

Enhancing System Architecture For Scalable Haptic Teleoperation
APR 20, 20269 MIN READ
Generate Your Research Report Instantly with AI Agent
PatSnap Eureka helps you evaluate technical feasibility & market potential.
Haptic Teleoperation System Architecture Background and Objectives
Haptic teleoperation represents a transformative paradigm in remote control systems, enabling operators to manipulate distant objects while receiving tactile feedback that simulates physical interaction. This technology bridges the gap between human dexterity and remote environments, creating immersive experiences that extend human capabilities across spatial and temporal boundaries. The evolution of haptic teleoperation has progressed from simple force feedback mechanisms to sophisticated multi-modal systems capable of transmitting complex tactile sensations.
The historical development of haptic teleoperation traces back to early master-slave manipulator systems developed in the 1940s for nuclear material handling. These primitive systems established the foundational concept of bilateral control, where operator actions are transmitted to a remote slave device while environmental forces are reflected back to the master interface. Over subsequent decades, technological advances in computing power, sensor miniaturization, and communication networks have enabled increasingly sophisticated implementations.
Contemporary haptic teleoperation systems face unprecedented demands for scalability, driven by emerging applications in telemedicine, space exploration, underwater operations, and industrial automation. Traditional point-to-point architectures struggle to accommodate multiple operators, diverse haptic devices, and distributed environments simultaneously. The scalability challenge encompasses not only the number of concurrent users but also the complexity of haptic rendering algorithms, real-time communication requirements, and system reliability across varying network conditions.
The primary objective of enhancing system architecture for scalable haptic teleoperation centers on developing robust frameworks that can dynamically adapt to changing operational requirements. This involves creating modular architectures that support heterogeneous haptic devices, implementing efficient data compression and transmission protocols, and establishing fault-tolerant mechanisms that maintain system stability under adverse conditions. The architecture must accommodate varying levels of haptic fidelity while optimizing computational resources and network bandwidth utilization.
Key technical objectives include minimizing end-to-end latency to preserve haptic transparency, ensuring consistent force feedback quality across different network conditions, and providing seamless integration capabilities for diverse haptic hardware platforms. The architecture should support both centralized and distributed processing models, enabling flexible deployment strategies that can scale from single-operator configurations to large-scale multi-user environments while maintaining the critical real-time performance characteristics essential for effective haptic interaction.
The historical development of haptic teleoperation traces back to early master-slave manipulator systems developed in the 1940s for nuclear material handling. These primitive systems established the foundational concept of bilateral control, where operator actions are transmitted to a remote slave device while environmental forces are reflected back to the master interface. Over subsequent decades, technological advances in computing power, sensor miniaturization, and communication networks have enabled increasingly sophisticated implementations.
Contemporary haptic teleoperation systems face unprecedented demands for scalability, driven by emerging applications in telemedicine, space exploration, underwater operations, and industrial automation. Traditional point-to-point architectures struggle to accommodate multiple operators, diverse haptic devices, and distributed environments simultaneously. The scalability challenge encompasses not only the number of concurrent users but also the complexity of haptic rendering algorithms, real-time communication requirements, and system reliability across varying network conditions.
The primary objective of enhancing system architecture for scalable haptic teleoperation centers on developing robust frameworks that can dynamically adapt to changing operational requirements. This involves creating modular architectures that support heterogeneous haptic devices, implementing efficient data compression and transmission protocols, and establishing fault-tolerant mechanisms that maintain system stability under adverse conditions. The architecture must accommodate varying levels of haptic fidelity while optimizing computational resources and network bandwidth utilization.
Key technical objectives include minimizing end-to-end latency to preserve haptic transparency, ensuring consistent force feedback quality across different network conditions, and providing seamless integration capabilities for diverse haptic hardware platforms. The architecture should support both centralized and distributed processing models, enabling flexible deployment strategies that can scale from single-operator configurations to large-scale multi-user environments while maintaining the critical real-time performance characteristics essential for effective haptic interaction.
Market Demand for Scalable Haptic Teleoperation Solutions
The global haptic technology market is experiencing unprecedented growth driven by the convergence of multiple technological trends and evolving user expectations across diverse industries. Remote operations, surgical procedures, industrial automation, and immersive entertainment applications are creating substantial demand for sophisticated haptic feedback systems that can operate reliably across distributed networks.
Healthcare represents one of the most promising sectors for scalable haptic teleoperation solutions. Telemedicine and remote surgery applications require precise force feedback mechanisms that enable surgeons to perform delicate procedures from distant locations. The growing shortage of specialized medical professionals in rural and underserved areas amplifies the need for haptic-enabled remote surgical systems that can maintain the tactile precision essential for successful medical interventions.
Industrial automation and manufacturing sectors are increasingly adopting teleoperation systems for hazardous environment operations, precision assembly tasks, and quality control processes. Mining, nuclear facility maintenance, underwater operations, and space exploration missions demand robust haptic interfaces that can transmit detailed tactile information across significant distances while maintaining real-time responsiveness and operational safety standards.
The entertainment and gaming industries are driving consumer-oriented demand for haptic technologies, particularly in virtual reality and augmented reality applications. As these platforms mature, users expect increasingly sophisticated tactile feedback that enhances immersion and interaction quality. This consumer market growth creates economies of scale that benefit enterprise applications through reduced component costs and accelerated technological development.
Educational institutions and training organizations represent another significant market segment seeking scalable haptic solutions. Professional training programs for medical procedures, engineering applications, and technical skills development benefit from haptic-enabled simulation systems that provide realistic tactile learning experiences without requiring physical presence at specialized facilities.
Current market constraints include latency limitations in network infrastructure, standardization challenges across different haptic devices, and scalability issues when supporting multiple simultaneous users. These technical barriers create opportunities for innovative system architectures that can address bandwidth optimization, distributed processing, and adaptive quality management.
The increasing deployment of edge computing infrastructure and improvements in network technologies, including advanced wireless protocols, are creating favorable conditions for expanded haptic teleoperation adoption. Organizations are actively seeking solutions that can leverage existing network investments while providing reliable haptic experiences across geographically distributed operations.
Healthcare represents one of the most promising sectors for scalable haptic teleoperation solutions. Telemedicine and remote surgery applications require precise force feedback mechanisms that enable surgeons to perform delicate procedures from distant locations. The growing shortage of specialized medical professionals in rural and underserved areas amplifies the need for haptic-enabled remote surgical systems that can maintain the tactile precision essential for successful medical interventions.
Industrial automation and manufacturing sectors are increasingly adopting teleoperation systems for hazardous environment operations, precision assembly tasks, and quality control processes. Mining, nuclear facility maintenance, underwater operations, and space exploration missions demand robust haptic interfaces that can transmit detailed tactile information across significant distances while maintaining real-time responsiveness and operational safety standards.
The entertainment and gaming industries are driving consumer-oriented demand for haptic technologies, particularly in virtual reality and augmented reality applications. As these platforms mature, users expect increasingly sophisticated tactile feedback that enhances immersion and interaction quality. This consumer market growth creates economies of scale that benefit enterprise applications through reduced component costs and accelerated technological development.
Educational institutions and training organizations represent another significant market segment seeking scalable haptic solutions. Professional training programs for medical procedures, engineering applications, and technical skills development benefit from haptic-enabled simulation systems that provide realistic tactile learning experiences without requiring physical presence at specialized facilities.
Current market constraints include latency limitations in network infrastructure, standardization challenges across different haptic devices, and scalability issues when supporting multiple simultaneous users. These technical barriers create opportunities for innovative system architectures that can address bandwidth optimization, distributed processing, and adaptive quality management.
The increasing deployment of edge computing infrastructure and improvements in network technologies, including advanced wireless protocols, are creating favorable conditions for expanded haptic teleoperation adoption. Organizations are actively seeking solutions that can leverage existing network investments while providing reliable haptic experiences across geographically distributed operations.
Current State and Scalability Challenges in Haptic Systems
Haptic teleoperation systems have evolved significantly over the past two decades, transitioning from laboratory prototypes to commercially viable solutions across multiple industries. Current implementations primarily focus on point-to-point connections with limited concurrent user support, typically accommodating fewer than ten simultaneous operators. The technology has found practical applications in surgical robotics, industrial automation, and remote maintenance operations, where precise force feedback and tactile sensation are critical for task performance.
The fundamental architecture of existing haptic teleoperation systems relies heavily on dedicated hardware configurations and proprietary communication protocols. Most commercial solutions employ centralized processing architectures where a single master controller manages all haptic interactions and force calculations. This approach, while effective for small-scale deployments, creates inherent bottlenecks that severely limit system expandability and concurrent user capacity.
Network latency remains one of the most significant technical barriers to scalable haptic teleoperation. Current systems require ultra-low latency communication, typically under 1 millisecond for stable force feedback, which restricts operational range and limits the feasibility of cloud-based scaling solutions. The stringent timing requirements force most implementations to rely on local area networks or dedicated communication channels, preventing widespread deployment across geographically distributed environments.
Computational resource allocation presents another critical scalability challenge. Real-time haptic rendering demands substantial processing power, with force feedback calculations requiring update rates of 1000Hz or higher to maintain stability and prevent oscillations. As the number of concurrent users increases, the computational load grows exponentially rather than linearly, creating resource contention issues that degrade system performance and user experience quality.
Synchronization complexity escalates dramatically in multi-user haptic environments. Current systems struggle to maintain coherent shared virtual environments when multiple operators interact with the same objects simultaneously. The challenge intensifies when considering distributed architectures where users may be located across different network segments with varying latency characteristics and bandwidth limitations.
Hardware standardization issues further complicate scalability efforts. The haptic device market remains fragmented with numerous proprietary interfaces and communication protocols. This fragmentation necessitates extensive compatibility layers and device-specific adaptations, increasing system complexity and maintenance overhead while limiting the ability to seamlessly integrate diverse haptic hardware configurations.
Bandwidth requirements for high-fidelity haptic data transmission create additional constraints on system scalability. Multi-degree-of-freedom haptic devices generate substantial data streams that must be transmitted with minimal compression to preserve tactile fidelity. As user counts increase, aggregate bandwidth demands can quickly exceed available network capacity, particularly in wireless or bandwidth-constrained environments.
Current quality of service mechanisms in haptic teleoperation systems lack the sophistication needed for large-scale deployments. Existing implementations typically employ simple priority-based scheduling that becomes inadequate when managing hundreds or thousands of concurrent haptic streams with varying criticality levels and performance requirements.
The fundamental architecture of existing haptic teleoperation systems relies heavily on dedicated hardware configurations and proprietary communication protocols. Most commercial solutions employ centralized processing architectures where a single master controller manages all haptic interactions and force calculations. This approach, while effective for small-scale deployments, creates inherent bottlenecks that severely limit system expandability and concurrent user capacity.
Network latency remains one of the most significant technical barriers to scalable haptic teleoperation. Current systems require ultra-low latency communication, typically under 1 millisecond for stable force feedback, which restricts operational range and limits the feasibility of cloud-based scaling solutions. The stringent timing requirements force most implementations to rely on local area networks or dedicated communication channels, preventing widespread deployment across geographically distributed environments.
Computational resource allocation presents another critical scalability challenge. Real-time haptic rendering demands substantial processing power, with force feedback calculations requiring update rates of 1000Hz or higher to maintain stability and prevent oscillations. As the number of concurrent users increases, the computational load grows exponentially rather than linearly, creating resource contention issues that degrade system performance and user experience quality.
Synchronization complexity escalates dramatically in multi-user haptic environments. Current systems struggle to maintain coherent shared virtual environments when multiple operators interact with the same objects simultaneously. The challenge intensifies when considering distributed architectures where users may be located across different network segments with varying latency characteristics and bandwidth limitations.
Hardware standardization issues further complicate scalability efforts. The haptic device market remains fragmented with numerous proprietary interfaces and communication protocols. This fragmentation necessitates extensive compatibility layers and device-specific adaptations, increasing system complexity and maintenance overhead while limiting the ability to seamlessly integrate diverse haptic hardware configurations.
Bandwidth requirements for high-fidelity haptic data transmission create additional constraints on system scalability. Multi-degree-of-freedom haptic devices generate substantial data streams that must be transmitted with minimal compression to preserve tactile fidelity. As user counts increase, aggregate bandwidth demands can quickly exceed available network capacity, particularly in wireless or bandwidth-constrained environments.
Current quality of service mechanisms in haptic teleoperation systems lack the sophistication needed for large-scale deployments. Existing implementations typically employ simple priority-based scheduling that becomes inadequate when managing hundreds or thousands of concurrent haptic streams with varying criticality levels and performance requirements.
Existing Scalable Architecture Solutions for Haptic Systems
01 Modular and distributed architecture for scalable haptic teleoperation
Scalable haptic teleoperation systems employ modular and distributed architectures that allow for flexible expansion and reconfiguration. These architectures separate functional components into independent modules that can communicate over networks, enabling the system to scale by adding or removing modules without redesigning the entire system. The distributed nature allows for load balancing and parallel processing, which improves system performance as complexity increases.- Modular and distributed architecture for scalable haptic teleoperation: Scalable haptic teleoperation systems employ modular and distributed architectures that allow for flexible expansion and integration of multiple components. These architectures separate functional modules such as haptic rendering, communication, and control into independent units that can be scaled horizontally. The modular design enables the system to accommodate varying numbers of operators, robots, or haptic devices without requiring complete system redesign. Distributed processing across multiple nodes reduces computational bottlenecks and improves overall system responsiveness.
- Network communication protocols and bandwidth optimization for scalability: Scalable haptic teleoperation systems implement advanced network communication protocols and bandwidth optimization techniques to support multiple simultaneous connections. These systems utilize adaptive data compression, prioritized packet transmission, and intelligent buffering strategies to maintain haptic fidelity while accommodating increased network traffic. The communication architecture is designed to handle variable latency and packet loss conditions across distributed networks, ensuring stable operation as the system scales to support additional users or devices.
- Multi-user and multi-robot coordination frameworks: Scalable architectures incorporate coordination frameworks that enable multiple operators to simultaneously control multiple robotic systems through haptic interfaces. These frameworks implement task allocation algorithms, conflict resolution mechanisms, and shared control strategies that maintain system stability as the number of participants increases. The coordination layer manages resource allocation, prioritizes control commands, and ensures safe interaction between multiple entities operating within the same workspace or across distributed environments.
- Cloud-based and edge computing integration for scalable processing: Modern scalable haptic teleoperation architectures leverage cloud computing and edge computing paradigms to distribute computational loads effectively. These systems offload computationally intensive tasks such as physics simulation, collision detection, and complex haptic rendering to cloud servers while maintaining time-critical operations at the edge. The hybrid computing approach allows the system to scale computational resources dynamically based on demand, supporting varying numbers of concurrent sessions without degrading haptic performance or increasing latency beyond acceptable thresholds.
- Adaptive control algorithms and real-time resource management: Scalable haptic teleoperation systems employ adaptive control algorithms and real-time resource management strategies that automatically adjust system parameters based on current load and performance metrics. These algorithms monitor system resources, network conditions, and haptic quality metrics to dynamically allocate processing power, adjust update rates, and modify control gains. The adaptive mechanisms ensure consistent user experience and system stability as operational demands fluctuate, enabling the architecture to scale efficiently across different deployment scenarios and user configurations.
02 Network communication protocols and bandwidth optimization
Achieving scalability in haptic teleoperation requires efficient network communication protocols that can handle increasing data loads while maintaining low latency. Advanced compression algorithms, adaptive sampling rates, and prioritization schemes are implemented to optimize bandwidth usage. These techniques ensure that haptic feedback remains responsive even as the number of connected devices or the complexity of transmitted data increases, making the system suitable for multi-user or multi-robot scenarios.Expand Specific Solutions03 Cloud-based and edge computing integration
Modern scalable haptic teleoperation architectures leverage cloud computing and edge computing paradigms to distribute computational loads effectively. Cloud resources provide virtually unlimited scalability for processing-intensive tasks, while edge computing reduces latency by performing time-critical haptic processing closer to the end devices. This hybrid approach allows systems to scale horizontally by adding computing resources as needed while maintaining the real-time performance requirements essential for haptic applications.Expand Specific Solutions04 Multi-robot and multi-user coordination frameworks
Scalable haptic teleoperation systems incorporate coordination frameworks that manage multiple robots and users simultaneously. These frameworks implement resource allocation algorithms, conflict resolution mechanisms, and synchronized control strategies that allow the system to scale from single-user single-robot configurations to complex multi-agent scenarios. The architecture supports dynamic addition and removal of participants while maintaining system stability and performance.Expand Specific Solutions05 Adaptive control algorithms and quality-of-service management
Scalability in haptic teleoperation is enhanced through adaptive control algorithms that dynamically adjust system parameters based on current load and performance metrics. Quality-of-service management mechanisms monitor system resources, network conditions, and user requirements to optimize the allocation of computational and communication resources. These adaptive approaches ensure that the system maintains acceptable performance levels as it scales, gracefully degrading non-critical functions when necessary to preserve essential haptic feedback quality.Expand Specific Solutions
Key Players in Haptic Teleoperation and System Architecture
The scalable haptic teleoperation field represents an emerging technology sector in its early-to-mid development stage, characterized by significant growth potential driven by increasing demand for remote manipulation capabilities across aerospace, medical robotics, and industrial automation markets. The competitive landscape demonstrates moderate technology maturity, with established players like Boeing, Intuitive Surgical, and Honda Motor leading system integration efforts, while specialized companies such as Exonetik focus on advanced haptic actuator development. Academic institutions including Worcester Polytechnic Institute, Technische Universität Darmstadt, and Zhejiang University contribute foundational research in haptic feedback algorithms and network architectures. Technology giants like Qualcomm and NXP provide essential semiconductor solutions for low-latency communication systems. The market shows fragmented competition between traditional aerospace/defense contractors, medical device manufacturers, and emerging haptic technology specialists, indicating ongoing technological convergence and substantial opportunities for innovation in scalable architectures that can support real-time force feedback across distributed networks.
Intuitive Surgical Operations, Inc.
Technical Solution: Intuitive Surgical has developed advanced haptic feedback systems integrated into their da Vinci surgical platform, utilizing force reflection algorithms and tactile sensing technologies to provide surgeons with enhanced dexterity during minimally invasive procedures. Their system architecture employs distributed processing units that handle real-time haptic rendering with latency under 1ms, ensuring stable teleoperation across network connections. The platform incorporates adaptive bandwidth management and predictive algorithms to maintain haptic fidelity even under varying network conditions, supporting scalable deployment across multiple surgical sites simultaneously.
Strengths: Market leader in surgical robotics with proven haptic teleoperation systems, extensive clinical validation. Weaknesses: High cost and complexity, primarily focused on surgical applications limiting broader scalability.
The Boeing Co.
Technical Solution: Boeing has implemented haptic teleoperation systems for aerospace applications, particularly in remote aircraft maintenance and space robotics operations. Their architecture employs redundant communication pathways and fault-tolerant haptic controllers that maintain operational stability even under challenging network conditions. The system features adaptive force scaling algorithms and predictive haptic rendering that compensates for communication delays up to 500ms, essential for satellite and space station operations. Boeing's scalable architecture supports multiple concurrent teleoperation sessions through distributed server farms and load balancing mechanisms.
Strengths: Extensive experience in mission-critical systems, robust fault-tolerance and reliability features suitable for aerospace applications. Weaknesses: High complexity and cost, primarily designed for specialized aerospace use cases rather than general commercial applications.
Core Innovations in Scalable Haptic System Design
Systems and methods for haptics-enabled teleoperation of vehicles and other devices
PatentActiveUS7885732B2
Innovation
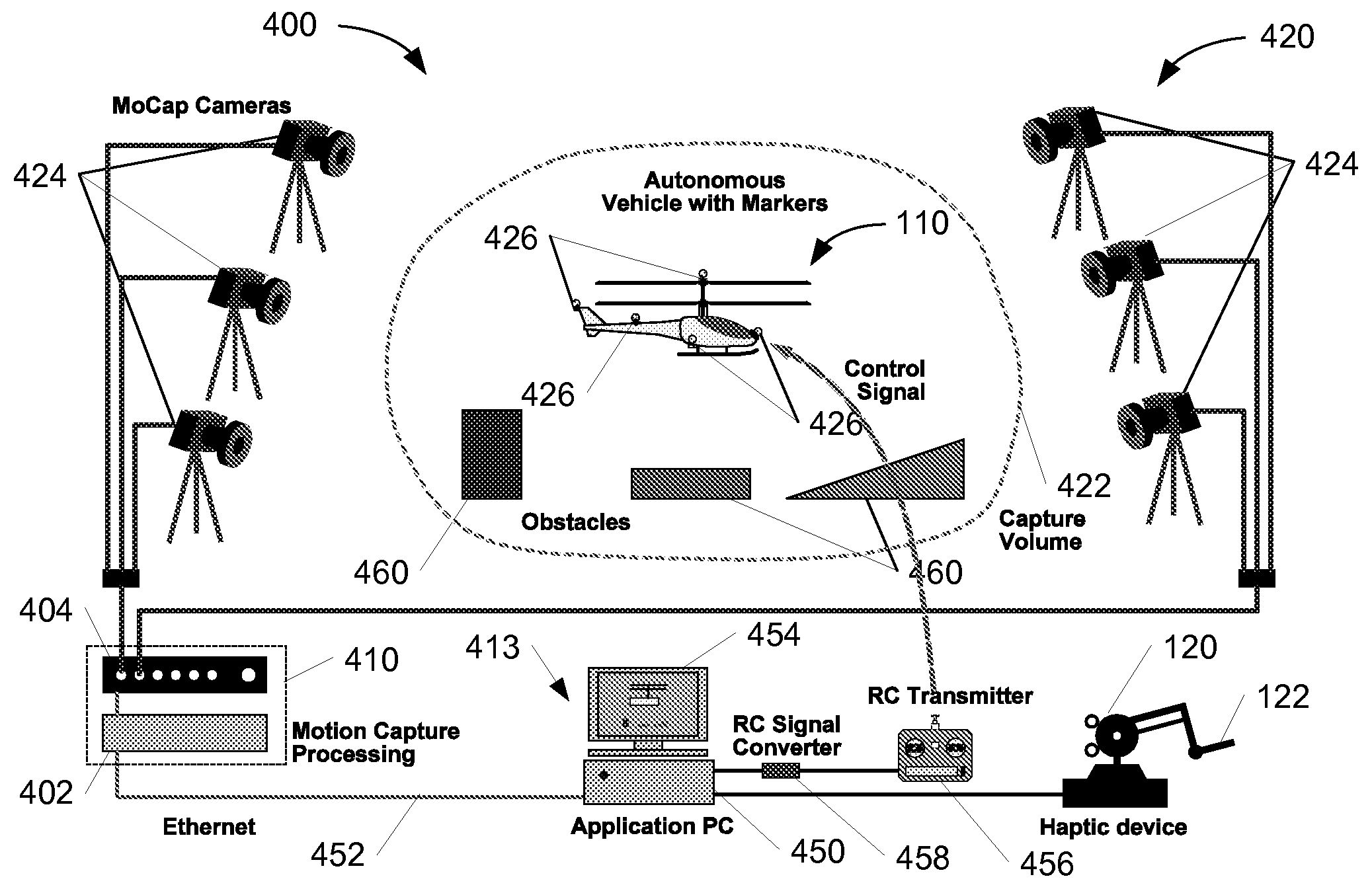
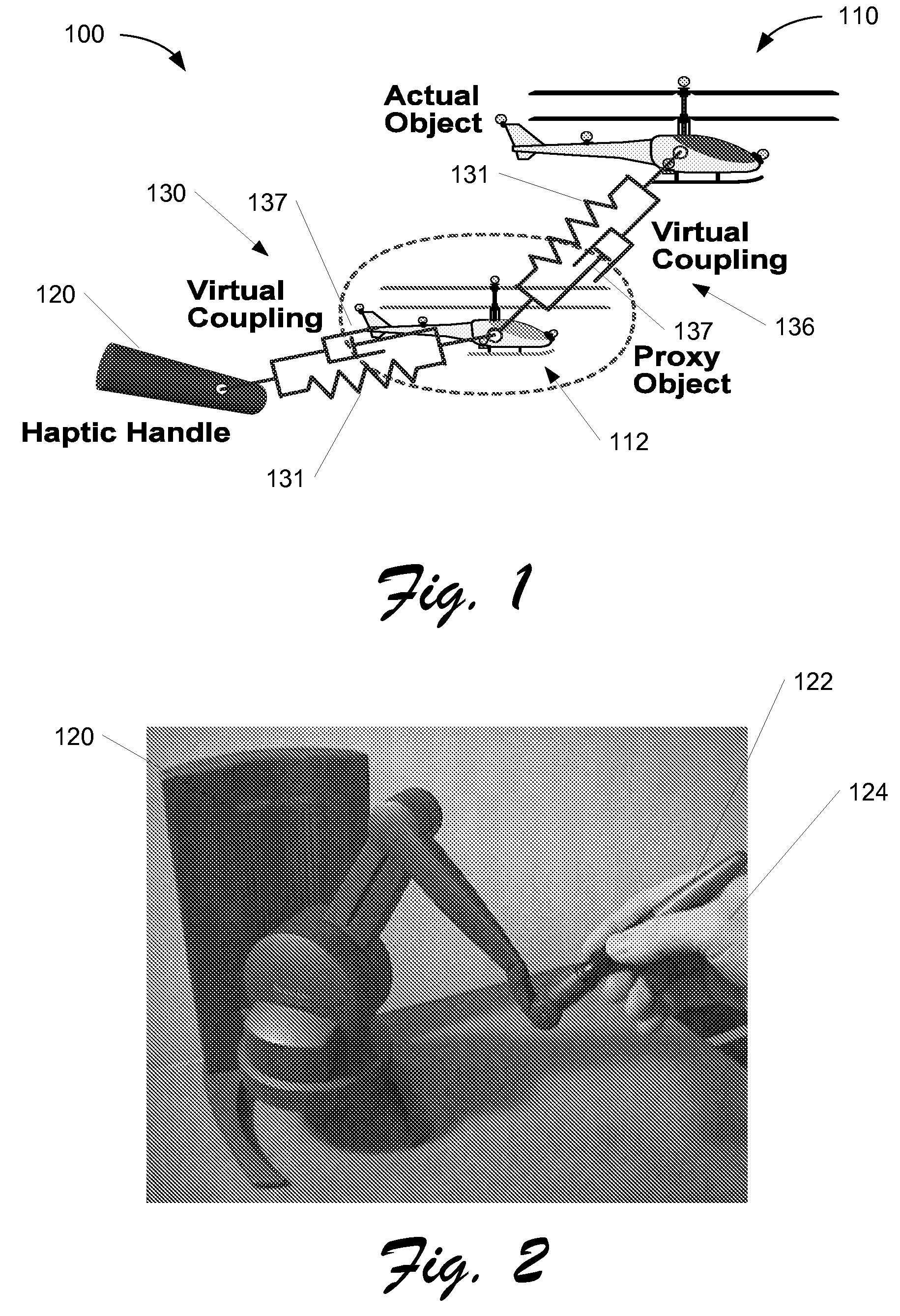
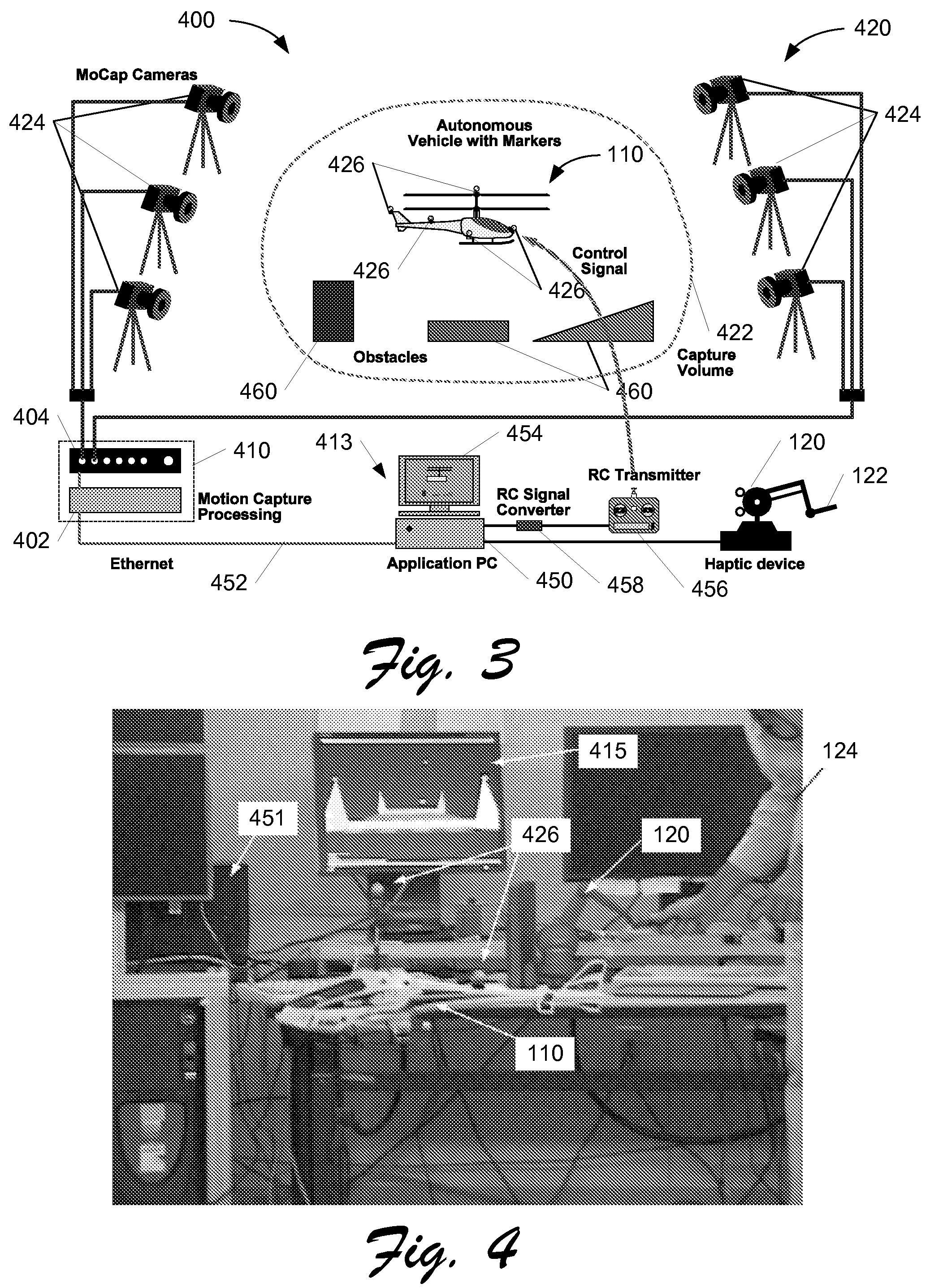
- A haptics-enabled teleoperation system that provides position and orientation control with haptic force feedback using a control component configured in a closed-loop feedback manner, incorporating a motion capture system for six degree-of-freedom position data and a haptic I/O device to simulate the physical sensations of the vehicle's motion, allowing operators to feel inertia, contact, and other forces.

Haptic system for robot teleoperation in confined spaces
PatentActiveUS12397442B2
Innovation
- A haptic feedback system using an upper-body haptic suit with vibrating modules on the front and back to provide tactile feedback corresponding to the robot's position and orientation, enhancing spatial awareness and navigation through vibrotactile cues.




Network Infrastructure Requirements for Haptic Scalability
Scalable haptic teleoperation systems demand robust network infrastructure capable of supporting ultra-low latency communication, high bandwidth throughput, and deterministic data delivery. The fundamental requirement centers on achieving end-to-end latency below 1 millisecond to maintain stable haptic feedback loops, as human perception becomes sensitive to delays exceeding this threshold. This necessitates dedicated network paths with minimal jitter and packet loss rates below 0.01%.
Bandwidth requirements vary significantly based on haptic fidelity and the number of concurrent users. Single-point haptic feedback typically requires 1-10 Kbps, while high-resolution multi-point tactile systems can demand up to 1 Mbps per user. For enterprise-scale deployments supporting hundreds of simultaneous operators, aggregate bandwidth requirements can reach several Gbps, necessitating fiber-optic backbone infrastructure with redundant pathways.
Quality of Service (QoS) mechanisms become critical for prioritizing haptic data streams over conventional network traffic. Implementation of traffic shaping, packet prioritization, and dedicated virtual LANs ensures consistent performance under varying network loads. Real-time protocols such as UDP with custom reliability layers often outperform TCP due to reduced overhead and elimination of retransmission delays that can destabilize haptic control loops.
Edge computing infrastructure plays a pivotal role in reducing communication latency by positioning processing resources closer to end users. Distributed edge nodes can handle local haptic processing, sensor fusion, and preliminary control calculations, transmitting only essential command and feedback data across longer network segments. This architecture reduces core network load while maintaining responsiveness.
Network redundancy and failover mechanisms are essential for mission-critical haptic applications. Dual-path routing, automatic failover protocols, and real-time network monitoring ensure continuous operation even during infrastructure failures. Software-defined networking (SDN) technologies enable dynamic path optimization and rapid reconfiguration based on current network conditions and performance requirements.
Bandwidth requirements vary significantly based on haptic fidelity and the number of concurrent users. Single-point haptic feedback typically requires 1-10 Kbps, while high-resolution multi-point tactile systems can demand up to 1 Mbps per user. For enterprise-scale deployments supporting hundreds of simultaneous operators, aggregate bandwidth requirements can reach several Gbps, necessitating fiber-optic backbone infrastructure with redundant pathways.
Quality of Service (QoS) mechanisms become critical for prioritizing haptic data streams over conventional network traffic. Implementation of traffic shaping, packet prioritization, and dedicated virtual LANs ensures consistent performance under varying network loads. Real-time protocols such as UDP with custom reliability layers often outperform TCP due to reduced overhead and elimination of retransmission delays that can destabilize haptic control loops.
Edge computing infrastructure plays a pivotal role in reducing communication latency by positioning processing resources closer to end users. Distributed edge nodes can handle local haptic processing, sensor fusion, and preliminary control calculations, transmitting only essential command and feedback data across longer network segments. This architecture reduces core network load while maintaining responsiveness.
Network redundancy and failover mechanisms are essential for mission-critical haptic applications. Dual-path routing, automatic failover protocols, and real-time network monitoring ensure continuous operation even during infrastructure failures. Software-defined networking (SDN) technologies enable dynamic path optimization and rapid reconfiguration based on current network conditions and performance requirements.
Real-Time Performance Optimization in Distributed Haptic Systems
Real-time performance optimization in distributed haptic systems represents a critical engineering challenge that directly impacts the effectiveness of scalable haptic teleoperation architectures. The fundamental requirement for maintaining sub-millisecond latencies while ensuring system stability across distributed networks necessitates sophisticated optimization strategies that address both computational and communication bottlenecks.
Network latency optimization forms the cornerstone of distributed haptic system performance. Advanced packet prioritization schemes, including Quality of Service (QoS) protocols specifically designed for haptic data streams, enable preferential treatment of time-critical force feedback information. Implementation of dedicated haptic communication protocols, such as enhanced versions of the Haptic Transport Protocol (HTP), provides deterministic delivery guarantees essential for maintaining temporal coherence across distributed nodes.
Computational load balancing across distributed processing units requires dynamic resource allocation algorithms that can adapt to varying system demands in real-time. Edge computing integration allows for localized processing of haptic calculations, reducing round-trip communication delays while maintaining centralized coordination for complex multi-user scenarios. Predictive load distribution mechanisms anticipate system bottlenecks and proactively redistribute computational tasks to maintain optimal performance levels.
Memory management optimization plays a crucial role in sustaining real-time performance standards. Implementation of lock-free data structures and circular buffer architectures minimizes memory allocation overhead while ensuring thread-safe operations across distributed components. Cache-coherent memory systems enable efficient data sharing between processing nodes without introducing synchronization delays that could compromise haptic fidelity.
Adaptive sampling rate control mechanisms dynamically adjust haptic update frequencies based on network conditions and computational availability. These systems maintain perceptual quality while preventing system overload during peak usage periods. Multi-threaded processing architectures with dedicated real-time scheduling policies ensure that haptic rendering tasks receive priority over non-critical system operations, maintaining consistent performance even under heavy computational loads.
Network latency optimization forms the cornerstone of distributed haptic system performance. Advanced packet prioritization schemes, including Quality of Service (QoS) protocols specifically designed for haptic data streams, enable preferential treatment of time-critical force feedback information. Implementation of dedicated haptic communication protocols, such as enhanced versions of the Haptic Transport Protocol (HTP), provides deterministic delivery guarantees essential for maintaining temporal coherence across distributed nodes.
Computational load balancing across distributed processing units requires dynamic resource allocation algorithms that can adapt to varying system demands in real-time. Edge computing integration allows for localized processing of haptic calculations, reducing round-trip communication delays while maintaining centralized coordination for complex multi-user scenarios. Predictive load distribution mechanisms anticipate system bottlenecks and proactively redistribute computational tasks to maintain optimal performance levels.
Memory management optimization plays a crucial role in sustaining real-time performance standards. Implementation of lock-free data structures and circular buffer architectures minimizes memory allocation overhead while ensuring thread-safe operations across distributed components. Cache-coherent memory systems enable efficient data sharing between processing nodes without introducing synchronization delays that could compromise haptic fidelity.
Adaptive sampling rate control mechanisms dynamically adjust haptic update frequencies based on network conditions and computational availability. These systems maintain perceptual quality while preventing system overload during peak usage periods. Multi-threaded processing architectures with dedicated real-time scheduling policies ensure that haptic rendering tasks receive priority over non-critical system operations, maintaining consistent performance even under heavy computational loads.
Unlock deeper insights with PatSnap Eureka Quick Research — get a full tech report to explore trends and direct your research. Try now!
Generate Your Research Report Instantly with AI Agent
Supercharge your innovation with PatSnap Eureka AI Agent Platform!