges regarding latency tolerance, precision requirements, environmental adaptability, and operational complexity. The technology has demonstrated particular value in scenarios where human safety is paramount or where specialized expertise must be deployed across geographical boundaries.
The primary efficiency goals driving current telerobotics development focus on minimizing task completion time while maximizing operational accuracy and safety. Key performance metrics include reduced latency in command transmission, enhanced situational awareness through multi-modal sensory feedback, and improved operator training efficiency. Organizations seek to achieve cost-effectiveness by reducing the need for on-site personnel deployment while maintaining or exceeding the quality standards of manual operations.
Advanced telerobotics systems aim to bridge the performance gap between remote and local operations through sophisticated control architectures, predictive algorithms, and adaptive automation features. The integration of machine learning capabilities enables systems to learn from operator behaviors and environmental conditions, progressively improving task execution efficiency and reducing cognitive load on human operators.
The historical development of telerobotics traces back to early remote manipulation systems used in nuclear facilities during the 1940s and 1950s. These primitive systems evolved through decades of technological advancement, incorporating improved control algorithms, enhanced sensory feedback, and more intuitive operator interfaces. The integration of internet protocols and high-speed communication networks in the 1990s marked a pivotal transformation, enabling global-scale remote operations and real-time control capabilities.
Contemporary telerobotics applications span diverse sectors including space exploration, deep-sea research, medical surgery, hazardous material handling, and industrial maintenance. Each application domain presents unique challenges regarding latency tolerance, precision requirements, environmental adaptability, and operational complexity. The technology has demonstrated particular value in scenarios where human safety is paramount or where specialized expertise must be deployed across geographical boundaries.
The primary efficiency goals driving current telerobotics development focus on minimizing task completion time while maximizing operational accuracy and safety. Key performance metrics include reduced latency in command transmission, enhanced situational awareness through multi-modal sensory feedback, and improved operator training efficiency. Organizations seek to achieve cost-effectiveness by reducing the need for on-site personnel deployment while maintaining or exceeding the quality standards of manual operations.
Advanced telerobotics systems aim to bridge the performance gap between remote and local operations through sophisticated control architectures, predictive algorithms, and adaptive automation features. The integration of machine learning capabilities enables systems to learn from operator behaviors and environmental conditions, progressively improving task execution efficiency and reducing cognitive load on human operators.
Market Demand for Remote Operation Solutions
The global market for remote operation solutions has experienced unprecedented growth driven by multiple converging factors that fundamentally reshape industrial operations across sectors. Digital transformation initiatives, accelerated by recent global events, have pushed organizations to prioritize remote capabilities as essential rather than optional components of their operational infrastructure. This shift represents a paradigm change from traditional on-site manual operations toward sophisticated teleoperated systems that enable precise control from distant locations.
Industrial sectors demonstrate varying levels of demand intensity for remote operation technologies. Manufacturing environments increasingly require remote solutions to maintain production continuity while ensuring worker safety in hazardous conditions. The energy sector, particularly oil and gas operations, shows substantial demand for telerobotics systems that can perform maintenance and inspection tasks in extreme environments where human presence poses significant risks. Mining operations similarly drive demand for remote equipment capable of operating in dangerous underground conditions or contaminated areas.
Healthcare applications represent a rapidly expanding market segment where telerobotics solutions enable surgical procedures, patient care, and medical equipment operation across geographical distances. The precision requirements and life-critical nature of healthcare applications create demand for highly sophisticated remote operation systems with minimal latency and maximum reliability. Space exploration and deep-sea operations constitute specialized but high-value market segments requiring advanced telerobotics capabilities for environments completely inaccessible to human operators.
Geographic distribution of market demand reveals concentrated activity in technologically advanced regions with strong industrial bases. North American and European markets lead adoption due to established automation infrastructure and regulatory frameworks supporting remote operation technologies. Asian markets, particularly in manufacturing-intensive economies, demonstrate accelerating demand growth as labor costs rise and safety regulations become more stringent.
The competitive landscape reflects diverse market needs through specialized solution providers targeting specific industry verticals. Enterprise customers increasingly seek integrated platforms that combine hardware, software, and communication systems rather than standalone components. This trend drives demand toward comprehensive remote operation ecosystems that can seamlessly integrate with existing industrial control systems and enterprise resource planning platforms.
Market maturation indicators suggest transition from early adoption phases toward mainstream deployment across multiple industries. Customer requirements have evolved beyond basic remote control capabilities toward sophisticated systems offering enhanced task efficiency, reduced operational costs, and improved safety outcomes compared to traditional manual remote equipment approaches.
Industrial sectors demonstrate varying levels of demand intensity for remote operation technologies. Manufacturing environments increasingly require remote solutions to maintain production continuity while ensuring worker safety in hazardous conditions. The energy sector, particularly oil and gas operations, shows substantial demand for telerobotics systems that can perform maintenance and inspection tasks in extreme environments where human presence poses significant risks. Mining operations similarly drive demand for remote equipment capable of operating in dangerous underground conditions or contaminated areas.
Healthcare applications represent a rapidly expanding market segment where telerobotics solutions enable surgical procedures, patient care, and medical equipment operation across geographical distances. The precision requirements and life-critical nature of healthcare applications create demand for highly sophisticated remote operation systems with minimal latency and maximum reliability. Space exploration and deep-sea operations constitute specialized but high-value market segments requiring advanced telerobotics capabilities for environments completely inaccessible to human operators.
Geographic distribution of market demand reveals concentrated activity in technologically advanced regions with strong industrial bases. North American and European markets lead adoption due to established automation infrastructure and regulatory frameworks supporting remote operation technologies. Asian markets, particularly in manufacturing-intensive economies, demonstrate accelerating demand growth as labor costs rise and safety regulations become more stringent.
The competitive landscape reflects diverse market needs through specialized solution providers targeting specific industry verticals. Enterprise customers increasingly seek integrated platforms that combine hardware, software, and communication systems rather than standalone components. This trend drives demand toward comprehensive remote operation ecosystems that can seamlessly integrate with existing industrial control systems and enterprise resource planning platforms.
Market maturation indicators suggest transition from early adoption phases toward mainstream deployment across multiple industries. Customer requirements have evolved beyond basic remote control capabilities toward sophisticated systems offering enhanced task efficiency, reduced operational costs, and improved safety outcomes compared to traditional manual remote equipment approaches.
Current State of Telerobotics vs Manual Control
The current landscape of telerobotics versus manual control systems presents a complex technological ecosystem with distinct performance characteristics and operational paradigms. Traditional manual remote equipment control relies on direct human operator intervention through conventional interfaces such as joysticks, control panels, and visual monitoring systems. These systems typically require operators to maintain constant attention and make real-time decisions based on limited sensory feedback, often resulting in operator fatigue and reduced precision over extended operational periods.
Contemporary telerobotics systems have evolved to incorporate advanced sensor fusion, haptic feedback mechanisms, and semi-autonomous control algorithms that significantly enhance operational capabilities. Modern telerobotic platforms integrate multiple camera systems, force sensors, and environmental monitoring devices to provide operators with comprehensive situational awareness. The integration of artificial intelligence and machine learning algorithms enables these systems to perform predictive analysis and assist operators in complex decision-making processes.
Current telerobotics implementations demonstrate superior performance in precision-critical applications, particularly in hazardous environments where human presence is impractical or dangerous. Nuclear facility maintenance, deep-sea operations, and space exploration missions have validated the effectiveness of advanced telerobotic systems over traditional manual control methods. These applications showcase reduced error rates, improved task completion times, and enhanced safety metrics compared to conventional remote operation approaches.
However, significant technological gaps persist in current telerobotic systems, particularly regarding latency management, bandwidth limitations, and operator training requirements. Network delays in remote operations can severely impact task efficiency, especially in applications requiring fine motor control or rapid response capabilities. Manual control systems, while less sophisticated, often provide more intuitive operation for experienced operators and require minimal infrastructure investment.
The technological maturity varies significantly across different application domains. Industrial manufacturing and medical robotics have achieved relatively advanced telerobotic capabilities, while construction and mining industries continue to rely heavily on traditional manual remote control systems. This disparity reflects both the complexity of operational requirements and the economic considerations associated with technology adoption in different sectors.
Emerging hybrid control architectures are beginning to bridge the gap between fully manual and fully autonomous telerobotic systems. These approaches combine human cognitive capabilities with robotic precision and endurance, creating synergistic operational models that leverage the strengths of both paradigms while mitigating their respective limitations.
Contemporary telerobotics systems have evolved to incorporate advanced sensor fusion, haptic feedback mechanisms, and semi-autonomous control algorithms that significantly enhance operational capabilities. Modern telerobotic platforms integrate multiple camera systems, force sensors, and environmental monitoring devices to provide operators with comprehensive situational awareness. The integration of artificial intelligence and machine learning algorithms enables these systems to perform predictive analysis and assist operators in complex decision-making processes.
Current telerobotics implementations demonstrate superior performance in precision-critical applications, particularly in hazardous environments where human presence is impractical or dangerous. Nuclear facility maintenance, deep-sea operations, and space exploration missions have validated the effectiveness of advanced telerobotic systems over traditional manual control methods. These applications showcase reduced error rates, improved task completion times, and enhanced safety metrics compared to conventional remote operation approaches.
However, significant technological gaps persist in current telerobotic systems, particularly regarding latency management, bandwidth limitations, and operator training requirements. Network delays in remote operations can severely impact task efficiency, especially in applications requiring fine motor control or rapid response capabilities. Manual control systems, while less sophisticated, often provide more intuitive operation for experienced operators and require minimal infrastructure investment.
The technological maturity varies significantly across different application domains. Industrial manufacturing and medical robotics have achieved relatively advanced telerobotic capabilities, while construction and mining industries continue to rely heavily on traditional manual remote control systems. This disparity reflects both the complexity of operational requirements and the economic considerations associated with technology adoption in different sectors.
Emerging hybrid control architectures are beginning to bridge the gap between fully manual and fully autonomous telerobotic systems. These approaches combine human cognitive capabilities with robotic precision and endurance, creating synergistic operational models that leverage the strengths of both paradigms while mitigating their respective limitations.
Existing Telerobotics Task Execution Solutions
01 Advanced control algorithms for telerobotics systems
Implementation of sophisticated control algorithms and methodologies to enhance the precision and responsiveness of telerobotic operations. These algorithms focus on improving real-time control, reducing latency, and optimizing the coordination between human operators and robotic systems to achieve higher task completion rates and accuracy.- Autonomous control systems for telerobotics: Advanced autonomous control systems enable telerobotic devices to operate with minimal human intervention, improving task efficiency through automated decision-making processes. These systems incorporate artificial intelligence algorithms and machine learning capabilities to optimize robotic movements and task execution. The autonomous features reduce operator workload and enable more precise control in complex environments.
- Real-time communication and control interfaces: Enhanced communication protocols and user interfaces facilitate real-time control and feedback between operators and remote robotic systems. These interfaces provide intuitive control mechanisms that reduce learning curves and improve operational efficiency. Advanced haptic feedback systems and visual displays enable operators to perform complex tasks with greater precision and speed.
- Motion planning and trajectory optimization: Sophisticated motion planning algorithms optimize robotic trajectories to minimize execution time while maintaining accuracy and safety. These systems analyze environmental constraints and task requirements to generate efficient movement paths. Advanced trajectory optimization reduces energy consumption and wear on robotic components while maximizing task completion rates.
- Multi-robot coordination and task allocation: Coordinated multi-robot systems enable parallel task execution and improved overall efficiency through intelligent task distribution. These systems implement advanced scheduling algorithms to optimize resource allocation and minimize task completion time. Collaborative robotic networks can handle complex operations that would be inefficient or impossible for single robot systems.
- Adaptive learning and performance optimization: Machine learning algorithms enable telerobotic systems to adapt and improve performance over time through experience and data analysis. These systems continuously monitor task execution metrics and adjust operational parameters to enhance efficiency. Adaptive capabilities allow robots to learn from previous operations and optimize future task performance based on historical data and environmental feedback.
02 Human-machine interface optimization
Development of enhanced user interfaces and interaction methods that improve operator efficiency and reduce cognitive load during telerobotic operations. This includes haptic feedback systems, intuitive control mechanisms, and adaptive interface designs that allow operators to perform complex tasks more effectively and with reduced training time.Expand Specific Solutions03 Autonomous task planning and execution
Integration of artificial intelligence and machine learning techniques to enable telerobotic systems to autonomously plan and execute portions of complex tasks. This approach reduces the workload on human operators while maintaining high levels of task completion efficiency through intelligent decision-making and adaptive behavior.Expand Specific Solutions04 Communication and network optimization
Enhancement of communication protocols and network architectures to minimize delays and improve data transmission reliability in telerobotic systems. This includes methods for handling network latency, ensuring stable connections, and optimizing bandwidth usage to maintain consistent performance across various operating conditions.Expand Specific Solutions05 Multi-robot coordination and collaboration
Development of systems and methods for coordinating multiple telerobotic units to work together efficiently on complex tasks. This involves distributed control strategies, task allocation algorithms, and synchronization techniques that enable teams of robots to collaborate effectively while being managed by human operators.Expand Specific Solutions
Key Players in Telerobotics Industry
The telerobotics industry is experiencing rapid growth as it transitions from experimental research to commercial deployment, driven by increasing demand for remote operations across hazardous environments, healthcare, and manufacturing sectors. The market demonstrates significant expansion potential, particularly in nuclear, space, offshore energy, and medical applications where human presence poses risks or limitations. Technology maturity varies considerably among market participants, with established players like Honda Motor, Toyota Motor Corp., and iRobot Corp. leveraging decades of robotics expertise, while specialized companies such as Extend Robotics Ltd. and Shanghai Flexiv Robotics focus specifically on advanced teleoperation solutions. Research institutions including Carnegie Mellon University, Stanford University, and Tsinghua University continue advancing core technologies, while technology giants like Intel Corp., Samsung Electronics, and Apple Inc. contribute essential computing and sensing capabilities that enable low-latency, high-fidelity remote control systems essential for competitive task efficiency.
iRobot Corp.
Technical Solution: iRobot has developed advanced teleoperation systems for military and defense applications, including the PackBot and SUGV platforms that enable remote operation in hazardous environments. Their telerobotics solutions incorporate real-time video streaming, haptic feedback systems, and intuitive control interfaces that significantly reduce operator training time compared to manual remote equipment. The company's proprietary AWARE-2 robot intelligence system enhances autonomous navigation while maintaining human oversight capabilities. Their telerobotics platforms demonstrate measurably improved task completion rates in explosive ordnance disposal and reconnaissance missions, with reduced operator fatigue and enhanced safety margins compared to traditional manual remote control systems.
Strengths: Proven field deployment experience, robust haptic feedback integration, reduced operator training requirements. Weaknesses: Limited to specialized military applications, high system costs, dependency on reliable communication links.
Sony Group Corp.
Technical Solution: Sony has developed telerobotics solutions focusing on entertainment and professional applications, leveraging their expertise in imaging, sensors, and real-time communication technologies. Their approach integrates high-definition cameras, advanced image processing, and low-latency transmission systems to enable precise remote manipulation tasks. Sony's telerobotics platform utilizes their proprietary CMOS sensor technology and AI-enhanced image recognition to provide operators with superior visual feedback compared to conventional manual remote systems. The system incorporates predictive algorithms that anticipate operator intentions, resulting in smoother control and reduced task completion times. Their solution demonstrates particular effectiveness in broadcast production and remote content creation scenarios.
Strengths: Superior imaging technology, low-latency communication systems, strong entertainment industry integration. Weaknesses: Limited industrial robotics experience, focus primarily on media applications, higher cost for specialized components.
Core Technologies in Remote Control Systems
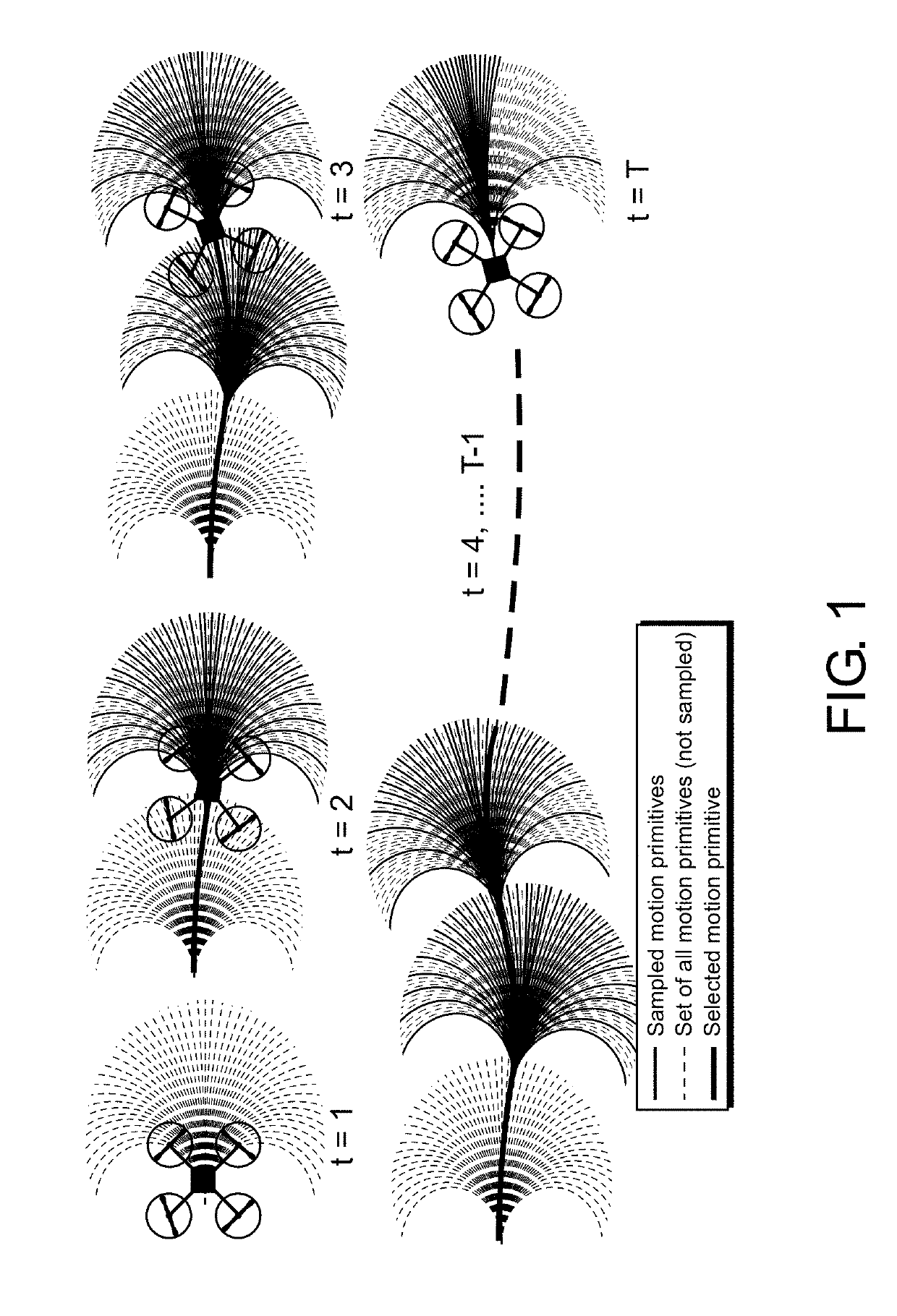
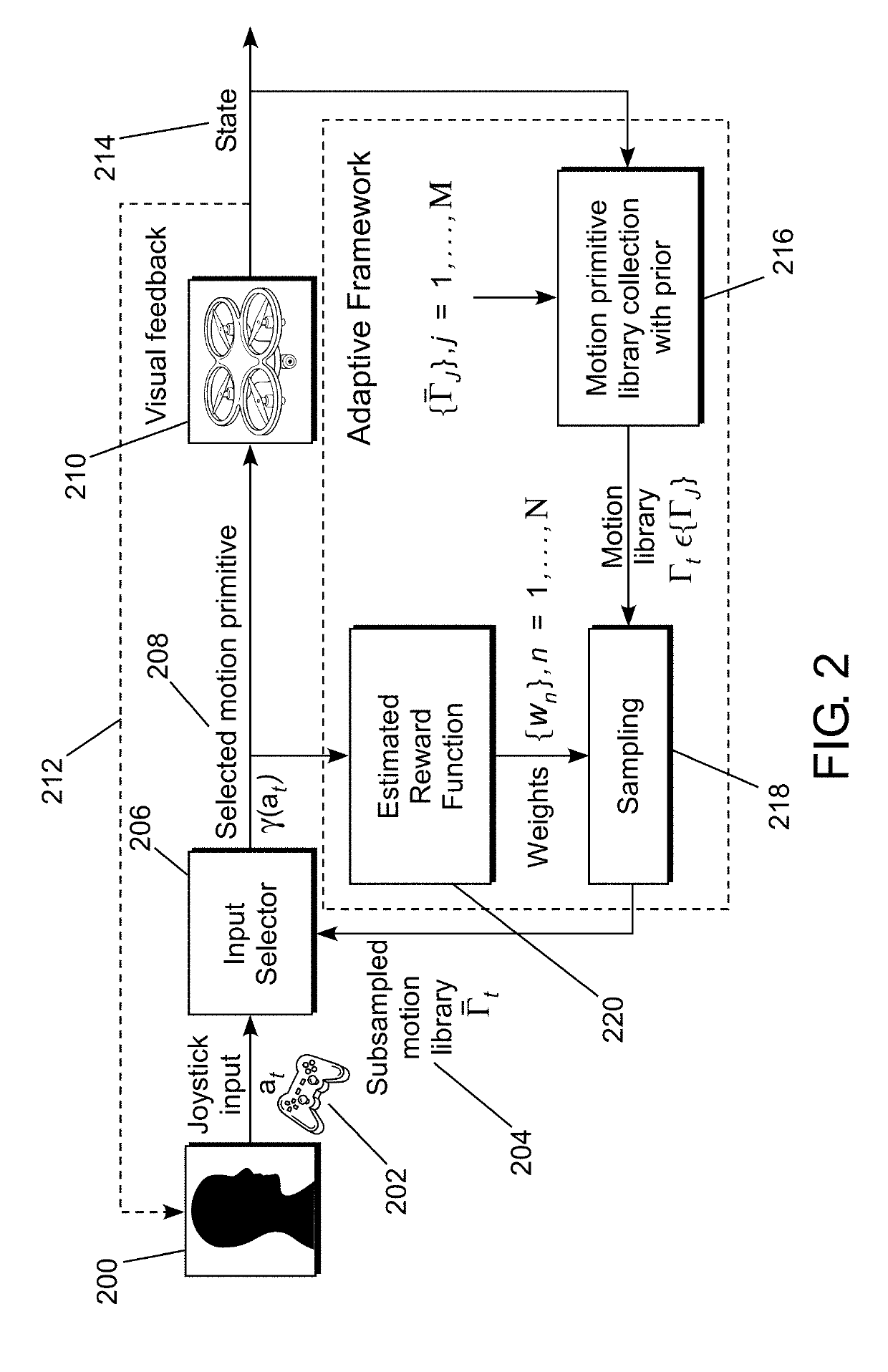
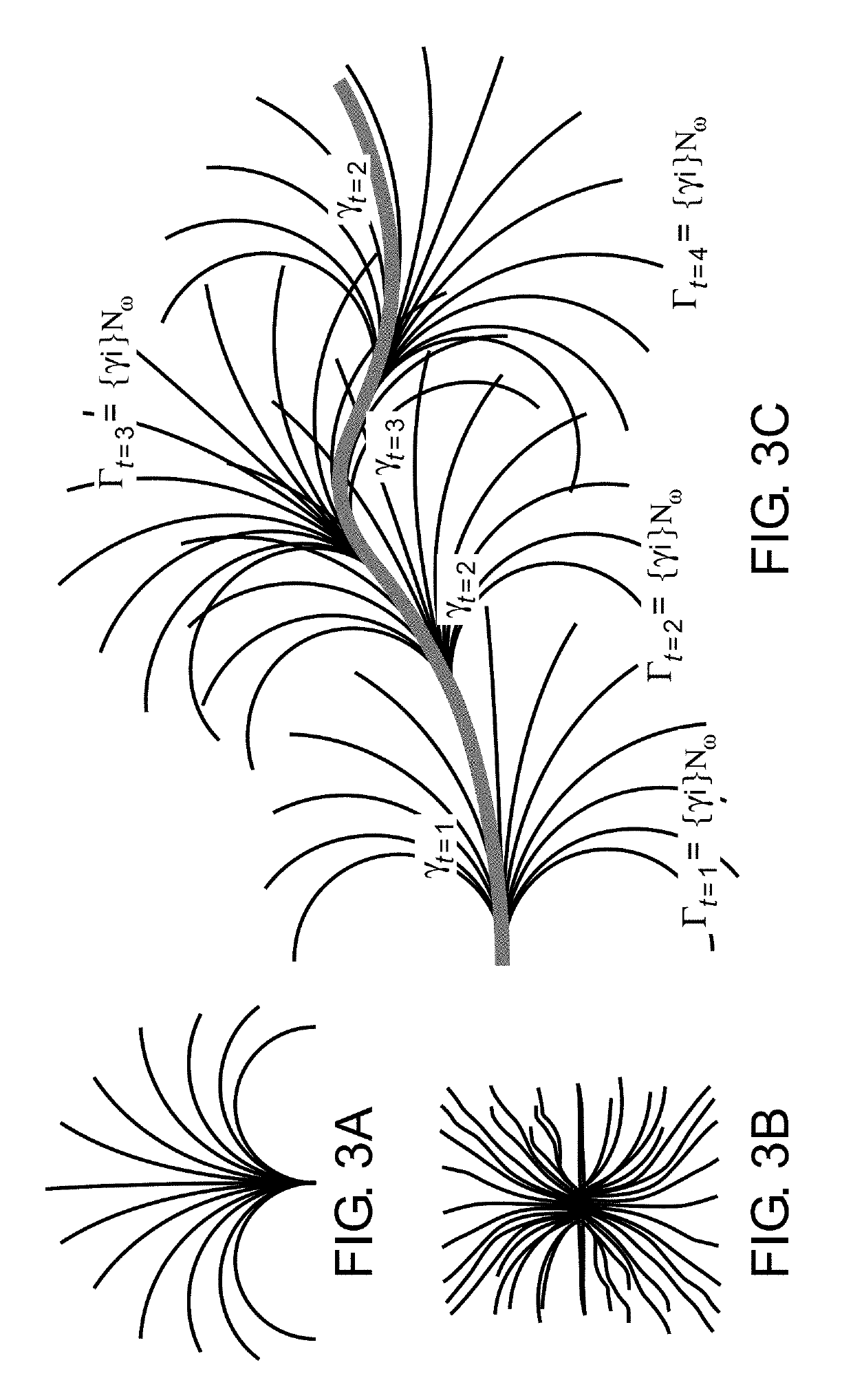
Efficient Teleoperation of Mobile Robots via Online Adaptation
PatentActiveUS20190271979A1
Innovation
- A framework for efficient, task-agnostic, user-independent adaptive teleoperation using motion primitives that predict operator intent and adapt available actions, reducing operator entropy and improving performance by leveraging onboard control systems, allowing navigation in unknown scenarios without prior knowledge.

System and method to reconstruct human motion for mobile robot teleoperation using shared control
PatentPendingUS20250108512A1
Innovation
- A system and method for mobile robot teleoperation using shared control, which includes acquiring human operator input, reconstructing kinematic states, and using model predictive control to follow the human operator's trajectory and intended goal, minimizing cognitive load by providing autonomous assistance.




Safety Standards for Remote Operations
Safety standards for remote operations represent a critical framework governing the deployment and execution of telerobotics systems across various industrial sectors. These standards encompass comprehensive protocols designed to mitigate risks associated with human-machine interaction in remote environments, establishing baseline requirements for operator safety, equipment reliability, and environmental protection.
International safety standards such as ISO 13849 for safety-related control systems and IEC 61508 for functional safety provide foundational guidelines for telerobotics applications. These frameworks mandate rigorous risk assessment procedures, requiring operators to identify potential hazards ranging from communication failures to mechanical malfunctions that could compromise mission integrity or personnel safety.
Operator certification requirements constitute another essential component of remote operations safety standards. Personnel must demonstrate proficiency in emergency response protocols, system diagnostics, and fail-safe procedures before obtaining authorization to operate telerobotics equipment. Training programs typically include simulation-based scenarios that replicate high-risk situations, ensuring operators can maintain control during critical system failures or unexpected environmental conditions.
Communication security protocols form a vital aspect of safety standards, particularly given the vulnerability of remote operations to cyber threats and signal interference. Standards mandate encrypted data transmission, redundant communication channels, and real-time monitoring systems to prevent unauthorized access or malicious interference that could compromise operational safety.
Environmental safety considerations address the interaction between telerobotics systems and their operational surroundings. Standards require comprehensive environmental impact assessments, particularly for operations in sensitive ecosystems or populated areas. These protocols ensure that remote equipment deployment does not pose risks to wildlife, infrastructure, or human populations in the operational vicinity.
Emergency response procedures represent the final critical element of safety standards, establishing clear protocols for system shutdown, personnel evacuation, and incident reporting. These procedures must account for the unique challenges of remote operations, including potential communication delays and limited on-site support capabilities.
International safety standards such as ISO 13849 for safety-related control systems and IEC 61508 for functional safety provide foundational guidelines for telerobotics applications. These frameworks mandate rigorous risk assessment procedures, requiring operators to identify potential hazards ranging from communication failures to mechanical malfunctions that could compromise mission integrity or personnel safety.
Operator certification requirements constitute another essential component of remote operations safety standards. Personnel must demonstrate proficiency in emergency response protocols, system diagnostics, and fail-safe procedures before obtaining authorization to operate telerobotics equipment. Training programs typically include simulation-based scenarios that replicate high-risk situations, ensuring operators can maintain control during critical system failures or unexpected environmental conditions.
Communication security protocols form a vital aspect of safety standards, particularly given the vulnerability of remote operations to cyber threats and signal interference. Standards mandate encrypted data transmission, redundant communication channels, and real-time monitoring systems to prevent unauthorized access or malicious interference that could compromise operational safety.
Environmental safety considerations address the interaction between telerobotics systems and their operational surroundings. Standards require comprehensive environmental impact assessments, particularly for operations in sensitive ecosystems or populated areas. These protocols ensure that remote equipment deployment does not pose risks to wildlife, infrastructure, or human populations in the operational vicinity.
Emergency response procedures represent the final critical element of safety standards, establishing clear protocols for system shutdown, personnel evacuation, and incident reporting. These procedures must account for the unique challenges of remote operations, including potential communication delays and limited on-site support capabilities.
Human Factors in Telerobotics Design
Human factors represent a critical dimension in telerobotics design that directly impacts task efficiency and operational effectiveness. The integration of human cognitive capabilities with robotic systems requires careful consideration of perceptual, motor, and cognitive limitations that influence operator performance during remote manipulation tasks.
Cognitive workload management emerges as a fundamental challenge in telerobotics applications. Operators must simultaneously process visual feedback, spatial information, and tactile cues while maintaining situational awareness of both local and remote environments. Research indicates that excessive cognitive demands can lead to performance degradation, increased error rates, and operator fatigue, particularly during extended operational periods.
Visual perception and display design significantly affect task execution efficiency in telerobotics systems. The absence of natural depth perception and limited field of view in camera-based systems creates substantial challenges for precise manipulation tasks. Stereoscopic displays and augmented reality interfaces have shown promise in improving spatial understanding, though they introduce additional complexity in system design and potential visual strain for operators.
Haptic feedback integration represents another crucial human factor consideration. The lack of tactile sensation in traditional telerobotics systems forces operators to rely heavily on visual cues for force estimation and contact detection. Advanced force feedback systems can partially address this limitation, but the fidelity and latency of haptic information remain significant technical challenges that affect overall task performance.
Motor control adaptation constitutes a key aspect of human-robot interaction in teleoperated systems. Operators must adapt their natural motor patterns to accommodate system delays, scaling factors, and control interface characteristics. The learning curve associated with this adaptation varies significantly among individuals and directly impacts comparative efficiency studies between telerobotics and manual remote equipment operation.
Situational awareness maintenance becomes increasingly complex in telerobotics environments where operators must monitor multiple information streams while maintaining focus on primary task objectives. The design of user interfaces, alarm systems, and information presentation methods critically influences operator decision-making capabilities and overall system performance during complex manipulation tasks.
Cognitive workload management emerges as a fundamental challenge in telerobotics applications. Operators must simultaneously process visual feedback, spatial information, and tactile cues while maintaining situational awareness of both local and remote environments. Research indicates that excessive cognitive demands can lead to performance degradation, increased error rates, and operator fatigue, particularly during extended operational periods.
Visual perception and display design significantly affect task execution efficiency in telerobotics systems. The absence of natural depth perception and limited field of view in camera-based systems creates substantial challenges for precise manipulation tasks. Stereoscopic displays and augmented reality interfaces have shown promise in improving spatial understanding, though they introduce additional complexity in system design and potential visual strain for operators.
Haptic feedback integration represents another crucial human factor consideration. The lack of tactile sensation in traditional telerobotics systems forces operators to rely heavily on visual cues for force estimation and contact detection. Advanced force feedback systems can partially address this limitation, but the fidelity and latency of haptic information remain significant technical challenges that affect overall task performance.
Motor control adaptation constitutes a key aspect of human-robot interaction in teleoperated systems. Operators must adapt their natural motor patterns to accommodate system delays, scaling factors, and control interface characteristics. The learning curve associated with this adaptation varies significantly among individuals and directly impacts comparative efficiency studies between telerobotics and manual remote equipment operation.
Situational awareness maintenance becomes increasingly complex in telerobotics environments where operators must monitor multiple information streams while maintaining focus on primary task objectives. The design of user interfaces, alarm systems, and information presentation methods critically influences operator decision-making capabilities and overall system performance during complex manipulation tasks.
Unlock deeper insights with Patsnap Eureka Quick Research — get a full tech report to explore trends and direct your research. Try now!
Generate Your Research Report Instantly with AI Agent
Supercharge your innovation with Patsnap Eureka AI Agent Platform!