How to Apply Model Predictive Control in Automation Tasks
MAR 27, 20269 MIN READ
Generate Your Research Report Instantly with AI Agent
Patsnap Eureka helps you evaluate technical feasibility & market potential.
MPC Background and Automation Control Objectives
Model Predictive Control emerged in the 1970s as a revolutionary control strategy initially developed for the petrochemical industry. The technology evolved from the need to handle complex, multivariable processes with constraints, where traditional control methods proved inadequate. Early implementations like Dynamic Matrix Control and Model Algorithmic Control demonstrated significant improvements in process performance and economic benefits.
The fundamental principle of MPC lies in its ability to predict future system behavior using mathematical models, optimize control actions over a prediction horizon, and implement only the first control move before repeating the process. This receding horizon approach enables real-time adaptation to changing conditions and disturbances, making it particularly suitable for complex automation tasks.
Over the past five decades, MPC has undergone substantial technological evolution. The initial linear MPC formulations have expanded to include nonlinear MPC, robust MPC, and distributed MPC architectures. Advances in computational power and optimization algorithms have enabled real-time implementation across diverse industrial sectors, from manufacturing and robotics to energy systems and autonomous vehicles.
The primary objective of applying MPC in automation tasks centers on achieving optimal performance while satisfying operational constraints. Unlike conventional control approaches that react to current errors, MPC proactively anticipates future system states and optimizes control decisions accordingly. This predictive capability enables superior handling of system delays, multivariable interactions, and physical limitations inherent in automated systems.
Key automation control objectives include maintaining precise trajectory tracking, minimizing energy consumption, ensuring safety through constraint satisfaction, and maximizing throughput efficiency. MPC excels in scenarios where multiple conflicting objectives must be balanced simultaneously, such as maintaining product quality while minimizing production costs or ensuring safety while maximizing system performance.
The technology's ability to incorporate economic objectives directly into the control formulation has made it increasingly attractive for modern automation applications. Economic MPC variants optimize not just control performance but also operational profitability, aligning control decisions with business objectives. This integration of technical and economic considerations represents a significant advancement in automation control philosophy.
Contemporary MPC implementations leverage machine learning techniques to improve model accuracy and adapt to changing process conditions. The integration of artificial intelligence enhances the technology's capability to handle uncertainties and nonlinearities commonly encountered in complex automation environments, positioning MPC as a cornerstone technology for next-generation intelligent automation systems.
The fundamental principle of MPC lies in its ability to predict future system behavior using mathematical models, optimize control actions over a prediction horizon, and implement only the first control move before repeating the process. This receding horizon approach enables real-time adaptation to changing conditions and disturbances, making it particularly suitable for complex automation tasks.
Over the past five decades, MPC has undergone substantial technological evolution. The initial linear MPC formulations have expanded to include nonlinear MPC, robust MPC, and distributed MPC architectures. Advances in computational power and optimization algorithms have enabled real-time implementation across diverse industrial sectors, from manufacturing and robotics to energy systems and autonomous vehicles.
The primary objective of applying MPC in automation tasks centers on achieving optimal performance while satisfying operational constraints. Unlike conventional control approaches that react to current errors, MPC proactively anticipates future system states and optimizes control decisions accordingly. This predictive capability enables superior handling of system delays, multivariable interactions, and physical limitations inherent in automated systems.
Key automation control objectives include maintaining precise trajectory tracking, minimizing energy consumption, ensuring safety through constraint satisfaction, and maximizing throughput efficiency. MPC excels in scenarios where multiple conflicting objectives must be balanced simultaneously, such as maintaining product quality while minimizing production costs or ensuring safety while maximizing system performance.
The technology's ability to incorporate economic objectives directly into the control formulation has made it increasingly attractive for modern automation applications. Economic MPC variants optimize not just control performance but also operational profitability, aligning control decisions with business objectives. This integration of technical and economic considerations represents a significant advancement in automation control philosophy.
Contemporary MPC implementations leverage machine learning techniques to improve model accuracy and adapt to changing process conditions. The integration of artificial intelligence enhances the technology's capability to handle uncertainties and nonlinearities commonly encountered in complex automation environments, positioning MPC as a cornerstone technology for next-generation intelligent automation systems.
Market Demand for Advanced Automation Control Systems
The global automation industry is experiencing unprecedented growth driven by digital transformation initiatives across manufacturing, process industries, and infrastructure sectors. Organizations are increasingly seeking sophisticated control systems that can optimize operations, reduce energy consumption, and improve product quality while maintaining operational flexibility. This demand surge is particularly pronounced in industries where traditional control methods struggle to handle complex, multi-variable processes with stringent performance requirements.
Manufacturing sectors including automotive, pharmaceuticals, chemicals, and food processing are actively pursuing advanced control technologies to address rising operational complexity. These industries face mounting pressure to achieve higher efficiency standards while complying with increasingly strict regulatory requirements. The need for real-time optimization capabilities has become critical as companies strive to minimize waste, reduce production costs, and maintain consistent product quality across varying operational conditions.
Energy and utilities sectors represent another significant demand driver for advanced automation control systems. Power generation facilities, oil refineries, and water treatment plants require sophisticated control mechanisms capable of managing complex process dynamics while ensuring safety and environmental compliance. The integration of renewable energy sources has further amplified the need for predictive control capabilities that can handle intermittent power generation and grid stability challenges.
The emergence of Industry 4.0 and smart manufacturing concepts has fundamentally shifted market expectations toward intelligent automation solutions. Companies are no longer satisfied with basic feedback control systems and instead demand predictive capabilities that can anticipate process disturbances and optimize performance proactively. This shift has created substantial market opportunities for advanced control technologies that can integrate seamlessly with existing industrial infrastructure while providing enhanced operational intelligence.
Market research indicates strong growth momentum in sectors adopting digital twin technologies and advanced process optimization. The convergence of artificial intelligence, machine learning, and traditional control engineering has opened new application domains where sophisticated control algorithms can deliver measurable business value. Organizations are particularly interested in solutions that can demonstrate clear return on investment through improved operational efficiency and reduced maintenance costs.
Regional demand patterns show significant growth in Asia-Pacific manufacturing hubs, North American process industries, and European automotive sectors. These markets are characterized by high automation adoption rates and substantial investments in next-generation manufacturing technologies, creating favorable conditions for advanced control system deployment across diverse industrial applications.
Manufacturing sectors including automotive, pharmaceuticals, chemicals, and food processing are actively pursuing advanced control technologies to address rising operational complexity. These industries face mounting pressure to achieve higher efficiency standards while complying with increasingly strict regulatory requirements. The need for real-time optimization capabilities has become critical as companies strive to minimize waste, reduce production costs, and maintain consistent product quality across varying operational conditions.
Energy and utilities sectors represent another significant demand driver for advanced automation control systems. Power generation facilities, oil refineries, and water treatment plants require sophisticated control mechanisms capable of managing complex process dynamics while ensuring safety and environmental compliance. The integration of renewable energy sources has further amplified the need for predictive control capabilities that can handle intermittent power generation and grid stability challenges.
The emergence of Industry 4.0 and smart manufacturing concepts has fundamentally shifted market expectations toward intelligent automation solutions. Companies are no longer satisfied with basic feedback control systems and instead demand predictive capabilities that can anticipate process disturbances and optimize performance proactively. This shift has created substantial market opportunities for advanced control technologies that can integrate seamlessly with existing industrial infrastructure while providing enhanced operational intelligence.
Market research indicates strong growth momentum in sectors adopting digital twin technologies and advanced process optimization. The convergence of artificial intelligence, machine learning, and traditional control engineering has opened new application domains where sophisticated control algorithms can deliver measurable business value. Organizations are particularly interested in solutions that can demonstrate clear return on investment through improved operational efficiency and reduced maintenance costs.
Regional demand patterns show significant growth in Asia-Pacific manufacturing hubs, North American process industries, and European automotive sectors. These markets are characterized by high automation adoption rates and substantial investments in next-generation manufacturing technologies, creating favorable conditions for advanced control system deployment across diverse industrial applications.
Current MPC Implementation Challenges in Industrial Automation
Model Predictive Control implementation in industrial automation faces significant computational complexity challenges that limit real-time performance. The optimization algorithms required for MPC involve solving constrained optimization problems at each sampling interval, which can be computationally intensive for systems with multiple inputs, outputs, and constraints. This computational burden becomes particularly problematic in fast-sampling applications where control decisions must be made within milliseconds.
The modeling accuracy challenge represents another critical barrier to successful MPC deployment. Industrial processes often exhibit nonlinear behavior, time-varying parameters, and complex dynamics that are difficult to capture in mathematical models. Model-plant mismatch can lead to suboptimal control performance or even system instability, making robust model identification and validation essential yet challenging tasks.
Tuning complexity poses substantial difficulties for industrial practitioners implementing MPC systems. The controller requires careful selection of prediction horizons, control horizons, weighting matrices, and constraint parameters. Unlike traditional PID controllers with three parameters, MPC systems may have dozens of tuning parameters that interact in complex ways, requiring specialized expertise and extensive commissioning time.
Real-time constraint handling presents ongoing challenges in dynamic industrial environments. While MPC's ability to handle constraints is a key advantage, the computational overhead of constraint checking and feasibility maintenance can compromise real-time performance. Soft constraint formulations and constraint prioritization strategies add additional complexity to the implementation process.
Integration with existing control infrastructure creates practical implementation barriers. Many industrial facilities operate with legacy control systems, distributed control systems, and various communication protocols that may not seamlessly interface with modern MPC implementations. Ensuring reliable data exchange, maintaining system redundancy, and preserving existing safety interlocks while integrating MPC capabilities requires careful system architecture design.
Maintenance and diagnostic challenges emerge from the sophisticated nature of MPC algorithms. Traditional control engineers may lack the specialized knowledge required to troubleshoot MPC performance issues, modify controller parameters, or adapt the system to changing process conditions. This knowledge gap can result in increased maintenance costs and reduced system availability in industrial applications.
The modeling accuracy challenge represents another critical barrier to successful MPC deployment. Industrial processes often exhibit nonlinear behavior, time-varying parameters, and complex dynamics that are difficult to capture in mathematical models. Model-plant mismatch can lead to suboptimal control performance or even system instability, making robust model identification and validation essential yet challenging tasks.
Tuning complexity poses substantial difficulties for industrial practitioners implementing MPC systems. The controller requires careful selection of prediction horizons, control horizons, weighting matrices, and constraint parameters. Unlike traditional PID controllers with three parameters, MPC systems may have dozens of tuning parameters that interact in complex ways, requiring specialized expertise and extensive commissioning time.
Real-time constraint handling presents ongoing challenges in dynamic industrial environments. While MPC's ability to handle constraints is a key advantage, the computational overhead of constraint checking and feasibility maintenance can compromise real-time performance. Soft constraint formulations and constraint prioritization strategies add additional complexity to the implementation process.
Integration with existing control infrastructure creates practical implementation barriers. Many industrial facilities operate with legacy control systems, distributed control systems, and various communication protocols that may not seamlessly interface with modern MPC implementations. Ensuring reliable data exchange, maintaining system redundancy, and preserving existing safety interlocks while integrating MPC capabilities requires careful system architecture design.
Maintenance and diagnostic challenges emerge from the sophisticated nature of MPC algorithms. Traditional control engineers may lack the specialized knowledge required to troubleshoot MPC performance issues, modify controller parameters, or adapt the system to changing process conditions. This knowledge gap can result in increased maintenance costs and reduced system availability in industrial applications.
Existing MPC Solutions for Automation Applications
01 Model Predictive Control for Vehicle Systems
Model predictive control techniques are applied to vehicle systems including autonomous driving, powertrain control, and battery management. These methods utilize predictive models to optimize vehicle performance, energy efficiency, and safety by anticipating future states and constraints. The control algorithms process sensor data and system models to generate optimal control commands for steering, acceleration, and braking systems.- Model Predictive Control for Vehicle Systems: Model predictive control techniques are applied to vehicle systems including autonomous driving, powertrain control, and battery management. These methods utilize predictive models to optimize vehicle performance, energy efficiency, and safety by anticipating future states and constraints. The control algorithms process sensor data and system models to generate optimal control commands for steering, acceleration, braking, and power distribution.
- Industrial Process Control Using MPC: Model predictive control is implemented in industrial manufacturing and process control applications to optimize production parameters and maintain desired operating conditions. The approach involves creating mathematical models of industrial processes and using optimization algorithms to determine control actions that minimize costs while satisfying operational constraints. Applications include chemical processing, refining operations, and manufacturing automation.
- Energy Management and Power Systems Control: Model predictive control strategies are employed for energy management in power generation, distribution systems, and renewable energy integration. These methods optimize energy flow, balance supply and demand, and manage storage systems by predicting future energy requirements and generation capacity. The control framework considers economic objectives, grid stability, and environmental constraints to achieve efficient energy utilization.
- Adaptive and Learning-Based MPC Algorithms: Advanced model predictive control implementations incorporate adaptive mechanisms and machine learning techniques to improve control performance over time. These systems update their internal models based on observed system behavior, handle model uncertainties, and adapt to changing operating conditions. The learning capabilities enable the controller to refine predictions and optimize control strategies through experience and data analysis.
- Distributed and Hierarchical MPC Architectures: Model predictive control is implemented in distributed and hierarchical frameworks for complex multi-agent systems and large-scale applications. These architectures decompose the overall control problem into coordinated sub-problems, enabling scalable solutions for networked systems. The approach facilitates cooperation among multiple controllers while managing computational complexity and communication constraints in distributed environments.
02 Industrial Process Control Using MPC
Model predictive control is implemented in industrial manufacturing and process control applications to optimize production parameters and maintain system stability. The approach involves real-time optimization of control variables while satisfying operational constraints and performance objectives. These systems handle multi-variable control problems in chemical processes, manufacturing lines, and production facilities.Expand Specific Solutions03 Energy Management and Power Systems MPC
Model predictive control strategies are employed for energy management in power generation, distribution systems, and renewable energy integration. These methods optimize energy flow, load balancing, and grid stability by predicting demand patterns and system dynamics. The control framework coordinates multiple energy sources and storage systems to achieve efficient and reliable power delivery.Expand Specific Solutions04 HVAC and Building Climate Control
Model predictive control is utilized in heating, ventilation, and air conditioning systems to optimize building climate management and energy consumption. The control strategy predicts thermal dynamics, occupancy patterns, and weather conditions to maintain comfort while minimizing energy usage. These systems integrate multiple zones and equipment to achieve coordinated control of building environments.Expand Specific Solutions05 Robotics and Motion Control Applications
Model predictive control techniques are applied to robotic systems and motion control for trajectory planning and dynamic control. These methods enable robots to perform complex tasks by predicting future positions and optimizing control actions while respecting physical constraints. The control algorithms handle multi-axis coordination, obstacle avoidance, and real-time adaptation to changing conditions.Expand Specific Solutions
Key Players in MPC and Industrial Automation Industry
The Model Predictive Control (MPC) automation market is experiencing rapid growth, driven by increasing demand for advanced process optimization across manufacturing, automotive, and energy sectors. The industry is in a mature expansion phase with established players like ABB Ltd., Mitsubishi Electric Corp., and OMRON Corp. leading traditional automation solutions, while technology giants such as NVIDIA Corp. provide computational infrastructure for complex MPC algorithms. The market demonstrates high technical maturity, evidenced by comprehensive offerings from Honeywell International, Robert Bosch GmbH, and Fisher-Rosemount Systems spanning industrial automation to automotive applications. Research institutions including Tsinghua University and Beijing Institute of Technology contribute foundational algorithmic advances, while automotive leaders like Toyota Motor Corp. and Nissan Motor Co. drive sector-specific implementations. This convergence of industrial automation expertise, computational power, and domain-specific knowledge creates a competitive landscape where traditional automation companies collaborate with AI hardware providers to deliver increasingly sophisticated MPC solutions for complex real-time control applications.
ABB Ltd.
Technical Solution: ABB implements advanced Model Predictive Control (MPC) solutions through their System 800xA distributed control system and AC 800M controllers. Their MPC technology focuses on multivariable process control for complex industrial applications, particularly in power generation, oil & gas, and chemical processing. The system utilizes dynamic matrix control algorithms to predict future process behavior and optimize control actions over a prediction horizon. ABB's MPC solutions integrate seamlessly with their digital twin technology, enabling real-time optimization of plant operations while maintaining safety constraints and operational limits.
Strengths: Strong industrial automation heritage with proven MPC implementations across multiple sectors. Weaknesses: Higher implementation costs and complexity for smaller automation tasks.
NVIDIA Corp.
Technical Solution: NVIDIA leverages GPU-accelerated computing for real-time Model Predictive Control applications, particularly in autonomous systems and robotics. Their CUDA platform enables parallel processing of MPC optimization algorithms, significantly reducing computation time for complex control problems. NVIDIA's Jetson platform provides edge computing capabilities for MPC implementation in mobile robots and autonomous vehicles, while their Omniverse platform facilitates simulation-based MPC development. The company's AI-enhanced MPC approaches combine deep learning with traditional control theory to improve prediction accuracy and adapt to changing system dynamics.
Strengths: Superior computational performance for complex MPC algorithms and strong AI integration capabilities. Weaknesses: Limited direct industrial automation experience compared to traditional control system vendors.
Core MPC Algorithms and Control Theory Innovations
Method of generating optical control problems for industrial processes
PatentActiveUS20070143074A1
Innovation
- A method to merge arbitrarily interconnected MLD subsystems into a combined system, allowing for the automatic generation of a composite MLD system and the design of a model-based controller or scheduler for real-time control, using additional auxiliary variables and constraints, enabling the simplification of complex industrial processes and the generation of optimal control problems.




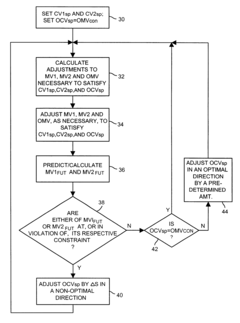
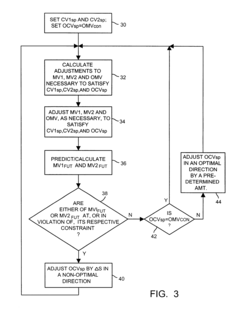
Integrated optimal model predictive control in a process control system
PatentInactiveUS6721609B1
Innovation
- A multi-input/multi-output logic controller with a feedback path and setpoint adjustment unit that monitors and adjusts process outputs to prevent constraint limit violations, using a model predictive controller to optimize process inputs and maintain desired setpoints while avoiding physical constraint limits.
Safety Standards and Regulations for Automated Control
The implementation of Model Predictive Control (MPC) in automation tasks operates within a comprehensive framework of safety standards and regulations that ensure reliable and secure system operation. These regulatory requirements have evolved significantly as MPC applications have expanded across critical industrial sectors, establishing mandatory compliance protocols for automated control systems.
International safety standards form the foundation of MPC implementation guidelines. The IEC 61508 functional safety standard provides the primary framework for safety-related systems, defining Safety Integrity Levels (SIL) that directly impact MPC controller design and validation requirements. For industrial automation, IEC 61511 specifically addresses process industry safety instrumented systems, establishing rigorous testing and verification protocols for MPC algorithms deployed in safety-critical applications.
Regional regulatory bodies have developed complementary standards tailored to specific industrial contexts. The European Union's Machinery Directive 2006/42/EC mandates comprehensive risk assessment procedures for automated systems incorporating MPC technology. Similarly, OSHA regulations in the United States require detailed safety analysis documentation for process control systems, particularly in chemical and petrochemical industries where MPC applications are prevalent.
Industry-specific regulations impose additional constraints on MPC implementation strategies. The pharmaceutical sector operates under FDA 21 CFR Part 11 requirements, demanding electronic signature validation and audit trail capabilities for MPC-controlled manufacturing processes. Nuclear power applications must comply with IEEE standards for nuclear facility instrumentation, requiring extensive redundancy and fail-safe mechanisms in MPC controller architectures.
Cybersecurity regulations have emerged as critical considerations for networked MPC systems. The NIST Cybersecurity Framework provides guidelines for protecting industrial control systems from cyber threats, while IEC 62443 establishes security requirements specifically for industrial automation and control systems. These standards mandate secure communication protocols, access control mechanisms, and intrusion detection capabilities for MPC implementations.
Compliance verification processes require comprehensive documentation demonstrating adherence to applicable safety standards. This includes formal verification of MPC algorithm stability, constraint satisfaction proofs, and extensive testing protocols under various operational scenarios. Regular safety audits and certification renewals ensure ongoing compliance throughout the system lifecycle.
International safety standards form the foundation of MPC implementation guidelines. The IEC 61508 functional safety standard provides the primary framework for safety-related systems, defining Safety Integrity Levels (SIL) that directly impact MPC controller design and validation requirements. For industrial automation, IEC 61511 specifically addresses process industry safety instrumented systems, establishing rigorous testing and verification protocols for MPC algorithms deployed in safety-critical applications.
Regional regulatory bodies have developed complementary standards tailored to specific industrial contexts. The European Union's Machinery Directive 2006/42/EC mandates comprehensive risk assessment procedures for automated systems incorporating MPC technology. Similarly, OSHA regulations in the United States require detailed safety analysis documentation for process control systems, particularly in chemical and petrochemical industries where MPC applications are prevalent.
Industry-specific regulations impose additional constraints on MPC implementation strategies. The pharmaceutical sector operates under FDA 21 CFR Part 11 requirements, demanding electronic signature validation and audit trail capabilities for MPC-controlled manufacturing processes. Nuclear power applications must comply with IEEE standards for nuclear facility instrumentation, requiring extensive redundancy and fail-safe mechanisms in MPC controller architectures.
Cybersecurity regulations have emerged as critical considerations for networked MPC systems. The NIST Cybersecurity Framework provides guidelines for protecting industrial control systems from cyber threats, while IEC 62443 establishes security requirements specifically for industrial automation and control systems. These standards mandate secure communication protocols, access control mechanisms, and intrusion detection capabilities for MPC implementations.
Compliance verification processes require comprehensive documentation demonstrating adherence to applicable safety standards. This includes formal verification of MPC algorithm stability, constraint satisfaction proofs, and extensive testing protocols under various operational scenarios. Regular safety audits and certification renewals ensure ongoing compliance throughout the system lifecycle.
Real-time Computing Requirements for MPC Implementation
Real-time computing requirements represent one of the most critical technical barriers in Model Predictive Control implementation for automation tasks. The fundamental challenge lies in solving complex optimization problems within stringent time constraints, typically ranging from milliseconds to seconds depending on the application domain. Industrial automation systems demand deterministic response times, where control decisions must be computed and executed before the next sampling interval to maintain system stability and performance.
The computational complexity of MPC algorithms scales significantly with prediction horizon length, number of constraints, and system dimensionality. For a typical linear MPC formulation, the optimization problem involves solving quadratic programming with inequality constraints, requiring computational resources that grow polynomially with problem size. Advanced nonlinear MPC implementations face even more severe computational demands, often requiring iterative solution methods that may not guarantee convergence within prescribed time limits.
Hardware architecture selection plays a pivotal role in meeting real-time requirements. Traditional CPU-based implementations often struggle with the parallel nature of MPC computations, leading to the adoption of specialized hardware platforms. Graphics Processing Units have emerged as promising solutions for parallelizable MPC algorithms, particularly for applications involving multiple similar subsystems. Field-Programmable Gate Arrays offer deterministic execution times and can be customized for specific MPC formulations, though they require significant development effort.
Algorithm optimization strategies are essential for reducing computational burden while maintaining control performance. Explicit MPC approaches pre-compute control laws offline, transforming the online optimization into simple function evaluations. However, this method faces scalability limitations due to exponential growth in memory requirements. Alternative approaches include warm-starting techniques, where previous solutions initialize current optimization problems, and move-blocking strategies that reduce the number of decision variables.
Sampling time selection involves balancing control performance with computational feasibility. Faster sampling rates improve disturbance rejection and tracking performance but impose tighter computational deadlines. Multi-rate MPC implementations offer compromise solutions, where different control loops operate at varying frequencies based on their dynamic characteristics and performance requirements.
Real-time operating systems and middleware solutions provide additional layers for ensuring deterministic execution. These platforms offer priority-based scheduling, memory management, and inter-process communication mechanisms specifically designed for time-critical applications, enabling reliable MPC deployment in industrial automation environments.
The computational complexity of MPC algorithms scales significantly with prediction horizon length, number of constraints, and system dimensionality. For a typical linear MPC formulation, the optimization problem involves solving quadratic programming with inequality constraints, requiring computational resources that grow polynomially with problem size. Advanced nonlinear MPC implementations face even more severe computational demands, often requiring iterative solution methods that may not guarantee convergence within prescribed time limits.
Hardware architecture selection plays a pivotal role in meeting real-time requirements. Traditional CPU-based implementations often struggle with the parallel nature of MPC computations, leading to the adoption of specialized hardware platforms. Graphics Processing Units have emerged as promising solutions for parallelizable MPC algorithms, particularly for applications involving multiple similar subsystems. Field-Programmable Gate Arrays offer deterministic execution times and can be customized for specific MPC formulations, though they require significant development effort.
Algorithm optimization strategies are essential for reducing computational burden while maintaining control performance. Explicit MPC approaches pre-compute control laws offline, transforming the online optimization into simple function evaluations. However, this method faces scalability limitations due to exponential growth in memory requirements. Alternative approaches include warm-starting techniques, where previous solutions initialize current optimization problems, and move-blocking strategies that reduce the number of decision variables.
Sampling time selection involves balancing control performance with computational feasibility. Faster sampling rates improve disturbance rejection and tracking performance but impose tighter computational deadlines. Multi-rate MPC implementations offer compromise solutions, where different control loops operate at varying frequencies based on their dynamic characteristics and performance requirements.
Real-time operating systems and middleware solutions provide additional layers for ensuring deterministic execution. These platforms offer priority-based scheduling, memory management, and inter-process communication mechanisms specifically designed for time-critical applications, enabling reliable MPC deployment in industrial automation environments.
Unlock deeper insights with Patsnap Eureka Quick Research — get a full tech report to explore trends and direct your research. Try now!
Generate Your Research Report Instantly with AI Agent
Supercharge your innovation with Patsnap Eureka AI Agent Platform!